连接器接口的对准
1.相关申请的交叉引用
2.本技术要求于2020年3月13日提交的题为“alignment of an optical fiber interface(光纤接口的对准)”的美国临时专利申请号62/989,498的优先权,其公开内容通过引用整体并入本文。
技术领域
3.本技术总体上涉及连接器的对准,更具体地,涉及辅助连接器对准和/或减少在非永久性连接接头处的颗粒形成。
背景技术:
4.微创医疗技术旨在减少在医疗程序期间受损的组织量,从而减少患者恢复时间、不适和有害副作用。这种微创技术可以通过患者解剖结构中的自然孔口或通过一个或多个手术切口来执行。操作员(例如,医师)可以通过这些自然孔口或切口插入微创医疗器械(手术、诊断、治疗、活检器械等)以到达目标组织位置。一种这样的微创技术是使用柔性和/或可操控的细长设备,例如柔性导管,该设备可以插入到解剖通道中并朝向患者解剖结构内的感兴趣区域导航。操作员对这种细长设备的控制涉及若干自由度的管理,至少包括细长设备相对于患者解剖结构的插入和缩回的管理,以及设备的操控。
5.可以使用包括光纤、同轴导体、铜导体、双绞线对等在内的各种电缆在医疗系统的部件之间传输通信信号。可以使用各种连接器来执行通信电缆的连结。当使用用于通信信号的光纤时,希望通过以光纤芯的精确对准使光纤的切割端处的面邻接来形成低损耗接头。对于光纤的非永久性连接器,光纤的切割端通过机械力保持对准。光纤线缆传输的信号会因接头处的配合面之间的污染而劣化。因为颗粒嵌入光纤面中,形成具有这种污染的光纤连接会随着时间的推移对光纤面造成损坏,并导致永久性性能下降。
技术实现要素:
6.根据本技术的实施例,提供了一种浮动连接器接口。浮动接口通常包括具有槽的保持支架、与保持支架滑动关联的平移插座以及定位在保持支架和平移插座之间的偏压元件。平移插座可以包括延伸到槽中以允许平移插座相对于保持支架平移的凸片部分,以及被配置为接收托架连接器的孔。平移插座的平移可以被限制在浮动平面内,并且偏压元件可以被配置为抵抗平移插座的平移。
7.根据本技术的另一个实施例,提供了一种托架。滑架通常包括具有槽的保持支架、与保持支架滑动关联的平移插座、具有外壳的支架连接器,该外壳可以可移除地耦合到平移插座中的孔,以及定位在保持支架和平移插座之间的偏压元件。平移插座可以包括延伸到槽中以允许平移插座相对于托架平移的凸片部分,其中平移可以被限制在浮动平面内。偏压元件可以被配置为抵抗平移插座的平移,并且器械连接器插入托架连接器的方向可以垂直于浮动平面。
8.根据本技术的另一个实施例,提供了一种连接器对准装置。连接器对准装置通常包括具有托架光纤连接器的托架、配置成可移除地保持器械接口对准以连接到托架的板、以及耦合在板和托架之间的伸缩支座。该板可以具有被配置为接收器械光纤连接器的孔,并且该伸缩支座可以可操作以将板定位在板与托架间隔开的第一方位,并且将板定位在板与托架相邻的第二方位。
9.根据本技术的另一个实施例,提供了一种对准系统。对准系统通常包括具有外壳和托架光纤连接器的托架、具有外表面和器械光纤连接器的器械接口,器械光纤连接器配置成当器械接口与托架配合时连接到托架光纤连接器,以及从托架的外壳突出的对准翼梁。对准翼梁可以具有对应于器械接口的外表面的形状并且可以被配置为对准器械接口和托架,使得器械光纤连接器与托架光纤连接器对准。
10.根据本技术的另一个实施例,提供了一种器械。该器械通常包括器械接口和从器械接口突出的器械光纤连接器。器械光纤连接器可包括具有配置成与托架光纤连接器对接的外表面的连接器主体,以及定位在连接器主体的远端部分上的锥形运动学表面。锥形运动学表面可以从连接器主体的外表面向下渐缩到连接器主体的尖端。锥形运动学表面可以被配置为在器械接口的安装期间对准器械光纤连接器和托架光纤连接器。
11.提供该发明内容以便以简化形式介绍概念的选择,这些概念将在下面的具体实施方式中进一步描述。本发明内容不旨在识别所要求保护的主题的关键特征,也不旨在用作确定所要求保护的主题的范围的帮助。
附图说明
12.参考以下附图可以更好地理解本技术的许多方面。附图中的部件不一定按比例绘制。相反,重点放在清楚地说明本技术的原理上。此外,部件可以在某些视图中显示为透明,仅是为了说明的清楚,而不是表示部件必须是透明的。部件也可以示意性地示出。
13.图1a是根据本技术的实施例配置的医疗系统的简化图。
14.图1b是图1a的医疗系统的结构表示图的透视图。
15.图2a和图2b是图1b的医疗系统的操纵器组件和医疗器械的左侧视图。
16.图3是图1b的远程操作医疗系统的托架的透视图,示出了托架光纤连接器。
17.图4a是根据本技术的实施例配置的图1b的医疗系统的载体光纤连接器和浮动光纤接口的透视图。
18.图4b是图4a的浮动光纤接口的横截面平面图。
19.图4c和图4d是图4a的载体光纤连接器的透视图。
20.图4e和图4f是图4a的载体光纤连接器的横截面侧视图,示出了定位在连接器井的至少一侧上的减摩辊。
