1.本发明属于轴承故障诊断的技术领域,尤其涉及一种轴承故障检测装置及深度强化学习算法。
背景技术:
2.轴承是现代机械设备中最主要的零部件之一,轴承的使用对支撑机械旋转体起到了重要作用,且也可以有效降低其在运动过程中的摩擦系数保证回转精度。轴承广泛应用于冶金、风电、矿山机械、航天等领域。近几年,随着工业4.0的提出和不断发展,轴承需要满足高转速,重负载以及长时间连续运行等苛刻的工作条件,这也使得轴承故障出现的频次增加,从而导致整个旋转机械设备系统的宕机、损坏,进而给社会带来经济损失,甚至导致人生危害。
3.对轴承的故障情况需要能够及时检测,目前采用的轴承故障检测手段存在下列问题:
4.(1)输入信号多为人工经信号处理的特征向量或图片,这不仅需要比较强的先验知识,而且可能造成原始信号的破坏;
5.(2)当前所见到的大多数模型未考虑到参杂噪声信号情况下的故障诊断,而在实际生产的复杂环境下难免会有噪声信号,这会大大降低模型的诊断精度和鲁棒性;
6.(3)传统的深度神经网络多存在局部最小值和过拟合等问题使得模型训练后准确率不高且稳定性较差的现象。
技术实现要素:
7.基于上述现有技术的不足,本发明所要解决的技术问题在于提供一种轴承故障检测装置及深度强化学习算法,实现了故障诊断的自动提取以及噪声环境下端到端的智能故障诊断。
8.为了解决上述技术问题,本发明通过以下技术方案来实现:本发明提供一种轴承故障检测装置,包括:底板以及传动装置和测试装置;
9.所述传动装置包括电机箱、第一轴承座、连接孔、伺服电机、减速器、第一锥齿轮、第二锥齿轮、传动轴承和主轴,所述底板的顶端固定连接电机箱,所述电机箱的内部顶端安装有伺服电机,所述底板的顶端固定连接第一轴承座;所述测试装置包括箱门、第二轴承座、故障轴承、电动推杆、噪声传感器、开口、支撑座、顶座、控制面板、显示屏、单片机和测试箱,所述底板的顶端两侧均固定连接测试箱,所述测试箱的顶端固定连接顶座。
10.可选的,所述伺服电机的输出端安装有减速器,所述减速器的输出端套接有第一锥齿轮,所述第一锥齿轮啮合连接两个第二锥齿轮,所述第二锥齿轮固定连接在主轴的一端,所述主轴通过传动轴承转动连接在第一轴承座的内部,所述传动轴承安装在第一轴承座的内部。
11.进一步的,所述第一轴承座的数量为两个,两个所述第一轴承座均位于电机箱与
底板之间,所述底板的顶端两侧均固定连接支撑座,所述支撑座与第一轴承座之间转动连接主轴,所述主轴转动连接在连接孔的内部,所述连接孔的数量为两个,两个所述连接孔对称分布在电机箱的两端侧壁。
12.可选的,所述测试箱的一端侧壁开设有开口,所述开口的内部铰接有箱门,所述测试箱的内部转动连接主轴,所述主轴的一端贯穿开口内部的箱门,所述主轴转动连接第二轴承座,所述第二轴承座安装在底板的顶端并位于测试箱的内部,所述第二轴承座的内部安装有故障轴承,所述故障轴承安装在主轴的一端。
13.本发明还提供一种轴承故障检测的深度强化学习算法,包括以下步骤:
14.步骤1、确定数据状态个数ns=l
t
/ls其中ns为数据状态个数,l
t
为时域信号长度,ls为样本长度;由此,可得到某个时域数据状态下标k表示状态序列,上标td表示时域数据;
15.步骤2、将故障类型映射到动作空间集a={a1=0,a1=1,...,ai=n-1},n为故障类型数,可得到某故障类型的数据状态空间集:
[0016][0017]
其中i《n,k≤ns,sk为当前故障数据状态空间中的某个状态,包含对时域数据;
[0018]
步骤3、把动作空间集a和数据状态空间集s的关系进行对应:
[0019][0020]
步骤4、创建出数据状态空间后,当智能体从环境中的状态sk后,决策出动作ai;
[0021]
