1.本发明涉及一种在高尔夫练习或利用虚拟高尔夫模拟装置的屏幕高尔夫等中形成用户利用高尔夫球杆进行高尔夫挥杆的击球区的高尔夫挥杆平台及用于实现该高尔夫挥杆平台的地形的控制方法。
背景技术:
2.通常,在高尔夫球场中,虽然也有单纯在平地进行高尔夫击球的情况,但在例如下坡倾斜、上坡倾斜、平缓的倾斜、陡坡、凹陷的地形等多种多样的地形条件下进行高尔夫击球的情况较多。
3.如此,为了让进行高尔夫练习等的用户不但能够练习平地上的高尔夫击球,还能够练习多种多样的地形条件下的高尔夫击球,高尔夫练习场或屏幕高尔夫系统中设有挥杆板作为用户可以进行高尔夫击球的击球区,并使所述挥杆板能够以任意的角度倾斜,使得用户可以在该挥杆板上练习多种多样的地形条件下的高尔夫击球。
4.如上所述的以往的挥杆板曾以能够通过电机使单个板型部件以多种角度倾斜的构造为基本构造。
5.作为与此相关的现有技术文献,已公开有韩国授权专利第0912015号、韩国授权专利第1422073号、日本公开专利公报特开2001-145717号等现有技术。
6.然而,实现为单纯使单个板型部件仅向一侧方向倾斜的挥杆板在让用户能够在多种多样的地形条件下练习高尔夫击球的方面存在局限性,并且由于放置球并进行打击的高尔夫球垫部分设于该单一的板型部件的一侧,用户站上去的击球区与放置球的高尔夫球垫部分在一个挥杆板上同时实现倾斜,因而挥杆板的地形的实现与虚拟高尔夫球场上的地形有相当大的差异,并且还有在令人对高尔夫击球怀有现实感的方面存在局限性的问题。
技术实现要素:
7.技术问题
8.本发明旨在提供如下高尔夫挥杆平台及其控制方法,即,为了分别独立地驱动击球区部分和打击部分,以虚拟高尔夫球场上放置虚拟球的位置为基准,由对应于所述击球区部分和打击部分的区域的地形信息计算倾斜信息,以控制为分别驱动所述击球区部分和打击部分,由此不但能够实现以往的挥杆板难以实现的更多样的地形,而且还能够非常近似地实现欲实现的虚拟高尔夫球场上的地形条件,从而能够提高对高尔夫击球环境的现实感。
9.技术方案
10.本发明的一实施例提供一种高尔夫挥杆平台,其使用户能够进行高尔夫挥杆,所述高尔夫挥杆平台包括:下部支撑部,其被区分为击球区支撑部和打击支撑部;打击部,其设于所述下部支撑部的打击支撑部的上方,被设置为为了进行高尔夫挥杆而放置高尔夫球,并且实现基于地形信息的倾斜;击球区部,其设置于所述下部支撑部的击球区支撑部的
上方,并且基于所述地形信息与所述打击部一同实现对应于所述地形信息的倾斜;击球区地形实现驱动部,其固定设置于所述下部支撑部的击球区支撑部与所述击球区部之间,并且驱动所述击球区部实现规定的倾斜;打击地形实现驱动部,其固定设置于所述下部支撑部的打击支撑部与所述打击部之间,并且驱动所述打击部实现规定的倾斜;以及控制部,其控制对虚拟高尔夫球场的影像,并且以所述虚拟高尔夫球场上的放置虚拟球的位置为基准从对应于所述击球区部的区域的地形信息计算所述击球区部的倾斜信息,并从对应于所述打击部的区域的地形信息计算所述打击部的倾斜信息,以分别独立地控制所述击球区地形实现驱动部和打击地形实现驱动部。
11.此外,优选地,所述击球区部具备基于所述地形信息分别实现倾斜的多个分割板以实现对应于所述地形信息的复合倾斜。
12.此外,优选地,所述击球区部包括旋转支撑毂,该旋转支撑毂具备于中心部以固定支撑所述多个分割板中的每一个的中心部侧端部能够相对于两轴方向旋转,并且以所述旋转支撑毂为中心被分割为多个分割板而设置,且构成为分别实现规定的倾斜。
13.此外,优选地,所述打击地形实现驱动部驱动为分别实现向垂直于所述打击部的横轴的方向的倾斜及向垂直于所述打击部的纵轴的方向的倾斜,并且驱动为能够向所述击球区部位移。
14.此外,优选地,所述打击地形实现驱动部构成为,以在所述打击部上形成三角形的三个顶点位置中的每一个为作用点,在每个所述作用点结合两个致动器的各自的一端部,并且所述两个致动器的各自的另一端部分别结合于所述下部支撑部的打击支撑部上彼此分离的位置,从而构成为使所述打击部的每个所述作用点相对于所述下部支撑部的打击支撑部被三角支撑,以在每个所述作用点实现对所述打击部的倾斜。
15.此外,优选地,所述控制部基于对用户打击的高尔夫球的传感装置的传感信息控制所述虚拟球在所述虚拟高尔夫球场上移动的模拟影像的实现,并且根据所述传感装置所感测到的所述打击部上的高尔夫球的位置信息对所述虚拟高尔夫球场上的所述虚拟球的位置进行对应,并以进行对应的所述虚拟球的位置为基准来规定与预先存储的所述击球区部及所述打击部的区域相对应的区域。
16.此外,优选地,所述控制部执行以下处理:将所述虚拟高尔夫球场上的所述虚拟球的位置设定为打击部对应区域上的原点,以规定作为对应于所述打击部的区域的打击部对应区域;将以所述虚拟球为基准隔开预先设定的距离的位置设定为击球区部对应区域上的原点,以规定作为对应于所述击球区部的区域的击球区部对应区域;以及基于所设定的每个所述原点分别计算向横轴方向的倾斜度和向纵轴方向的倾斜度,并控制为根据计算出的两个方向中的每一个的倾斜度信息分别调节所述打击部和所述击球区部的倾斜。