21.图5是根据本技术的实施例配置的图1b的医疗系统的载体光纤连接器和浮动光纤接口的透视图。
22.图6是从根据本技术的实施例配置的图1b的操纵器组件的托架延伸的平移对准板的透视图。
23.图7a和图7b分别是根据本技术的实施例配置的图1b的操纵器组件的对准翼梁的透视图和平面图。
24.图7c和图7d是图7a和图7b的对准翼梁的平面图,示出了一个或多个时钟特征的实施例。
25.图8是图1b的医疗系统的医疗器械的器械光纤连接器的透视图,该器械光纤连接器具有根据本技术的实施例配置的锥形运动学表面。
26.本技术的实施例及其优点通过参考下面的详细描述得到最好的理解。应当理解,相似的附图标记用于标识在一幅或多幅图中图示的相似元件,其中示出的目的是为了说明本公开的实施例而不是为了限制本公开的实施例。
具体实施方式
27.本技术一般涉及连接器接口的对准,例如,在光纤的末端之间以减少在非永久性光纤连接接头处的颗粒形成。各种医疗系统可以包括被配置为接收定位在一个或多个模块化医疗器械上的光纤连接器的光纤连接器。为了帮助插入光纤连接器,系统连接器可以设计成在多个自由度上具有容错性,并且操作员在安装过程中不需要完美地对准器械。在安装过程中防止连接器错位可以减少损坏光纤的可能性,产生更少的污染物,并允许光纤的末端进行正确和完整的连接。
28.本公开根据它们在三维空间中的状态来描述各种器械和器械的部分。如本文所用,术语方位指的是对象或对象的一部分在三维空间(例如,沿笛卡尔x-坐标、y-坐标和z-坐标的三个平移自由度)中的位置。如本文所用,术语取向指的是对象或对象的一部分的旋转放置(例如,三个旋转自由度,例如滚动、俯仰和偏航)。如本文所用,术语姿势指的是对象或对象的一部分在至少一个平移自由度中的方位,以及该对象或对象的一部分在至少一个旋转自由度(例如,高达六个总自由度)中的取向。如本文所用,术语形状指的是沿对象测量的一组姿势、方位或取向。
29.图1a是医疗系统(“系统100”)的简化图,图1b是根据本技术的实施例配置的系统100的透视图。系统100可适用于手术、诊断、治疗或活检程序等。尽管本文针对此类程序描述了系统100的一些实施例,但对特定医疗或手术器械和医疗或手术方法的引用并不旨在限制本技术的范围。本文所述的系统、器械和方法可以用于人类、动物、人类尸体、动物尸体、人类或动物解剖结构的部分和/或非手术诊断,以及工业系统和通用机器人或远程操作系统。
30.如图1a和图1b所示,系统100通常包括具有器械操纵器120(参见图1b)的操纵器组件102,以在对患者p执行各种程序的同时操纵医疗器械104。操纵器组件102可以是远程操作的、非远程操作的或混合远程操作的和非远程操作的组件,具有可以是机动和/或远程操作的选择运动自由度,以及可以是非机动和/或非远程操作的选择运动自由度。操纵器组件102可以安装到手术台t或主支撑件114(例如可移动推车、支架、第二台等)。该系统可以包括主控制器106,其被配置为允许操作员o(例如,外科医生、临床医生、医师等)观察介入部位并控制操纵器组件102。
31.系统100的主控制器106可位于手术台t附近或与手术台t位于同一房间内。在一些实施例中,例如,主控制器106定位在患者p所在的手术台t的侧面附近。然而,应该理解的是,操作员o可以位于不同的房间或远离患者p的任何距离。主控制器106通常包括一个或多个输入和控制设备(未示出),用于通过器械操纵器120控制医疗器械104。输入和控制设备
可以包括任何数量的各种输入设备,诸如操纵杆、轨迹球、数据手套、扳机枪、手动控制器、语音识别设备、身体运动或存在传感器等。输入和控制设备可以具有与相关联的医疗器械相同的自由度,以利用操作员o在直接控制类似器械时的熟悉度。在这点上,控制设备可以为操作员o提供远程呈现(telepresence)或控制设备与医疗器械成一体的感觉。然而,输入和控制设备可以具有比相关联的医疗器械104更多或更少的自由度,并且仍然为操作员o提供远程呈现。在一些实施例中,控制设备可以可选地是以六个自由度移动的手动输入设备,并且该手动输入设备还可以包括用于致动器械(例如,用于闭合抓爪、向电极施加电势、递送药物治疗等)的可致动手柄。
32.主控制器106的输入和控制设备可以包括滚轮和轨迹球。在系统100的示例实施方式中,滚轮可以向前或向后滚动以便控制医疗器械104相对于患者解剖结构的前进或缩回,并且操作员o可以在各个方向上滚动轨迹球以操控医疗器械104的远端部分和/或远侧尖端的方位,例如,以控制弯曲或关节运动/铰接(articulation)。与运动控制台相关的各种系统和方法在pct公开号2019/027922(提交于2018年7月30日,标题为“systems and methods for safe operation of a device”)和美国专利公开号2019/0029770(提交于2018年7月30日,标题为“systems and methods for steerable elongate device”)中进行了描述,以上专利申请全部内容通过引用并入本文。
