技术特征:
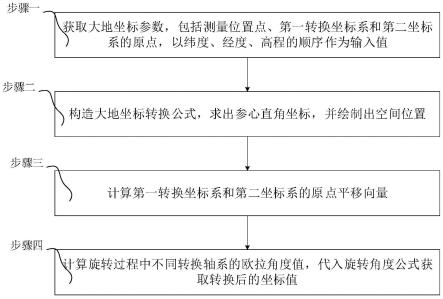
1.一种大地坐标在不同空间直角坐标系中的坐标转换方法,其特征在于,包括以下步骤:步骤一、获取大地坐标参数,包括测量位置点、第一转换坐标系和第二坐标系的原点,以纬度、经度、高程的顺序作为输入值;步骤二、构造大地坐标转换公式,求出参心直角坐标,并绘制出空间位置;步骤三、计算第一转换坐标系和第二坐标系的原点平移向量;步骤四、计算旋转过程中不同转换轴系的欧拉角度值,代入旋转角度公式获取转换后的坐标值。2.根据权利要求1所述的大地坐标在不同空间直角坐标系中的坐标转换方法,其特征在于,步骤二详细包括:s21、通过大地坐标转换将大地坐标转为参心直角坐标;s22、在catia中绘制参心直角坐标系、第一转换坐标系和第二坐标系;s23、以参心直角坐标系为参照,绘制测量位置点、第一转换坐标系和第二坐标系的原点坐标。3.根据权利要求1所述的大地坐标在不同空间直角坐标系中的坐标转换方法,其特征在于,大地坐标转换的公式为:其中,(x,y,z)为参心直角坐标,(a,b,h)为大地坐标,r为卯酉圈半径,e为第一偏心率。4.根据权利要求1所述的大地坐标在不同空间直角坐标系中的坐标转换方法,其特征在于,步骤四详细包括:s41、catia中将第一坐标系和第二坐标系移至参心直角坐标系,使三个轴系共原点;s42、在参心直角坐标系下获得第一坐标系和第二坐标系的三个轴的单位方向向量;s43、根据空间向量夹角的余弦公式分别求出两个轴系的旋转角度值;s44、不同坐标系的坐标转换方程是以欧拉角为基础,构建空间旋转矩阵;s45、通过不同坐标系的旋转矩阵和平移向量构造的齐次平移矩阵得到测量位置点。5.根据权利要求4所述的大地坐标在不同空间直角坐标系中的坐标转换方法,其特征在于,三个轴表示为:xyx或xzx或yxy或yzy或zxz或zyz与对应平面的交线n。6.根据权利要求4所述的大地坐标在不同空间直角坐标系中的坐标转换方法,其特征在于,旋转角度公式分别为:在于,旋转角度公式分别为:在于,旋转角度公式分别为:其中,α、β、γ分别为绕三个轴旋转角度值,(a1,b1,c1)、(a2,b2,c2)、(a3,b3,c3)、(a4,b4,c4)、(a5,b5,c5)、(a6,b6,c6)为第一坐标系和第二坐标系的三个轴的单位方向向量。
7.根据权利要求4所述的大地坐标在不同空间直角坐标系中的坐标转换方法,其特征在于,空间旋转矩阵的公式为:绕x轴旋转:其中,r
x
(α)表示绕x轴旋转α角;绕y轴旋转:其中,r
y
(β)表示绕y轴旋转β角;绕z轴旋转:其中,r
z
(γ)表示绕z轴旋转γ角。8.根据权利要求4所述的大地坐标在不同空间直角坐标系中的坐标转换方法,其特征在于,测量位置点的坐标值公式为:p
′
=r
z
(γ)
·
r
x
(β)
·
r
z
(α)
·
t
·
p
ꢀꢀꢀꢀ
(8)其中,p为测量位置点坐标值构成的齐次矩阵,p
′
为转换后新坐标系下坐标值构成的齐次矩阵,r
z
(γ)表示绕z轴旋转γ角,r
x
(β)表示绕x轴旋转β角,r
z
(α)表示绕z轴旋转α角,t表示齐次平移矩阵。
技术总结
本发明涉及坐标方位技术领域,尤其涉及一种大地坐标在不同空间直角坐标系中的坐标转换方法,包括获取大地坐标参数,包括测量位置点、第一转换坐标系和第二坐标系的原点,以纬度、经度、高程的顺序作为输入值;构造大地坐标转换公式,求出参心直角坐标,并绘制出空间位置;计算第一转换坐标系和第二坐标系的原点平移向量;计算旋转过程中不同转换轴系的欧拉角度值,代入旋转角度公式获取转换后的坐标值。本发明在CATIA软件中直观实时地获取坐标系转换角度,并显示整个转换过程,利用欧拉角旋转矩阵算法,简化模型,实现坐标系多样化,减少计算量,提高测量精度和效率。提高测量精度和效率。提高测量精度和效率。
技术研发人员:李一芒 高浩
受保护的技术使用者:常州大学
技术研发日:2022.07.08
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。