步骤5、环境根据动作ai返回对应故障类型的数据状态空间中某个状态sk和奖励值r,回放记忆单元将每一次的交互数据(sk,ai,r,sk)存储在回放记忆单元d中;
[0022]
步骤6、随机抽取k个样本输入到深度强化学习网络和目标网络,采用随机梯度下降法来训练权重和偏置值参数以最大化强化学习函数值;
[0023]
步骤7、调试超参数使深度强化学习网络学习数据状态与动作之间复杂的映射关系;
[0024]
步骤8、将测试集输入到深度强化学习网络模型,验证基于连续小波变换和深度强化学习的轴承故障诊断方法的有效性。
[0025]
其中,所述故障类型包括磨损失效、疲劳失效、腐蚀失效。
[0026]
由上,本发明的轴承故障检测装置及深度强化学习算法以一维故障信号作为模型的输入,以各故障的故障类型作为当前输入的可选动作,采用基于统计的随机置零方法提高模型的抗噪能力,通过深度学习网络有效提取各故障的故障特征,拟合当前状态动作对的强化学习值,并以深度强化学习模型完成各个故障类型的识别。
[0027]
本发明实现了故障诊断的自动提取以及噪声环境下端到端的智能故障诊断。首先获取训练数据,所述训练数据为表征轴承振动信号的历史数据,提取所述训练数据的特征值和所述特征值对应的故障类型,得到某个时域数据状态,接着构建环境状态空间,将故障类型映射到动作空间集,得到某故障类型的数据状态空间集,接着通过训练深度强化学习网络模型,调试超参数使深度强化学习网络学习数据状态与动作之间复杂的映射关系,最后进行故障诊断结果评估,即将测试集输入到深度强化学习网络模型,验证基于深度强化
学习的轴承故障诊断方法的有效性,提高了轴承故障诊断的准确率。
[0028]
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下结合优选实施例,并配合附图,详细说明如下。
附图说明
[0029]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例的附图作简单地介绍。
[0030]
图1为本发明的轴承故障检测装置的整体结构示意图;
[0031]
图2为本发明的轴承故障检测装置的内部结构示意图;
[0032]
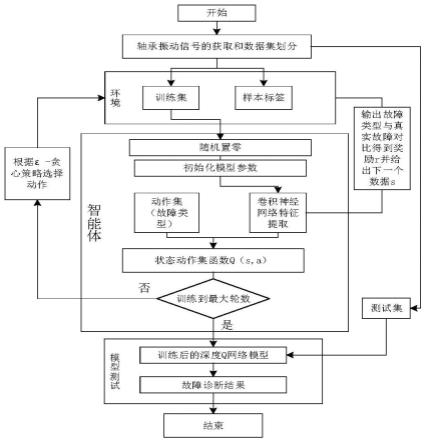
图3为本发明的轴承故障检测的深度强化学习算法的流程图。
[0033]
图中标记:1、底板,2、电机箱,3、第一轴承座,4、连接孔,5、伺服电机,6、减速器,7、第一锥齿轮,8、第二锥齿轮,9、传动轴承,10、主轴,11、箱门,12、第二轴承座,13、故障轴承,14、电动推杆,15、噪声传感器,16、开口,17、支撑座,18、顶座,19、控制面板,20、显示屏,21、单片机,22、测试箱。
具体实施方式
[0034]
下面结合附图详细说明本发明的具体实施方式,其作为本说明书的一部分,通过实施例来说明本发明的原理,本发明的其他方面、特征及其优点通过该详细说明将会变得一目了然。在所参照的附图中,不同的图中相同或相似的部件使用相同的附图标号来表示。
[0035]
如图1至2所示,本发明的轴承故障检测装置包括底板1以及传动装置和测试装置,其中,传动装置包括电机箱2、第一轴承座3、连接孔4、伺服电机5、减速器6、第一锥齿轮7、第二锥齿轮8、传动轴承9和主轴10,底板1的顶端固定连接电机箱2,所述电机箱2的内部顶端安装有伺服电机5,所述底板1的顶端固定连接第一轴承座4。
[0036]
测试装置包括箱门11、第二轴承座12、故障轴承13、电动推杆14、噪声传感器15、开口16、支撑座17、顶座18、控制面板19、显示屏20、单片机21和测试箱22,底板1的顶端两侧均固定连接测试箱22,测试箱22的顶端固定连接顶座18。