33.如图1b所示,器械操纵器120可以被配置为支持和操纵医疗器械104,医疗器械104具有一个或多个非伺服控制连杆(例如,可手动定位并锁定到位的一个或多个连杆,通常称为设置结构(sus))和/或一个或多个伺服控制连杆(例如,可响应命令而控制的一个或多个动力连杆)的运动学结构。器械操纵器120可以包括响应于来自控制系统112的命令驱动医疗器械104上的输入的多个致动器或马达。致动器可以包括当耦合到医疗器械104时可以推进医疗器械104到患者p中自然或手术产生的解剖孔口中的驱动系统。在一些实施例中,运动学结构可以被锁定在适当位置或解锁以由操作员o与开关、按钮或其他类型的输入设备交互来手动操纵。
34.器械操纵器120可以被配置为将医疗器械104定位在相对于患者解剖结构或其他医疗设备的最佳方位和取向。在这点上,驱动系统可以包括在器械操纵器120中以根据任何预期的自由度移动医疗器械104的远端,这可以包括三个线性运动度(例如,沿x、y和/或z笛卡尔轴的线性运动)和三个旋转运动度(例如,围绕x、y和z笛卡尔轴的旋转)。另外,致动器可用于致动医疗器械104的可铰接末端执行器(未示出),以用于抓握活检设备或类似物的钳口中的组织。致动器位置传感器,诸如解算器、编码器、电位计和其他机构,可以向系统100提供描述器械操纵器120的马达轴的旋转和取向的传感器数据。这样的位置传感器数据可以用于确定由致动器操纵的对象的运动。
35.在一些实施例中,最佳位置和取向可以包括操纵器组件102相对于患者p的解剖结构的对准,例如以最小化定位在患者p的解剖结构内的医疗器械104的摩擦(例如,在解剖开口、患者脉管系统、患者腔内通道等中)或与患者解剖结构耦合的医疗设备(例如插管、套管针、气管导管(ett)、喉部食管面罩(lma)等)内。操纵器组件102的最佳位置和取向可以附加地或替代地包括通过将各种医疗工具(诸如针、抓握器、手术刀、夹子、消融探针、可视化探针等)与医疗器械104一起使用时,提供足够的工作空间和/或对医疗器械104的人体工程学访问来优化操作员o的人体工程学。
36.操纵器组件102的每次调整(例如,插入、旋转、平移等)可以通过机器人控制或通过操作员o的手动干预来致动。例如,每次旋转或线性调整可以通过使用制动器而被保持在固定配置中。在这点上,一个或多个按钮和开关的按下释放一个或多个对应的制动器,允许操作员o通过器械操纵器120的定位来手动定位医疗器械104。一个或多个调整也可以由一个或多个致动器(例如,马达)控制,使得操作员可以使用按钮或开关来致动马达,从而以期望的方式改变操纵器组件102,从而将操纵器组件102定位在最佳方位和取向。在一些实施例中,操纵器组件102的机器人控制可以通过激活按钮或开关来致动。在一个示例中,按钮或开关的一个方位可以启动操纵器组件102在第一旋转方向上的动力旋转,并且按钮或开关的另一个方位可以启动操纵器组件102在另一个方向上的动力旋转。
37.操纵器组件102可以被配置为使得当按钮或开关被激活时,操作员o可以沿着对应于插入或缩回医疗器械104的线性路径调整器械操纵器120。出于安全目的,操纵器组件102可能只能在一个平移方向(例如缩回)上手动移动,并且可能不能在医疗器械104的插入方向上手动移动,以防止操作员o无意或不合需要地将医疗器械推进到患者o的解剖结构中。
38.如图1a所示,系统100可以包括具有一个或多个子系统的传感器系统108,用于接收关于耦合到器械操纵器120的器械的信息。这样的子系统可以包括方位/位置传感器系统(例如,电磁(em)传感器系统);形状传感器系统,用于确定远端和/或沿着可构成医疗器械104的一部分的柔性主体的一个或多个段的方位、取向、速率、速度、姿势和/或形状;和/或可视化系统,用于在其他可能的传感器中从医疗器械104的远侧部分捕获图像。
39.再次一起参考图1a和图1b,系统100还可以包括显示系统110,用于显示在手术前或手术中记录的传感器系统108生成的手术部位和医疗器械104的图像或表示图。显示系统110可以使用来自成像技术的图像数据和/或实时图像,成像技术诸如计算机断层摄影术(ct)、磁共振成像(mri)、荧光检查、温度记录法、超声、光学相干断层摄影术(oct)、热成像、阻抗成像、激光成像、纳米管x射线成像、内窥镜图像和诸如此类,或它们的组合。手术前或手术中图像数据可呈现为二维、三维或四维(包括例如基于时间或基于速度的信息)图像和/或来自从手术前或手术中图像数据集创建的模型的图像。显示系统110和主控制器106可以被定向,使得操作员o可以通过远程呈现的感知来控制医疗器械104和主控制器106。