17.此外,优选地,所述击球区部被分割为多个分割板而设置,且构成为分别实现规定的倾斜,所述控制部以所述虚拟球为基准来规定作为对应于所述击球区部的区域的击球区部对应区域,并以设定于所述击球区部对应区域上的原点为基准分别计算向横轴的左侧方向的倾斜度、向横轴的右侧方向的倾斜度、在纵轴的前方上的倾斜度及向纵轴的后方的倾斜度,以与向所述横轴的左侧方向的倾斜度对应地驱动所述多个分割板中相邻的分割板之间的高度,由此控制所述击球区部的倾斜的实现。
18.另一方面,本发明的一实施例的高尔夫挥杆平台的控制方法包括:由客户端实现
对虚拟高尔夫球场的影像,并且以所述虚拟高尔夫球场上放置虚拟球的位置为基准分别规定设置为放置高尔夫球以进行高尔夫挥杆的打击部和对应于用户为了进行高尔夫挥杆而站上去的击球区部的所述虚拟高尔夫球场上的区域的步骤;由分别对应于所规定的所述打击部和所述击球区部的区域的地形信息计算所述打击部的倾斜信息和所述击球区部的倾斜信息的步骤;将打击地形实现驱动部控制为根据计算输出的所述信息实现所述打击部的倾斜的步骤;以及将击球区地形实现驱动部控制为根据计算出的所述信息实现所述击球区部的倾斜的步骤。
19.此外,优选地,规定所述虚拟高尔夫球场上的区域的步骤包括:以所述虚拟高尔夫球场上的所述虚拟球为基准来规定作为对应于所述打击部的区域的打击部对应区域的步骤,计算所述倾斜信息的步骤包括:以所述虚拟球的位置为原点分别计算作为向横轴方向的倾斜度的第一打击部倾斜度和作为向纵轴方向的倾斜度的第二打击部倾斜度的步骤,在控制所述打击地形实现驱动部的步骤中,将所述打击地形实现驱动部控制为根据计算出的所述第一打击部倾斜度及所述第二打击部倾斜度的信息调节所述打击部的倾斜。
20.此外,优选地,所述击球区部具备基于地形信息分别实现倾斜的多个分割板以实现对应于所述地形信息的复合倾斜,并且规定所述虚拟高尔夫球场上的区域的步骤包括:以所述虚拟高尔夫球场上的所述虚拟球为基准,以对应于具备所述分割板的击球区部的方式规定击球区部对应区域的步骤,计算所述倾斜信息的步骤包括:以所述击球区部对应区域的中心点为原点分别计算作为向纵轴的后方的倾斜度的第一击球区部倾斜度、作为向横轴的右侧方向的倾斜度的第二击球区部倾斜度、作为向纵轴的上方的倾斜度的第三击球区部倾斜度以及作为向横轴的左侧方向的倾斜度的第四击球区部倾斜度的步骤,在控制所述击球区地形实现驱动部的步骤中,将所述击球区地形实现驱动部控制为根据计算出的所述第一击球区部倾斜度、所述第二击球区部倾斜度、所述第三击球区部倾斜度以及所述第四击球区部倾斜度信息调节所述击球区部的各分割板的倾斜。
21.此外,优选地,控制所述打击地形实现驱动部的步骤包括:根据在计算所述打击部的倾斜信息及所述击球区部的倾斜信息的步骤中计算出的信息判断在所述击球区部与所述打击部之间是否发生规定距离设为间距的步骤;以及当判断为在所述击球区部与所述打击部之间发生间距时,将所述打击地形实现驱动部控制为使所述打击部向所述击球区部侧位移的步骤。
22.发明的效果
23.本发明的高尔夫挥杆平台及其控制方法具有如下效果:在使多个分割的板形成一个击球区的同时,使放置高尔夫球封入打击部分分离,以控制为分别独立地驱动击球区部分的分割的板和打击部分,由此不但能够实现以往的挥杆板难以实现的更多样的地形,而且还能够非常近似地实现欲实现的虚拟高尔夫球场上的地形条件,从而能够提高对高尔夫击球环境的现实感。
附图说明
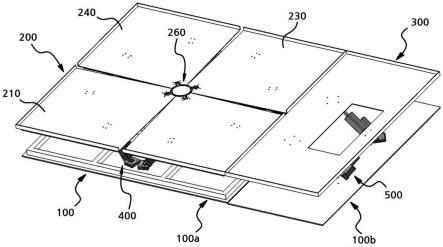
24.图1是本发明的一实施例的高尔夫挥杆平台的立体图。
25.图2是从本发明的一实施例的高尔夫挥杆平台的下部支撑部分离分割击球区部和打击部而示出的立体图。
26.图3是示出从上方观察图2所示的下部支撑部、击球区地形实现驱动部及打击地形实现驱动部的构造的图。
27.图4是分别示出图2所示的击球区地形实现驱动部的驱动致动器和旋转支撑毂的构造的图。
28.图5用于说明本发明的一实施例的高尔夫挥杆平台的动作的图。
29.图6是示出对本发明的一实施例的高尔夫挥杆平台的控制系统的框图。
30.图7是用于说明对本发明的一实施例的高尔夫挥杆平台的倾斜度信息的计算及基于其的倾斜的实现的控制的图。
31.图8是示出本发明的一实施例的高尔夫挥杆平台的控制方法的流程图。
32.图9是用于说明本发明的一实施例的高尔夫挥杆平台的分割击球区部与打击部之间的间隙的发生及用于防止其的控制的图。
具体实施方式
33.下面参照附图对关于本发明的分割高尔夫挥杆平台及其控制方法的具体内容进行说明。
34.首先,参照图1对本发明的一实施例的高尔夫挥杆平台下降说明。图1是本发明的一实施例的高尔夫挥杆平台的立体图。
35.如图1所示,本发明的一实施例的高尔夫挥杆平台是区分地分别设有形成使用户能够进行高尔夫挥杆的击球区的部分和放置高尔夫球以基于用户的高尔夫挥杆进行通过高尔夫球杆的打击的部分的装置,包括下部支撑部100、击球区部200、打击部300、击球区地形实现驱动部400、打击地形实现驱动部500、以及控制部(未图示)。