[0037]
伺服电机5的输出端安装有减速器6,所述减速器6的输出端套接有第一锥齿轮7,所述第一锥齿轮7啮合连接两个第二锥齿轮8,所述第二锥齿轮8固定连接在主轴10的一端,所述主轴10通过传动轴承9转动连接在第一轴承座3的内部,所述传动轴承9安装在第一轴承座3的内部。
[0038]
第一轴承座3的数量为两个,两个所述第一轴承座3均位于电机箱2与底板1之间,所述底板1的顶端两侧均固定连接支撑座17,所述支撑座17与第一轴承座3之间转动连接主轴10,所述主轴10转动连接在连接孔4的内部,所述连接孔4的数量为两个,两个所述连接孔4对称分布在电机箱2的两端侧壁。测试箱22的一端侧壁开设有开口16,所述开口16的内部铰接有箱门11,所述测试箱22的内部转动连接主轴10,所述主轴10的一端贯穿开口16内部的箱门11,所述主轴10转动连接第二轴承座12,所述第二轴承座12安装在底板1的顶端并位于测试箱22的内部,所述第二轴承座12的内部安装有故障轴承13,所述故障轴承13安装在主轴10的一端。
[0039]
如图3所示,本发明的轴承故障检测的深度强化学习算法,包括如下步骤:
[0040]
步骤1、确定数据状态(即样本)个数ns=l
t
/ls其中ns为数据状态个数,l
t
为时域信号长度,ls为样本长度;由此,可得到某个时域数据状态下标k表示状态序列,上标td表示时域数据;
[0041]
步骤2、将故障类型映射到动作空间集a={a1=0,a1=1,...,ai=n-1},n为故障类型数。可得到某故障类型的数据状态空间集:
[0042][0043]
其中i《n,k≤ns,sk为当前故障数据状态空间中的某个状态,包含对时域数据;
[0044]
步骤3、把动作空间集a和数据状态空间集s的关系进行对应:
[0045][0046]
步骤4、创建出数据状态空间后,当智能体从环境中的状态sk后,决策出动作ai;
[0047]
步骤5、环境根据动作ai返回对应故障类型的数据状态空间中某个状态sk和奖励值r,回放记忆单元将每一次的交互数据(sk,ai,r,sk)存储在回放记忆单元d中;
[0048]
步骤6、随机抽取k个样本输入到深度强化学习网络和目标网络,采用随机梯度下降法来训练权重和偏置值参数以最大化强化学习函数值;
[0049]
步骤7、调试超参数使深度强化学习网络学习数据状态与动作之间复杂的映射关系;
[0050]
步骤8、将测试集输入到深度强化学习网络模型,验证基于连续小波变换和深度强化学习的轴承故障诊断方法的有效性。
[0051]
在本发明中,确定数据状态(即样本)个数,得到某个时域数据状态;将故障类型映射到动作空间集,得到某故障类型的数据状态空间集;对应动作空间集a和数据状态空间集s的关系;当智能体从环境中的状态sk后,决策出动作ai;环境根据动作ai返回对应故障类型的数据状态空间中某个状态sk和奖励值r,回放记忆单元将每一次的交互数据(sk,ai,r,sk)存储在回放记忆单元d中;随机抽取k个样本输入到深度强化学习网络和目标网络,采用随机梯度下降法来训练权重和偏置值参数以最大化强化学习函数值;调试超参数使深度强化学习网络学习数据状态与动作之间复杂的映射关系。将测试集输入到深度强化学习网络模型,验证基于连续小波变换和深度强化学习的轴承故障诊断方法的有效性。
[0052]
以上所述是本发明的优选实施方式而已,当然不能以此来限定本发明之权利范围,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和变动,这些改进和变动也视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。