40.可以通过操纵器组件102和/或主控制器106上的输入设备(例如,按钮、开关等)来改变显示系统110上的视觉指示器、标记和/或图像的显示。例如,致动按钮或开关可以使标记放置在显示系统110上显示的患者解剖结构的渲染模型中。标记可以对应于患者体内已经执行程序(例如,活检)的区域,或者否则指示医疗器械定位在患者解剖结构内的实际位置。这种虚拟导航标记可以用注册的手术前或同时图像或模型动态地引用。用于配准的系统和方法在pct公开号wo2016/191298(2016年12月1日公布,标题为“systems and methods of registration for image guided surgery”)和美国专利号8,900,131(2011年5月13日提交,标题为“medical system provide dynamic registration of a model of an anatomic structure for image-guided surgery”)中提供,以上专利全部内容通过引用并入本文。
41.控制系统112可以包括至少一个存储器和至少一个计算机处理器(未示出),用于实现医疗器械104、主控制器106、传感器系统108和显示系统110之间的控制。控制系统112还可以包括可以存储在非暂时性机器可读介质上的编程指令,以实现根据本文公开的本技
术的方面描述的一些或所有方法,包括用于向显示系统110提供信息的指令。控制系统112可以包括两个或更多个数据处理电路,其中一部分处理可选地在操纵器组件102上或附近执行,另一部分处理在主控制器106处执行等。控制系统112的处理器可以执行本文公开的过程的指令。可以采用多种集中式或分布式数据处理架构中的任何一种。类似地,编程指令可以被实现为多个单独的程序或子例程,或者它们可以被集成到本文描述的远程操作系统的多个其他方面。在一个实施例中,控制系统112支持无线通信协议,例如蓝牙、irda(红外数据通讯)、homerf(家庭射频技术)、ieee 802.11、dect(数位加强式无线通讯系统)、无线遥测和类似物。
42.控制系统112可以接收来自医疗器械104的力和/或扭矩反馈。作为响应,控制系统112可以向主控制器106发送信号。在一些实施例中,控制系统112可以发送指示操纵器组件102的一个或多个致动器移动医疗器械104的信号。医疗器械104可以通过患者p身体中的开口延伸到患者p身体内的内部手术部位。任何合适的常规和/或专用致动器可以与操纵器组件102一起使用。一个或多个致动器可以与操纵器组件102分离或与操纵器组件102集成。在一些实施例中,一个或多个致动器和操纵器组件102作为主支撑件114的一部分提供,主支撑件114可以定位成邻近患者p和手术台t。在一些实施例中,操纵器组件102、控制系统112、传感器系统108和显示系统110可以由主支撑件114支撑,或者这些部件中的一些或全部可以集成到主支撑件114中。可替代地,这些部件中的一个或多个可以安装到手术台t或集成到主控制器106中。
43.控制系统112还可以包括虚拟可视化系统,以在图像引导的外科手术程序期间控制医疗器械104时向操作员o提供导航辅助。使用虚拟可视化系统的虚拟导航可以基于对获取的解剖通道的术前或术中数据集的参考。在虚拟导航程序期间,传感器系统108可以用于计算医疗器械104相对于患者p的解剖结构的大致位置。该位置可用于产生宏观级跟踪图像(在患者p的解剖结构外部)和虚拟图像(在患者p的解剖结构内部)。控制系统112可以实施一个或多个em传感器、光纤传感器和/或其他传感器以配准和显示医疗器械以及术前记录的手术图像,诸如来自虚拟可视化系统的那些。例如,pct公开号wo2016/191298(2016年12月1日公布,标题为“systems and methods of registration for image guided surgery”)公开了一种这样的系统,其全部内容以引用方式并入本文。在美国专利号7,781,724(2006年9月26日提交,标题为“fiber optic position and shape sensing device and method relating thereto”)、美国专利号7,772,541(2008年3月12日提交,标题为“fiber optic position and/or shape sensing based on rayleigh scatter”)和美国专利号6,389,187(1998年6月17日提交,标题为“optical fiber bend sensor”)中描述了用于在三个维度上监测光纤的形状和相对方位的各种系统和方法,以上专利全部内容通过引用并入本文。