36.下部支撑部100是在本发明的一实施例的高尔夫挥杆平台的下端支撑装置的构成要素,具备于设置高尔夫挥杆平台的地板,所述下部支撑部100区分地设有支撑所述击球区部200的击球区支撑部100a和支撑所述打击部300的打击支撑部100b,在所述击球区支撑部100a设置有所述击球区地形实现驱动部400,在所述打击支撑部100b设置有所述打击地形实现驱动部500。
37.所述击球区部200设置于所述下部支撑部100的击球区支撑部100a上的击球区地形实现驱动部400的上方并形成用户站上去的击球区,并且构成为基于地形信息(例如,实现为虚拟高尔夫模拟系统的影像的虚拟高尔夫球场的地形信息)来实现倾斜。所述击球区部200可以由单个板构成,也可以由分别实现倾斜的多个分割板构成,并且,可以由具有大小不同的面积的多个分割板构成,也可以如图1所示构成为具备四个分割板210~240。
38.如上所述,在构成击球区部200时,可以实施多样的实施例,但下面以由整个板被分割为4等份的分割板构成的击球区部200为实施例进行说明。
39.图1中示出通过将整个板分割为4等份具备第一分割板210、第二分割板220、第三分割板230及第四分割板240作为上述多个分割板以整体地形成击球区部200的情况。
40.在所述击球区部200的中心部具备旋转支撑毂260,以固定支撑如上所述的多个分割板210~240中的每一个的中心部侧端部能够旋转。
41.虽然图中未图示,所述旋转支撑毂260可以由向上下方向驱动的毂驱动部(未图示)在上下方向上驱动。
42.所述打击部300是具备于所述下部支撑部100的打击支撑部100b以为了进行高尔夫挥杆而放置高尔夫球且进行通过用户的高尔夫球杆的高尔夫球的打击的部分。所述打击部300也同样构成为基于地形信息来实现倾斜。
43.所述击球区地形实现驱动部400固定设置于击球区支撑部100a与击球区部200之间,是驱动所述击球区部200的各分割板210~240分别实现规定的倾斜以使击球区部200实现规定的地形的构成要素。
44.所述打击地形实现驱动部500固定设置于打击支撑部100b与所述打击部300之间,是驱动所述打击部300实现规定的倾斜的构成要素。
45.所述控制部控制所述击球区地形实现驱动部400、毂驱动部(未图示)及打击地形实现驱动部500,以实现所述击球区部200的每个分割板210~240的倾斜和所述打击部300的倾斜,从来自诸如屏幕高尔夫等的虚拟高尔夫模拟装置的计算机,即客户端的欲实现的虚拟高尔夫球场上的地形信息运算用于所述驱动部中的每一个的控制的控制值并传递至每个驱动部,或当由所述客户端运算控制值时接收该控制值并传递至每个驱动部以进行控制,使得高尔夫挥杆平台实现接近虚拟高尔夫球场上的放置虚拟球的位置轴周边的地形信息的复合倾斜。
46.关于通过所述客户端和所述控制部实现分割击球区部和打击部的地形的具体的控制方法,将在后面进行描述。
47.下面参照图2至图4对如上所述的本发明的构造进行更具体的说明。
48.图2是从本发明的一实施例的高尔夫挥杆平台的下部支撑部分离击球区部和打击部而示出的立体图,图3是示出从上方观察图2所示的下部支撑部、击球区地形实现驱动部及打击地形实现驱动部的构造的图,图4是分别示出图2所示的击球区地形实现驱动部的驱动致动器和旋转支撑毂的构造的图。
49.如图2和图3所示,在下部支撑部100的击球区支撑部100a上在其中心部具备旋转支撑毂260,上下驱动所述旋转支撑毂260的毂驱动部490设置于所述击球区支撑部100a的中心部,并且在其周边设置有多个驱动致动器410~480。
50.所述旋转支撑毂260是在中心部固定支撑击球区部200的每个分割板210~240而发挥支撑每个分割板210~240旋转(除了一轴方向的旋转外,还包括两轴方向的旋转,对此将在后面进行描述)的功能的构成要素。
51.如图2和图3所示,上述多个驱动致动器可以实现为第一驱动致动器410、第二驱动致动器420、第三驱动致动器430、第四驱动致动器440、第五驱动致动器450、第六驱动致动器460、第七驱动致动器470及第八驱动致动器480。
52.所述驱动致动器410~480中的每一个在其下端具备下部固定部件,图2和图3中示出在第一驱动致动器410的下端具备第一下部固定部件(未图示),在第二驱动致动器420的下端具备第二下部固定部件425,在第三驱动致动器430的下端具备第三下部固定部件435,在第四驱动致动器440的下端具备第四下部固定部件445,在第五驱动致动器450的下端具备第五下部固定部件455,在第六驱动致动器460的下端具备第六下部固定部件(未图示),在第七驱动致动器470的下端具备第七下部固定部件475,并且在第八驱动致动器480的下端具备第八下部固定部件485的情况。
53.上述下部固定部件425~485中的每一个在使各自对应的驱动致动器410~480能
