1.本发明涉及坐标方位技术领域,尤其涉及一种大地坐标在不同空间直角坐标系中的坐标转换方法。
背景技术:
2.世界上任何一个物体都是独立存在的,每个物体都有属于自己的局部坐标系,用来描述各自内部的位置关系,当将众多不相关的物体联系在一起时,就会形成多坐标系,此时就需要提供一个用来整合的全局坐标系,全局坐标系与局部坐标系之间的坐标转换目前受到广泛重视,越来越多的方法被用来解决该问题。
3.随着坐标系统的不断完善和改进,各地的大地坐标值可以通过众多方法转换为用户需要的特定坐标值。在大地测量方面,勘测者往往会遇到在勘测点无法架构仪器的情况,于是就需要用到等价替换的思想,重新选取勘测点并构建坐标系,测量原勘测点和物体的坐标,通过转换方法计算原勘测点坐标系中物体的坐标。
4.目前,现有技术中大多不同空间直角坐标系中物体坐标转换的方法有:例如(赵建军、陈滨、杨利斌.基于四元数的大地坐标转换算法及实现),利用四元数表示物体坐标点绕轴旋转的特征,实现在同一地球椭球上不同空间直角坐标系中坐标转换的功能。例如(cn201110385567.1一种判定飞行航路偏离的方法),利用三维立体几何和空间直角坐标结合的算法,求解各项参数。上述两种方法虽然都能够对坐标进行转换,但在转换各式各样坐标系坐标方面存在一定局限性,两者对坐标系转换的过程不直观,不能实时改变参数,且后者计算量大,容易出现误差,测量效率较低。
5.现有技术中采用绕x、y、z三轴旋转,三轴旋转围绕的都是坐标系初始状态下的三个轴,坐标系位姿每改变一次,其获取的角度值就存在一定偏差,对最终结果具有一定影响。
技术实现要素:
6.针对现有算法的不足,本发明提供一种将某点的大地坐标转换为空间直角坐标并在不同空间坐标系表示的方法,在catia软件中直观实时地获取坐标系转换角度,并显示整个转换过程,利用欧拉角旋转矩阵算法,简化模型,实现坐标系多样化,减少计算量,提高测量精度和效率。
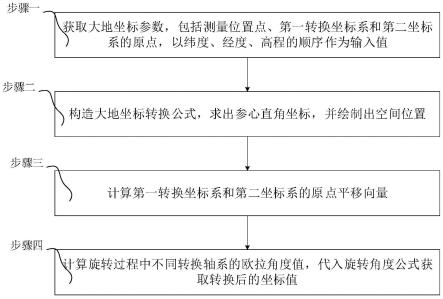
7.本发明所采用的技术方案是:一种大地坐标在不同空间直角坐标系中的坐标转换方法包括以下步骤:
8.步骤一、获取大地坐标参数,包括测量位置点、第一转换坐标系和第二坐标系的原点,以纬度、经度、高程的顺序作为输入值;
9.采用大地坐标系统,获取参考椭球的长短半轴和第一偏心率,并计算卯酉圈半径,卯酉圈半径为:
10.11.其中,a为长半轴,e为第一偏心率,a为所求点大地纬度;
12.测量位置点和两个原点的坐标以大地坐标(a,b,h)形式表示。
13.某个点的大地坐标作为输入值有正负之分,将椭球体地球分为东西南北四个半球,规定东经和北纬为正值,反之为负值。
14.步骤二、构造大地坐标转换公式,求出参心直角坐标,并绘制出空间位置;
15.进一步的,详细包括:
16.s21、通过大地坐标转换将大地坐标转为参心直角坐标;
17.大地坐标转换公式为:
[0018][0019]
其中,(x,y,z)为参心直角坐标,(a,b,h)为大地坐标,r为卯酉圈半径,e为第一偏心率。
[0020]
大地坐标系和用户规定坐标系的转换是抽象、无法直观地呈现的,通过 catia软件直观表达不同坐标系统的转换过程;
[0021]
catia软件可以绘制指定要求坐标系,并根据需求改变坐标系统的参数从而改变坐标系位姿,并通过程序模拟坐标系统之间的转换过程,直观形象地呈现出坐标的转换过程;
[0022]
s22、在catia中绘制参心直角坐标系、第一转换坐标系和第二坐标系;
[0023]
在catia中新建part文件,创建系统默认轴系,将该轴系规定为参心直角坐标,原点为地心,以z轴法线视图为基准,此时z轴正向指向屏幕,水平向右为y轴正向,竖直向下为x轴正向,该轴系即为参心直角坐标,也是参照坐标系;将该轴系x、y轴的正向指向依次规定为正东、正北方位,用于后续坐标系的创建;
[0024]
s23、以参心直角坐标系为参照,绘制测量位置点、第一转换坐标系和第二坐标系的原点坐标;
[0025]
获取测量位置点与两个转换坐标系原点坐标,根据大地坐标转换公式将大地坐标转换为空间直角坐标,以参心直角坐标系为基准,绘制三个点对应的空间位置;