44.系统100还可以包括可选的操作和支持系统(未示出),例如照明系统、转向控制系统、冲洗系统和/或抽吸系统。在一些实施例中,系统100可以包括多于一个操纵器组件和/或多于一个主控制器。远程操作操纵器组件的确切数量可以针对要执行的外科手术程序和/或手术室内的空间限制等因素进行定制。多个主控制器可以并置或定位在单独的位置。多个主控制器允许多于一个操作员以各种组合控制一个或多个远程操作操纵器组件。
45.器械操纵器120可以被配置为支撑和定位医疗器械104的细长设备126。在pct公开
号wo2019/018736(提交于2018年7月20日,标题为“flexible elongate device systems and methods”)中描述了各种细长设备,该专利申请全部内容通过引用并入本文。
46.图2a和图2b是根据本技术的实施例配置的系统100的操纵器组件102的左侧视图。操纵器组件102通常包括器械操纵器120,其具有用于安装一个或多个器械的托架122。例如,托架122可以被配置为接收医疗器械104的器械接口124,使得医疗器械104在进行医疗操作之前选择性地耦合到器械操纵器120。图2a显示了医疗器械104,其具有从器械接口124突出的、从托架122上卸下的器械光纤连接器128;图2b显示了与托架122一起安装的医疗器械104。当医疗器械104与托架122一起安装时,细长设备126的至少一部分延伸超出托架122以与患者p(未示出)对接并且可以在使用系统100(图1a和1b)期间由器械操纵器120操纵。在这方面,器械操纵器120可以被配置为通过相对于患者以伸缩方式移动来相对于患者解剖结构插入和缩回细长设备126,并且可以影响细长设备126的自由度内的其他移动。与操纵器组件相关的各种操纵配置在pct申请号pct/us19/54718(2019年10月4日提交,标题为“systems and methods for positioning medical instruments”)中进行了描述,该申请全部内容通过引用并入本文。
47.图3是在安装器械接口124(例如,如图2a所示)之前器械操纵器120的托架122的一部分的透视图。如上所述,器械操纵器120的托架122可以被配置为接收器械接口124(图2a和图2b)并且可以包括响应于来自控制系统112(图1a)的命令驱动器械接口124上的对应输入的多个致动器或马达。如图所示,托架122还包括遮蔽的托架光纤连接器(“托架光纤连接器130”),其被配置为接收器械光纤连接器128。托架光纤连接器130可配置为与浮动光纤接口接合以实现光纤在多个自由度中的轻松连接,这将在下面参考图4a-图5进行更详细的解释。因此,一起参考图2a、图2b和图3,当器械光纤连接器128插入并连接到器械接口124的托架光纤连接器130时,操作员o可能不需要在插入期间完美地对准器械光纤连接器128的末端,从而为操作员o提供灵活性。浮动接口还可以防止连接器的错位,从而降低对(一个或多个)光纤的损坏的可能性,并允许(一个或多个)光纤的切割端进行正确和完整的连接。
48.图4a-图5示出了系统100的方面,系统100被配置为减少医疗器械104和器械操纵器120(此处未示出-参见图2b)之间的光纤连接处的摩擦。首先参考图4a,例如,出于说明的目的,托架光纤连接器130被示为从托架122的外壳或保护盖移除。所示实施例包括保持托架光纤连接器130并且一起提供减少摩擦的组件的浮动光纤接口组件(“浮动光纤接口160”)。浮动光纤接口160可为托架光纤连接器130提供各种自由度以相对于托架122移动并减少在安装医疗器械104期间光纤连接器128和托架光纤连接器130的壁之间的接触摩擦。如上所述,减少连接器之间的摩擦可以减少颗粒的产生并降低损坏光纤的切割端的风险。
49.托架光纤连接器130可以相对于托架122定位,使得仅托架光纤连接器130的连接器井136可见(参见图3)。在这点上,如图4a和图4c所示,托架122的外壳或保护盖可以与定位在托架光纤连接器130上靠近连接器井136的连接器唇缘134对接。连接器唇缘134可以设计尺寸和配置为填充在连接器井136周围形成的任何间隙,以防止碎屑和污染物进入托架122的内部区域。在这些实施例中,浮动光纤接口160的自由度可以影响连接器唇缘134的尺寸,使得当浮动光纤接口160到达托架光纤连接器130的行程极限时,连接器唇缘134防止碎屑和污染物进入。
50.浮动光纤接口160可以被配置为允许托架光纤连接器130在浮动平面(例如,x-y平
面,参见图4b)中相对于托架122平移。在图4a所示的取向中,浮动光纤接口160通常只允许托架光纤连接器130在浮动平面中横向显著移动,浮动平面的法线是器械光纤连接器128的插入方向(例如,z方向),从而在医疗器械104的安装期间为托架光纤连接器130提供足够的支撑。在一些实施例中,浮动光纤接口160的部件具有允许在除了横向平移之外的方向上相对少量的移动(即在z方向上的移动,以及围绕x、y和z轴的旋转及其组合)的公差。