够旋转的同时,使各自对应的驱动致动器410~480能够固定于击球区支撑部100a上。
54.另一方面,所述驱动致动器410~480中的每一个在其上端具备上部固定部件,图2和图3中示出在第一驱动致动器410的上端具备第一上部固定部件416,在第二驱动致动器420的上端具备第二上部固定部件426,在第三驱动致动器430的上端具备第三上部固定部件436,在第四驱动致动器440的上端具备第四上部固定部件446,在第五驱动致动器450的上端具备第五上部固定部件456,在第六驱动致动器460的上端具备第六上部固定部件466,在第七驱动致动器470的上端具备第七上部固定部件476,并且在第八驱动致动器480的上端具备第八上部固定部件486的情况。
55.上述上部固定部件416~486中的每一个在使各自对应的驱动致动器410~480能够旋转的同时,使各自对应的驱动致动器410~480能够固定于所述击球区部200的每个分割板210~240的下端面。
56.然而,如图2和图3所示,驱动致动器410~480中的每一个从下部固定部件向上部固定部件倾斜规定角度并以歪斜的姿势固定而被驱动,并且两个驱动致动器固定于一个分割板而被驱动为实现对应分割板的倾斜。
57.另外,如图2所示,击球区部200的分割板210~240中的每一个在其中心部形成有槽部201~204,并且分割板210~240中的每一个形成一个设置孔205,以在所述设置孔205设置旋转支撑毂260。
58.如图3所示,所述旋转支撑毂260构成为具备中心部的毂轴部件261以及以对应于多个所述分割板210~240中的每一个的方式设于所述毂轴部件261的旋转支撑部271~274。
59.即,如图2和图3所示,构成为在第一分割板210的第一槽部201侧固定旋转支撑毂260的第一旋转支撑部271,在第二分割板220的第二槽部202侧固定旋转支撑毂260的第二旋转支撑部272,在第三分割板230的第三槽部203侧固定旋转支撑毂260的第三旋转支撑部273,在第四分割板240的第四槽部204侧固定旋转支撑毂260的第四旋转支撑部274。
60.如图2和图3所示,在第一分割板210固定有旋转支撑毂260的第一旋转支撑部271、第一驱动致动器410的第一上部固定部件416及第二驱动致动器420的第二上部固定部件426,以使每个设置位置形成三角形的每个顶点。
61.同样地,在第二分割板220固定有旋转支撑毂260的第二旋转支撑部272、第三驱动致动器430的第三上部固定部件436及第四驱动致动器440的第四上部固定部件446,以使每个设置位置形成三角形的每个顶点;在第三分割板230固定有旋转支撑毂260的第三旋转支撑部273、第五驱动致动器450的第五上部固定部件456及第六驱动致动器460的第六上部固定部件466,以使每个设置位置形成三角形的每个顶点;在第四分割板240固定有旋转支撑毂260的第四旋转支撑部274、第七驱动致动器470的第七上部固定部件476及第八驱动致动器480的第八上部固定部件486,以使每个设置位置形成三角形的每个顶点。
62.即,如图2和图3所示,击球区地形实现驱动部400可以构成为,在以所述分割板210~240中的每一个的旋转支撑部271~274为一顶点形成三角形的两个顶点位置以能够旋转的方式固定有各自的一端,而各自的另一端能够向以规定角度倾斜的方向旋转地固定于击球区支撑部100a,以分别设有通过分别向长度方向伸缩来实现对应分割板的倾斜的两个驱动致动器。
63.如上所述,使每个驱动致动器从击球区支撑部100a向上部的击球区部200倾斜规定角度而歪斜地设置且分别设置于分割板的三角形的两个顶点位置,并且,如上所述,每个分割板使旋转支撑部和两个驱动致动器分别具有三角形的设置位置,从而具有使每个分割板能够稳定地执行实现倾斜的动作,并且因歪斜地设置驱动致动器而能够降低高尔夫挥杆平台的设置高度的优点。
64.若对上述击球区地形实现驱动部400的构造更进一步进行分析,如图2和图3所示,可以构成为,将击球区支撑部100a划分为多个区域(110~150等),并在其中心区域110具备旋转支撑毂260,并且在所述击球区支撑部100a的中心区域110周边的多个区域(120~150)各固定两个驱动致动器,且使每个上端部向彼此远离的方向倾斜而设置,以使一区域稳定一驱动致动器的上端部和另一区域的一驱动致动器的上端部分别固定于一个分割板。从而,通过两个所述倾斜的驱动致动器中的每一个的长度方向的伸缩驱动,可以实现该对应分割板的倾斜。