[0026]
步骤三、计算第一转换坐标系和第二坐标系的原点平移向量;
[0027]
测量两坐标系原点在catia创建的参照轴系中坐标值,其中第一坐标系原点坐标为(x1,y1,z1),第二坐标系原点坐标为(x2,y2,z2);
[0028]
将两原点平移距离l以向量表达,将第一、第二坐标系原点作为输入值,求的平移向量,公式为:
[0029]
l=(x
1-x2,y
1-y2,z
1-z2)
ꢀꢀꢀꢀ
(3)
[0030]
其中,空间中点的平移量是矢量,具有正负方向,正负方向由平移主体决定。
[0031]
步骤四、计算旋转过程中不同转换轴系的欧拉角度值,代入旋转角度公式获取转换后的坐标值;
[0032]
进一步的,具体包括:
[0033]
s41、catia中将第一坐标系和第二坐标系移至参心直角坐标系,使三个轴系共原点;
[0034]
s42、在参心直角坐标系下获得第一坐标系和第二坐标系的三个轴的单位方向向量,分别表示为:(a1,b1,c1)、(a2,b2,c2)、(a3,b3,c3)和(a4, b4,c4)、(a5,b5,c5)和(a6,b6,c6);
[0035]
进一步的,三个轴表示为:xyx或xzx或yxy或yzy或zxz或zyz与对应平面的交线n;
[0036]
任意两个空间向量夹角的取值范围为0
°
至180
°
;正负方向时,取值范围为
ꢀ‑
180
°
至180
°
;
[0037]
s43、根据空间向量夹角的余弦公式分别求出两个轴系的旋转角度值;
[0038]
进一步的,绕三个轴旋转角度公式分别为:
[0039][0040][0041][0042]
其中,α、β、γ分别为绕三个轴旋转角度值,规定以右手坐标系为标准,逆时针旋转为正;
[0043]
s44、不同坐标系的坐标转换方程是以欧拉角为基础,构建空间旋转矩阵,公式分别为:
[0044]
绕x轴旋转:
[0045][0046]
其中,r
x
(α)表示绕x轴旋转α角;
[0047]
绕y轴旋转:
[0048][0049]
其中,ry(β)表示绕y轴旋转β角;
[0050]
绕z轴旋转:
[0051][0052]
其中,rz(γ)表示绕z轴旋转γ角;
[0053]
齐次平移矩阵为:
[0054][0055]
其中,a
x
、ay、az为平移向量;
[0056]
s45、通过不同坐标系的旋转矩阵和平移向量构造的齐次平移矩阵得到测量位置点,测量位置点的坐标值公式为:
[0057]
p
′
=rz(γ)
·rx
(β)
·rz
(α)
·
t
·
p
ꢀꢀ
(8)
[0058]
其中,p为测量位置点坐标值构成的齐次矩阵,p
′
为转换后新坐标系下坐标值构成的齐次矩阵。
[0059]
本发明的有益效果:
[0060]
1、仅需提供各点的大地坐标以及两个转换坐标系这三个参数,即可实现坐标的空间转换;基于欧拉角的旋转方式,使坐标系更加灵活多变,可以构造任意坐标系并求出点在坐标系中坐标值;便于将真实场景转换至虚拟三维空间中观察分析;通过空间相对位置关系,有效解决测量点无法架构仪器测量坐标点的问题,大大提高工作效率,节约成本,缩短工期进程。
[0061]
2、本发明的双轴旋转方式仅需选取坐标系的两个轴,且都是围绕坐标系位姿每次改变后的新轴旋转,获取最新旋转姿态角度值,在减少计算量的同时保证最终结果计算的精确性。
附图说明
[0062]
图1是本发明的大地坐标在不同空间直角坐标系中的坐标转换方法流程图;
[0063]
图2是本发明的坐标系在catia中的表示图;
[0064]
图3是本发明的不同空间坐标系的欧拉角旋转图;
[0065]
图4是本发明各城市在创建的日喀则坐标系中分布图;
[0066]
图5是本发明各城市在创建的天津坐标系中分布图。
具体实施方式
[0067]
下面结合附图和实施例对本发明作进一步说明,此图为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
[0068]
如图1所示,一种大地坐标在不同空间直角坐标系中的坐标转换方法包括以下步骤:
[0069]
步骤一、如图2:获取大地坐标参数,包括测量位置点p1和第一转换坐标系原点p2和第二转换坐标系原点p3,将位置点和原点的方位坐标存储在文件中,以纬度、经度、高程的顺序依次作为输入值。
[0070]
步骤二、构造大地坐标转换公式,求出参心直角坐标,并绘制出空间位置;
[0071]
详细包括:
[0072]
s21、通过转换方程将大地坐标转为参心直角坐标;
[0073]
s22、catia中绘制参心直角坐标系、第一转换坐标系和第二坐标系
[0074]
s23、以参心直角坐标系为参照,绘制测量位置点、第一转换坐标系和第二坐标系的原点坐标;
[0075]
步骤三、计算第一转换坐标系和第二坐标系的原点平移向量;
[0076]
步骤四、计算旋转过程中不同转换轴系的欧拉角度值,代入旋转角度公式获取转换后的坐标值;
[0077]
s41、catia中将第一坐标系和第二坐标系移至参心直角坐标系,使三个轴系共原点;
[0078]
s42、在参心直角坐标系下获得第一坐标系和第二坐标系的三个轴zxz的单位方向向量;
[0079]
其中,欧拉角的测量方式如图3所示,本实施例的三个轴以zxz为例说明; x-y-z为待转轴,x-y-z为目的轴,两个轴系各自x-y(x-y)平面的交线为n,采用绕双轴旋转方式的欧拉角值测量步骤为:绕z轴旋转α,待转轴x轴与交线 n重合;以旋转后的待转轴新位置为基准,绕其x轴旋转β,使z轴和z轴重合;以旋转后待转轴新位置为基准,绕其z轴旋转γ,实现不同位置坐标系的重合,规定逆时针旋转为正;双轴中间轴的选取根据实际情况设定,其中某一轴旋转发生死锁的情况下,自动选取另一轴,应对多种无法转换情况的发生。
[0080]
s43、根据空间向量夹角的余弦公式分别求出两个轴系的旋转角度值;
[0081]
s44、不同坐标系的坐标转换方程是以欧拉角为基础,构建空间旋转矩阵;
[0082]
s45、通过不同坐标系的旋转矩阵和平移向量构造的齐次平移矩阵得到测量位置点。
[0083]
实验过程:
[0084]
选择大地坐标系为wgs-84坐标系,并设定参心直角坐标系:
[0085]
选择中国海拔最高和最低的城市作为坐标系的原点,获取日喀则和天津大地坐标值以及获取世界各中心城市的大地坐标值作为参考位置点;其中日喀则大地坐标为(29
°
263792
′
,88
°
884874
′
,3836),天津大地坐标为(39
°
02
′
,117
°
12
′
, 3.3);
[0086]
本实验过程中,在日喀则(图3中p2)创建的坐标系与参心直角坐标系仅存在平移关系,即构成空间夹角的向量都为同向单位向量;在天津(图3中p3) 创建的坐标系为任意方向坐标系;
[0087]
通过大地坐标转换公式将天津和日喀则以及其他城市的大地坐标值转为空间直角坐标;
[0088]
根据不同坐标系选用相应的欧拉角旋转方式,本实施例中采用双轴旋转方式(zxz),坐标系的相对位移用含有平移向量的平移矩阵表示,坐标系的相对姿态变换用含有欧拉角的空间旋转矩阵表示,欧拉角α、β、γ值分别为38.56
°
、
ꢀ‑
60.89
°
、6.61
°
;
[0089]
通过空间旋转矩阵将其他城市在天津和日喀则坐标系中表示;
[0090]
以北京作为参考测量位置点(图3中p1),将北京的大地坐标分别转换为日喀则和天津创建的直角坐标系中;
[0091]
分别得出北京在wgs-84坐标系中的大地坐标转换为日喀则创建坐标系中坐标值为x:-1760465m,y:6050566m,z:-2055874m;转换为天津创建坐标系中坐标值为x:42637m,y:-108224m,z:-28730m;
[0092]
如图4为分别选取上海、香港、澳门、广州、重庆、北京为参考测量位置点时,在大地
坐标转换为日喀则坐标系中的位置;
[0093]
如图5为分别选取上海、香港、澳门、广州、重庆、北京为参考测量位置点时,在大地坐标转换为天津坐标系中的位置。
[0094]
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。