51.浮动光纤接口160可以包括一对保持支架162,其定位在托架光纤连接器130侧面的相对配置中。保持支架162可以被配置为在器械光纤连接器128的插入的方向(例如,z方向)上支撑平移插座164,并允许在浮动平面(例如,x-y平面)中滑动平移。保持支架162可以包括槽182,槽182被配置为将平移插座164约束在垂直于浮动平面的方向上,并且允许被限制在浮动平面内的平移插座164的平移。为了实现这样的移动,平移插座164可以包括延伸到槽182中的凸片184,凸片184的尺寸被设计和配置为限制在垂直于浮动平面的方向上的移动,同时允许在浮动平面中平移。在图示的实施例中,每个保持支架162包括两个槽182,并且平移插座164对应地具有四个凸片184;然而,在其他实施例中,浮动光纤接口160包括适用于托架光纤连接器130的所需自由度的任何数量的保持支架162、槽182和凸片184。保持支架162还可以包括各种紧固件或其他安装特征件,例如螺钉168,以将浮动光纤接口160耦合到托架122。在这方面,保持支架162可以刚性连接到托架122,从而允许托架光纤连接器130通过平移插座164相对于保持支架162的移动而平移。
52.平移插座164还可包括稳定延伸部166,以抵抗托架光纤连接器130相对于浮动平面的显著旋转(例如,托架光纤连接器130的倾斜)。如图4c和图4d所示,例如,托架光纤连接器130可以具有与平移插座164对接的凸缘(ledge)138,以控制托架光纤连接器130插入浮动光纤接口160的深度。凸缘138的配置在医疗器械104的安装期间为托架光纤连接器130提供支撑,同时可以包括锁定特征件,例如固定螺钉180,以防止在移除医疗器械104期间托架光纤连接器130和浮动光纤接口160分离。在安装方位,如图4a所示,凸缘138与平移插座164的上表面对接以设置插入深度。
53.图4b是浮动光纤接口160的横截面图,通常从垂直于平移插座164的平移平面的视点示出(并且为了清楚起见隐藏了托架光纤连接器130)。平移插座164包括连接器开口190,托架光纤连接器130在组装到浮动光纤接口160期间插入连接器开口190中。保持支架162通常在垂直于浮动光纤接口160的平移平面的两个方向上捕获平移插座164;然而,在安装医疗器械104期间允许在平面内进行偏压移动以降低连接器的摩擦。为了提供偏压移动,保持支架162可以各自包括偏压元件(例如,由弹簧保持器172保持的螺旋弹簧170),其通过从保持支架162突出的臂174在平移插座164上施加相反的偏压力。臂174的远端包括被配置为在第一侧与弹簧170对接并且在第二侧与平移插座164的凸轮插座178对接的头部176。
54.在平移插座164沿正x方向平移期间,平移插座164朝向保持支架162之一的移动通过凸轮插座178传递到对应的头部176,从而使臂174中的一个偏转,并且将弹簧170压靠在弹簧保持器172上。弹簧170在平移方向上的压缩将平移插座164偏压回到弹簧力均衡的中立方位。在两个弹簧170具有相等弹簧力的实施例中,中立方位将在弹簧170之间居中。在正x方向上的上述移动也导致平移插座164移动远离保持支架162中的另一个,释放对应弹簧170上的压力,这可能导致弹簧170延伸和偏转臂174,使得头部176在平移期间保持与凸轮插座178接触。在这点上,臂174和头部176都随着平移插座164的移动而相互移动(例如,沿
相同方向),同时弹簧170中的一个被压缩并且弹簧170中的另一个被延伸。
55.在平移插座164沿正y方向平移期间,凸轮插座178的表面在y方向上的非线性轮廓导致每个头部176在彼此相反的方向上远离平移插座164移动,从而使臂174远离彼此偏转。因此臂174可以用作悬臂弹簧。臂174远离彼此的偏转可同时压缩两个弹簧170,从而将平移插座164偏压回到中立方位,通常在凸轮插座178的图示轮廓的谷中。在所示配置中,平移插座164在相反的负y方向上的平移对头部176、弹簧170和臂174具有类似的效果,从而再次将平移插座164偏压回到中立方位。在其他实施例中,凸轮插座178的表面的轮廓可以具有任何合适的轮廓(例如,线性的、弓形的等),其被配置为以期望的方式偏压平移插座164,并且在正y方向和负y方向可能不具有相等的偏压。
56.浮动光纤接口160还可以包括一个或多个特征件以限制平移插座164在任何自由度中的行进。如图所示,例如,浮动光纤接口160可以包括止动销186,该止动销186延伸通过一个或两个保持支架162。止动销186可以延伸通过平移插座164中的行程限制孔188,该行程限制孔的尺寸设计和配置为设置平移插座164平移的限制。如图所示,在平移插座164平移时,止动销186可以是静止的。在期望的平移极限处,行程限制孔188的边缘接触止动销186以停止平移插座164的平移。孔188显示为正方形以相应地限制每个x方向和y方向的行程,对x方向和y方向的平移组合有更长的限制;然而,任何行程限制形状都在本技术的范围内。