65.即,如图2和图3所示,将击球区支撑部100a以包括中心区域110和其周边的第一区域120、第二区域130、第三区域140及第四区域150的方式划分为多个区域,并在在所述中心区域110固定设置旋转支撑毂260,在所述第一区域120以相邻的方式设置第八驱动致动器480及第一驱动致动器410的各下端,在所述第二区域130以相邻的方式设置第二驱动致动器420及第三驱动致动器430的各下端,在所述第三区域140以相邻的方式设置第四驱动致动器440及第五驱动致动器450的各下端,在所述第四区域150以相邻的方式设置第六驱动致动器460及第七驱动致动器470的各下端的状态下,所述第一驱动致动器410及第二驱动致动器420以分别倾斜的姿势使各自的上端固定于第一分割板210,以所述第三驱动致动器430及第四驱动致动器440分别倾斜的姿势使各自的上端固定于第二分割板220,以所述第五驱动致动器450及第六驱动致动器460分别倾斜的姿势使各自的上端固定于第三分割板230,以所述第七驱动致动器470及第八驱动致动器480分别倾斜的姿势使各自的上端固定于第四分割板240。
66.下面参照图4对上述驱动致动器410~480中的每一个及旋转支撑毂260的具体构造进行说明。图4的(a)示出上述驱动致动器的构造,图4的(b)示出上述旋转支撑毂的构造(图4的(a)中附了第一驱动致动器的附图标记,由于所有驱动致动器也具有与此相同的构造,因而在对图4的(a)进行说明时将省略"第一"部分进行说明)。
67.如图4的(a)所示,驱动致动器410可以构成为包括驱动电机411、通过所述驱动电机411进行动作的驱动缸412、基于所述驱动缸412的动作来进行直线方向的伸缩的伸缩部件413、凸出于所述伸缩部件413的相对侧的支撑轴部414、所述支撑轴部414以能够旋转的方式结合且固定于下部支撑部100上的下部固定部件415、以及以能够旋转的方式结合于所述伸缩部件413且固定于分割板210的下端的上部固定部件416。
68.随着所述驱动电机411正向旋转或逆向旋转,所述驱动缸412的伸缩部件413进行在长度方向上伸长或缩小的直线运动,随着所述伸缩部件413的长度方向的变化,驱动致动器410在相对于下部固定部件415和上部固定部件416分别旋转时所倾斜的角度会整体上发生变化。
69.两个驱动致动器410进行如上所述的动作,使得分割板可以实现多样的倾斜。
70.另一方面,如图4的(b)所示,旋转支撑毂260可以构成为包括具备于击球区部200
的中心部的毂轴部件261、支撑第一分割板210(参照图2)能够以与毂轴部件的中心轴ca垂直的两个轴n1、n2为中心分别旋转的第一旋转支撑部271、支撑第二分割板220(参照图2)能够以与中心轴ca垂直的两个轴为中心分别旋转的第二旋转支撑部272、支撑第三分割板230(参照图2)能够以与中心轴ca垂直的两个轴为中心分别旋转的第三旋转支撑部273、以及支撑第四分割板240(参照图2)能够以与中心轴ca垂直的两个轴为中心分别旋转的第四旋转支撑部274。
71.如图4的(b)所示,第一旋转支撑部271可以构成为包括以能够旋转的方式(以n1轴为中心的旋转)具备于毂轴部件261的第一旋转支撑轴281、以及以能够旋转的方式(以n2轴为中心旋转)具备于所述第一旋转支撑轴271且固定于第一分割板210的第一槽部201(参照图2)侧的第一旋转支撑固定部件291。
72.上述第一旋转支撑部271的构造与另外的旋转支撑部272~274的构造实质上相同。即,第二旋转支撑部272包括以能够旋转的方式具备于毂轴部件261的第二旋转支撑轴282、以及以能够旋转的方式具备于所述第二旋转支撑轴282且固定于第二分割板220的第二槽部202(参照图2)侧的第二旋转支撑固定部件292;第三旋转支撑部330包括以能够旋转的方式具备于毂轴部件261的第三旋转支撑轴283、以及以能够旋转的方式具备于所述第三旋转支撑轴283且固定于第三分割板230的第三槽部203(参照图2)侧的第三旋转支撑固定部件293;第四旋转支撑部340包括以能够旋转的方式具备于毂轴部件261的第四旋转支撑轴284、以及以能够旋转的方式具备于所述第四旋转支撑轴284且固定于第四分割板240的第四槽部204(参照图2)侧的第四旋转支撑固定部件294。
73.另一方面,所述毂轴部件261可以通过具备于击球区支撑部100a的中心部的毂驱动部490在上下方向上被驱动(参照图2)。
74.从而,所述旋转支撑部中的每一个可以固定于每个分割板的中心部侧以支撑每个所述分割板能够相对于毂轴部件以两轴方向为中心分别够旋转。对此,将参照图5进行说明。
75.如图5所示,第一分割板210是旋转支撑毂260侧的支撑点c(设置有上述第一旋转支撑部310的位置)、固定第一驱动致动器的上端的作用点a、以及固定第二驱动致动器的上端的作用点b的三角形的支撑结构(这与图3所示的连接第一旋转支撑部、第一驱动致动器以及第二驱动致动器的三角形的结构对应),并且可以以支撑点c为基准基于所述第一驱动致动器的动作使作用点a部分上下移动而实现倾斜,或基于第二驱动致动器的动作使作用点b部分上下移动而实现倾斜,或在所述作用点a和作用点b同时发生上下移动而实现倾斜,在每种情况下,上述毂驱动部490在上下方向上驱动毂轴部件261,使得支撑点c在垂直方向上移动,从而可以随着所述作用点a、b中的每一个上的移动实现多样的倾斜。
76.图5针对第一分割板210作为如上所述的支撑点c及作用点a、b的事项示出关于实现倾斜的三角形的支撑结构,由于也同样适用于其他分割板,因而针对其他分割板的说明将以关于所述第一分割板的支撑点c及作用点a、b的动作的说明代替,并省略重复的说明。
77.因此,本发明的一实施例的高尔夫挥杆平台的击球区部200可以通过如上所述的构造驱动分割板210~240中的每一个来实现多种多样的地形。
78.另一方面,如图2和图5所示,通过在彼此相邻的分割板之间分别形成以使间距朝向远离旋转支撑毂260侧的一侧变大的方式隔开的三角隔开部212、223、234、241,可以防止
相邻的两个分割板移动时彼此干涉的现象,因而可以提供能够以稳定且可靠的动作实现地形的挥杆平台。
79.另一方面,参照图2和图3对打击地形实现驱动部500的构造及利用其的打击部300的驱动进行说明。
80.如图2和图3所示,在下部支撑部100的打击支撑部100b上固定设置有多个致动器510~560作为打击地形实现驱动部500。
81.即,如图2和图3所示,第一致动器510和第二致动器520构成为以作用于打击部300上的一地点(称“作用点a”)的方式配置为三角形状;第三致动器530和第四致动器540构成为以作用于打击部300上的另一地点(称“作用点b”)的方式配置为三角形状;第五致动器550和第六致动器560构成为以作用于打击部300上的又一地点(称“作用点c”)的方式配置为三角形状。
82.上述作用点a、b、c对应于图5所示的打击部上的点。
83.即,打击地形实现驱动部500构成为,以在打击部300上形成三角形的三个顶点位置中的每一个为作用点a、b、c在所述作用点a、b、c中的每一个结合两个致动器的各自的一端部(上端部),而该两个致动器的各自的另一端部(下端部)分别结合于打击支撑部100b上彼此分离的位置,使得打击部300的所述作用点a、b、c中的每一个相对于打击支撑部100b被三角支撑,以在所述作用点a、b、c中的每一个实现对打击部300的倾斜。
84.每个所述致动器的具体构造可以与图4的(a)所示的驱动致动器的构造实质上相同。
85.若就基于如上所述的打击地形实现驱动部500的驱动的打击部300的动作参照图5,如前所述,打击部300上的作用点a是第一致动器510的上端和第二致动器520的上端同时施加驱动力的部分,作用点b是第三致动器530的上端和第四致动器540的上端同时施加驱动力的部分,作用点c是第五致动器550的上端和第六致动器560的上端同时施加驱动力的部分。
86.如此,在每个致动器在作用点a、b、c分别向上下方向施加驱动力时,可以多样地实现打击部300的倾斜。
87.此外,基于如上所述的每一对的致动器的动作,打击部300也可以向击球区部200侧位移sh的方式进行动作。
88.另一方面,参照图6对本发明的一实施例的高尔夫挥杆平台的控制系统进行说明。
89.如图6所示,高尔夫挥杆平台的控制部m构成为控制击球区地形实现驱动部400的第一驱动致动器410及第二驱动致动器420,第三驱动致动器430及第四驱动致动器440、第五驱动致动器450及第六驱动致动器460、第七驱动致动器470及第八驱动致动器480中的每一个;构成为控制打击地形实现驱动部500的第一致动器510及第二致动器520、第三致动器530及第四致动器540、第五致动器550及第六致动器560中的每一个;并且构成为控制能够上下驱动旋转支撑毂的毂驱动部490。
90.控制部m构成为以能够与虚拟高尔夫模拟装置的客户端700通信的方式连接并相互联系以执行控制。
91.客户端700利用对用户打击的球进行传感的传感装置800的传感信息来执行用于虚拟高尔夫模拟的各种数据处理,根据实施例,高尔夫挥杆平台的控制部m也可以利用所述
传感装置800的传感信息并基于该传感信息执行每个构成要素的控制。
92.下面参照图7对通过如上所述的构造的本发明的一实施例的高尔夫挥杆平台与虚拟高尔夫球场的地形信息联系起来实现倾斜的方法进行说明。
93.如图7所示,本发明的一实施例的高尔夫挥杆平台的控制部与实现对虚拟高尔夫球场v100的影像im且基于对用户打击的高尔夫球的传感装置的传感信息实现虚拟球在虚拟高尔夫球场v100上移动的模拟影像的客户端700联系以控制为实现打击部300和击球区部200的倾斜,并且利用以虚拟高尔夫球场v100上的放置虚拟球vb的位置为基准从对应于击球区部和打击部的区域(r200和r300)的地形信息计算出的打击部300的倾斜信息和击球区部200的倾斜信息来控制击球区地形实现驱动部400和打击地形实现驱动部500。
94.图7中关于虚拟高尔夫球场的影像im上的虚拟高尔夫球场v100地范围非常宽而多样,其中,以置有虚拟球vb的位置为基准以与预先知道的打击部300的区域对应的方式在虚拟高尔夫球场v100上规定打击部对应区域r300,并以虚拟球vb的位置为原点,基于所述打击部对应区域r300的地形信息,分别计算向横轴方向bo1的倾斜度(第一打击部倾斜度)和向纵轴方向bo2的倾斜度(第二打击部倾斜度),并将打击地形实现驱动部500控制为根据计算出的所述第一打击部倾斜度和第二打击部倾斜度信息来调节打击部300的倾斜。