57.转向图4c-图4f,现在将更详细地解释托架光纤连接器130的摩擦减少的实施例。托架光纤连接器130的内表面和其中的光纤148的切割端可以通过一对相对的挡板132进一步免受碎屑和污染,该挡板132被配置为当器械光纤连接器128未插入时基本上密封托架光纤连接器130的内井。光纤148可以至少部分地由二氧化硅或其他类似材料构成。在一些实施例中,光纤148包括多个单独的光纤。挡板132可以朝向关闭位置偏压。通过手动操纵,例如在插入器械光纤连接器128时,或者通过例如具有致动器、马达、电磁力等的自动化系统,挡板132可枢转以朝向连接器井136的内壁旋转。在具有自动化挡板132的实施例中,一个或多个传感器可以被定位和配置为当器械光纤连接器128接近时,当医疗器械104被安装在托架122上时等,发送信号以缩回挡板132。
58.挡板132可以由聚合物、金属、复合材料、陶瓷和/或一些其他材料或材料组合构成。例如,挡板132可以至少部分地由镀有另一种金属(例如镍)的金属(例如铝)构成。器械光纤连接器128和挡板132之间的接触,以及随后在器械光纤连接器128和挡板132之间的摩擦/滑动可能产生器械光纤连接器128和/或挡板132的材料的松散颗粒。这些颗粒会沉积在光纤148的切割端上。当器械光纤连接器128完全连接到托架光纤连接器130时,光纤148的切割端上存在的颗粒会损坏光纤148。更具体地,颗粒可能被截留在托架光纤连接器130的光纤148和器械光纤连接器128的光纤之间。这些颗粒可能划伤、切碎和/或以其他方式损坏光纤148的暴露部分。光纤148的损坏会损坏和/或破坏从系统100的各个部件通过光纤148传递的信息的质量和可靠性。
59.用于避免上述颗粒损坏的常规补救措施或解决方案包括用布、棉签或其他清洁材料擦拭光纤148和/或托架光纤连接器130的套圈。其他解决方案包括,例如,在将器械光纤连接器128连接到托架光纤连接器130之前将清洁器械插入托架光纤连接器130。虽然这些解决方案可用于从光纤中去除预先存在的颗粒,但是解决方案没有处理或解决在器械光纤
连接器128和托架光纤连接器130之间的连接期间发生的颗粒的产生。
60.如图4d-图4f所示,根据本技术配置的托架光纤连接器130还可包括定位在托架光纤连接器130的连接器井136的至少一侧的减摩辊146。辊146可以定位成与器械光纤连接器128对接并将器械光纤连接器128朝向连接器井136的与辊146相对的一侧偏压。在这点上,辊可以由在一个末端处例如通过紧固件142钉到托架光纤连接器130的悬臂弹簧140偏压。具有辊146的悬臂弹簧140的末端可以包括支座特征144,以提供辊146和悬臂弹簧140之间的间隙,从而辊146可以在插入器械光纤连接器128期间自由旋转。如图4b所示,连接器开口190可包括释放切口192,以在插入器械光纤连接器128期间为悬臂弹簧140的偏转提供间隙。
61.当器械光纤连接器128插入托架光纤连接器130中时,器械光纤连接器128的一部分接触辊146,使悬臂弹簧140逐渐偏转远离连接器井136(参见图4f)。悬臂弹簧140的偏压力在插入期间将器械光纤连接器128推向与辊146相对的表面,从而减小器械光纤连接器128和托架光纤连接器130之间的表面接触面积,这可以减少颗粒生成的机会。在一些实施例中,可以使用多个辊来减少器械光纤连接器128和托架光纤连接器130之间的摩擦。另外的辊146可以定位在连接器井136的与辊146相同的一侧、相对侧和/或相邻侧。在这些实施例中,托架光纤连接器130可以包括在连接器井136的相对侧上的两个辊,在连接器井136的同一侧上的两个辊,在连接器井136的四个侧面中的每一侧上的一个或多个辊等,或其任意组合。浮动光纤接口160和辊146可以独立使用或相互结合使用,以减少医疗器械104安装期间的摩擦。在浮动光纤接口160与一个或多个辊146结合使用的实施例中,每个部件的各方面可以进一步减小器械光纤连接器128和托架光纤连接器130之间的整体摩擦。
62.图5示出了浮动光纤接口组件(“浮动光纤接口160
”’
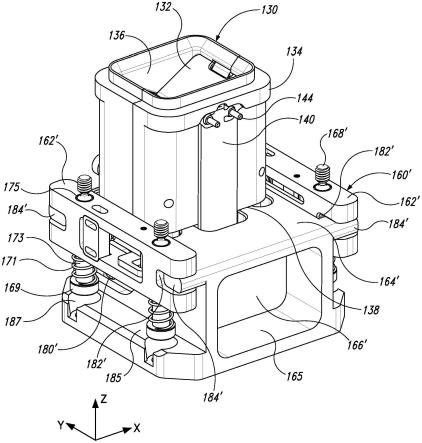
)的另一个实施例的透视图,该浮动光纤接口组件保持托架光纤连接器130,并且一起提供了摩擦减少的组件。浮动光纤接口160'与上述图4a的浮动光纤接口160具有相似之处。因此,除非另有说明,否则浮动光纤接口160'的一些特征用与图4a的浮动光纤接口160的类似特征相对应的相同数字的上标符号(')表示。浮动光纤接口160'可以为托架光纤连接器130提供各种自由度以相对于托架122(图1b)移动并在医疗器械104的安装期间减少光纤连接器128和托架光纤连接器130的壁之间的接触摩擦。
63.浮动光纤接口160'可以被配置为允许托架光纤连接器130在浮动平面(例如,x-y平面,参见图4b)中平移并在器械光纤连接器128的插入方向(例如,z方向)上相对于托架122平移。