95.就上述向横轴方向bo1的倾斜度而言,可以通过以原点为基准在横轴方向上以相互对应的方式设定两个坐标值(例如,设定为以原点为基准使右侧方向的坐标值与左侧方向的坐标值相互对应),并利用所设定的两个坐标值的差来求倾斜度;就向纵轴方向bo2的倾斜度而言,可以通过以原点为基准在纵轴方向上以相互对应的方式设定两个坐标值(例如,设定为以原点为基准使上方的坐标值和下方的坐标值相互对应),并利用所设定的两个坐标值的差来求倾斜度。
96.此时,在以虚拟球vb的位置为基准分别计算向横轴方向bo1的倾斜度和向纵轴方向bo2的倾斜度时,也可以以所述虚拟球vb的位置为原点定义以横轴方向为x轴,以纵轴方向为y轴,并且以垂直上方为z轴的相对坐标系来使上述倾斜度的计算变得容易。
97.利用以所述虚拟球vb的位置为原点计算向横轴方向bo1的倾斜度(第一打击部倾斜度)的倾斜度信息,可以通过打击部300上的b1位置处的上下驱动控制来实现其倾斜度,并且,利用以所述虚拟球vb的位置为原点计算向纵轴方向bo2的倾斜度(第二打击部倾斜度)的倾斜度信息,可以通过打击部300上的b2位置和/或b3位置处的上下驱动控制来实现其倾斜度。
98.此时,上述倾斜度的计算可以由客户端执行,并基于计算出的该倾斜度值由控制部m控制打击地形实现驱动部500,也可以从上述倾斜度的计算到基于倾斜度值的打击地形实现驱动部500的控制均由控制部m执行,并且也可以构成为让客户端700一同执行控制部m的作用。
99.若联系图5对如上所述的通过斜度信息实现打击部300的倾斜进行说明,例如,当向横轴方向bo1的倾斜度(第一打击部倾斜度)为相下倾斜的倾斜度时,通过照其维持图5所示的作用点a、b,并驱动作用点c部分向下下降,可以实现图7所示的以从打击部300上的b1位置向下下降的方式倾斜的倾斜。
100.例如,当向纵轴方向bo2的倾斜度(第二打击部倾斜度)为前方向下倾斜的倾斜度时,通过驱动图5所示的作用点a部分向下下降,可以实现图7所示的以从打击部300上的b2
位置向下下降的方式倾斜的倾斜。
101.作为又一实施例,在规定所述图7所示的打击部对应区域r300时,可以以实际置于打击部300上的高尔夫球的位置为基准来规定打击部对应区域r300。
102.即,优选将虚拟球vb的位置规定为以与实际置于打击部300上的高尔夫球的位置对应的方式使虚拟球vb位于打击部对应区域r300上,这可以利用通过传感装置(未图示)感测置于打击部300上的高尔夫球的位置的感测信息以与实际高尔夫球置于打击部上的位置对应的方式使置于虚拟高尔夫球场v100上的虚拟球vb位于打击部对应区域r300上来规定所述打击部对应区域r300。
103.另一方面,控制部m和/或客户端700预先知道用于规定实际打击部300和击球区部200的区域的信息(例如,打击部300和击球区部200的每个顶点的位置信息),并且可以通过传感装置的传感信息还知道高尔夫球的位置信息,由此可以以虚拟高尔夫球场v100上的虚拟球vb的位置为基准利用对应于击球区部的击球区部对应区域r200的原点坐标co(击球区部对应区域r200的中心点的坐标或对应于用户的重量中心点的位置的地点的坐标)信息容易地计算。
104.此外,可以以位于所述打击部对应区域r300的虚拟球vb的坐标值为基准将在击球区部对应区域r200隔开预先设定的距离的任意的位置的坐标点设定为击球区部对应区域r200的原点坐标co。
105.如上所述,击球区部对应区域r200的原点坐标co可以以与实际高尔夫球与击球区部的中心的距离对应的方式通过计算来算出,也可以将虚拟球vb的位置到原点co的距离预先设定为规定距离值,并利用该距离值来进行计算。
106.在如上所述地计算击球区部对应区域r200的原点co坐标后,可以以此为基准以与预先知道的击球区部的区域对应的方式规定击球区部对应区域r200,此时,既可以分别区分为与第一分割板210对应的区域r210、与第二分割板220对应的区域r220、与第三分割板230对应的区域r230以及与第四分割板240对应的区域r240而规定,也可以将对应于整体击球区部的区域的区域规定为击球区部对应区域r200。
107.控制部m和/或客户端700可以如上述所述地计算击球区部对应区域r200的原点坐标co的信息,并基于击球区部对应区域r200的地形信息分别计算向横轴的左侧方向so4的倾斜度(第四击球区部倾斜度)、向横轴的右侧方向so2的倾斜度(第二击球区部倾斜度)、向纵轴的前方so3的倾斜度(第三击球区部倾斜度)、以及向纵轴的后方so1的倾斜度(第一击球区部倾斜度)。
108.然后,控制部m可以通过与向所述纵轴的后方so1的倾斜度(第一击球区部倾斜度)对应地驱动第一分割板210与第二分割板220之间的高度(驱动s1位置的高度),与向所述横轴的右侧方向的倾斜度(第二击球区部倾斜度)对应地驱动第二分割板220与第三分割板230之间的高度(驱动s2位置的高度),与向所述纵轴的前方的倾斜度(第三击球区部倾斜度)对应地驱动第三分割板230与第四分割板240之间的高度(驱动s3位置的高度),与向横轴的左侧方向的倾斜度(第四击球区部倾斜度)对应地驱动第四分割板240与第一分割板210之间的高度(驱动s4位置的高度)来控制击球区部200的倾斜的实现。
109.在计算如上所述的第一至第四击球区部倾斜度时,也可以以所述击球区部对应区域的原点co位置为基准定义以横轴方向为x'轴,以纵轴方向为y'轴,并且以垂直上方为z'
轴的相对坐标系来使上述倾斜度的计算变得容易。
110.通过如上所述的方式,使得通过高尔夫挥杆平台的击球区部200的每个分割板的倾斜的实现和打击部300的倾斜的实现与虚拟高尔夫球场上放置虚拟球的位置的地形信息非常相似地进行,而用户在实现与虚拟高尔夫球场的放置虚拟球的位置的地形非常相似的地形的高尔夫挥杆平台上进行高尔夫击球,从而可以在比以往更动态的环境中进行高尔夫击球。
111.另一方面,关于本发明的一实施例的高尔夫挥杆平台的控制方法,尽管全包括在前述的内容中,但下面利用图8所示的流程图再次对其进行简要的说明。
112.随着开始利用虚拟高尔夫模拟装置等的高尔夫练习或虚拟高尔夫回合,客户端基于存储在数据存储部的地形信息实现对虚拟高尔夫球场的影像(s100)。
113.客户端可以以置于虚拟高尔夫球场上的虚拟球的位置为基准来规定打击部对应区域,并提取该规定的打击部对应区域的地形信息(s210)。
114.另外,客户端可以以置于虚拟高尔夫球场上的虚拟球的位置为基准来计算击球区部对应区域的原点,并以该原点为基准来规定击球区部对应区域,并且可以提取该规定的击球区部对应区域的地形信息(s310)。
115.这里,如前所述,打击部对应区域和击球区部对应区域可以通过以与关于对应于预先知道的打击部的区域和对应于击球区部的区域的信息(例如,各顶点的位置信息等)对应的方式规定虚拟高尔夫球场上的区域来获得,并且可以使虚拟球的位置与实际高尔夫球的位置对应来规定所述打击部对应区域和击球区部对应区域。
116.另一方面,客户端或控制部可以由在上述步骤s210提取到的打击部对应区域的地形信息以虚拟球的位置为原点在打击部对应区域上计算横轴方向的倾斜度和纵轴方向的倾斜度(s220)。
117.另外,客户端或控制部可以由在上述步骤s310中提取到的击球区部对应区域的地形信息计算击球区部对应区域上的原点,并以此为基准分别计算前、后、左、右四个方向的倾斜度(s320)。
118.可以基于在上述步骤s220中计算出的每个倾斜度,控制部可以控制打击地形实现驱动部以使高尔夫挥杆平台的打击部与虚拟高尔夫球场的虚拟球位置周边的地形相符地实现倾斜(s230)。
119.另外,基于在上述步骤s320中计算出的每个倾斜度,控制部可以控制击球区地形实现驱动部以与高尔夫挥杆平台的击球区部的各分割板的虚拟高尔夫球场的地形相符地分别实现倾斜(s330)。
120.如上所述,通过本发明的一实施例的高尔夫挥杆平台的控制方法,可以使通过击球区部200的每个分割板的倾斜的实现和打击部300的倾斜的实现与虚拟高尔夫球场上放置虚拟球的位置的地形信息非常相似地进行。
121.另一方面,在如上所述地实现击球区部和打击部的倾斜的过程中,可能会发生击球区部与打击部之间的距离变宽的情况。
122.即,如图9的(a)所示,在高尔夫挥杆平台的击球区部200和打击部300未实现倾斜的状态下,如上所述地与虚拟高尔夫球场的地形信息联系起来计算每个位置处的倾斜度信息以基于所述倾斜度信息实现击球区部200和打击部300的倾斜,从而可能如图9的(b)所示
击球区部200与打击部300之间的距离变宽而发生间隙g。
123.控制部可以基于构成击球区地形实现驱动部400和打击地形实现驱动部500的每个驱动致动器和致动器的控制信息来预先设定可能发生如上所述的间隙g的情况的信息,在如此基于预先设定的范围的信息来执行控制的情况下,可以控制打击地形实现驱动部500以控制为使打击部300向击球区部200侧位移,以防止发生所述间隙g。
124.即,判断是否对应于如图9的(b)所示击球区部200与打击部300之间的距离变宽而发生间隙g的控制信息,当判断为是预先设定的控制信息时,通过如图9的(c)所示将打击地形实现驱动部500控制为发生位移sh,可以防止发生如上所述的间隙g。
125.即,当对击球区部的每个倾斜度的信息为可能发生如上所述的间隙g的范围的信息时,可以在原来的控制信息中包括关于如上所述的位移sh的控制信息来控制打击地形实现驱动部,也可以在发生上述间隙g之后判断间隙g的发生与否并控制为进行上述位移sh。
126.通过这样的打击部300的位移sh的控制,使得高尔夫挥杆平台能够进行稳定且可靠性较高的动作。
127.产业上的利用可能性
128.本发明的分割驱动型挥杆平台可以利用于高尔夫练习相关的产业领域及以虚拟的高尔夫模拟为基础进行高尔夫比赛的所谓的荧幕高尔夫产业领域等。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。