64.浮动光纤接口160'包括一对保持支架162',保持支架162'定位在托架光纤连接器130侧面的相对配置中。保持支架162'可以被配置为在浮动平面(例如,x-y平面)中滑动平移期间支撑平移插座164'。保持支架162'可以包括槽182',槽182'被配置为将平移插座164'约束在垂直于浮动平面的方向上,并允许被限制在浮动平面内的平移插座164'的平移。为了实现这样的移动,平移插座164'可以包括延伸到槽182'中的凸片184',其被设计尺寸和被配置为限制平移插座164'相对于保持支架162'在垂直于浮动平面的方向上的移动,同时允许在浮动平面中平移(平移插座164'也可以在垂直于浮动平面的方向上相对于托架122平移,如下文将解释的)。
65.在图示的实施例中,每个保持支架162'包括两个槽182',并且平移插座164'对应
地具有四个凸片184';然而,在其他实施例中,浮动光纤接口160'包括适用于托架光纤连接器130的所需自由度的任何数量的保持支架162'、槽182'和凸片184'。保持支架162'可以进一步包括各种紧固件或其他安装特征件,例如螺钉168',以将浮动光纤接口160'可移动地耦合到托架122。保持支架162'可以通过将保持支架162'配置成具有孔175而可滑动地连接到托架122,孔175的尺寸和形状被设计为沿螺钉168'的轴部分173(例如,带肩螺钉168'的无螺纹肩部173或其他合适的紧固件)轴向平移,这允许滑架光纤连接器130相对于托架122在插入方向上平移。
66.从图5所示的浮动光纤接口160'的方位,通过浮动光纤接口160'在器械光纤连接器128的插入方向(例如,负z方向)上的移动允许托架光纤连接器130的偏压移动。在这样的移动期间,螺钉168'相对于托架122是静止的,并且浮动光纤接口160'的保持支架162'沿着螺钉168'的轴部分173行进直到螺钉168'的头部169邻接保持支架162'的下表面以停止平移。插入偏压元件(例如,由头部169保持的螺旋弹簧171)在将光纤连接器128插入托架光纤连接器130期间提供连接力(例如,在正z方向上的偏压力),从而在安装医疗器械104期间为托架光纤连接器130提供足够的支撑。在这方面,螺旋弹簧171被配置为将头部169偏压远离保持支架162'。在插入方向的行进结束时,头部169可以可选地邻接保持支架162',以进一步确保进行光纤连接。
67.平移插座164'可以包括下法兰部分165,该下法兰部分具有在螺钉168'方向上的延伸部185。延伸部185可以包括空腔187,空腔187被配置为在其中接收螺钉168'的头部169的至少一部分并且将螺钉168'与浮动光纤接口160'保持在一起,直到螺钉168'旋入托架122中。通过空腔187保持螺钉168'也可以抵抗螺旋弹簧170的力以将保持支架162'与平移插座164'保持在一起直到安装。空腔187可以具有允许工具(例如,六角扳手,未示出)接近头部169以安装和移除螺钉168'的下部开口(未示出)。平移插座164'还可以包括稳定延伸部166',以抵抗托架光纤连接器130相对于浮动平面的显著旋转(例如,托架光纤连接器130的倾斜)。
68.图6示出了在医疗器械204和被配置为与系统100一起使用的器械操纵器220之间的摩擦减小接口的另一个实施例。器械操纵器220可以包括耦合到托架222的上表面的平移对准板282。图6所示的医疗器械204和器械操纵器220的某些特征类似于上述图1a-图3的医疗器械104和器械操纵器120的特征。因此,除非另有说明,否则医疗器械204和器械操纵器220的特征在200系列中用与在100系列中表示的医疗器械104和器械操纵器120的相似特征对应的相同数字表示。
69.平移对准板282可以被配置为从托架222的上表面上方的第一方位线性平移,其中器械光纤连接器228没有插入托架光纤连接器230中,到邻近托架222的第二位置,其中器械光纤连接器228被插入托架光纤连接器230中。平移对准板282可以包括一个或多个伸缩支座232,其将平移对准板282限制为线性平移。支座232还可被配置为抑制平移对准板282的平移,以控制器械光纤连接器228和托架光纤连接器230之间的连接速率,因为高脉冲连接会损坏光纤的切割端。
70.如图6中所示,平移对准板282还包括光纤连接器通道284,以在医疗器械204最初在第一方位与平移对准板282配合时接收器械光纤连接器228。平移对准板282还可以包括一个或多个对准标记294,其被配置为相对于平移对准板282定位医疗器械204,使得当平移
对准板282从第一方位移动到第二方位时,器械光纤连接器228通常与托架光纤连接器230对准。为了在器械光纤连接器228和托架光纤连接器230之间形成连接,首先将医疗器械204对准并耦合到平移对准板282,然后同时将医疗器械204和平移对准板282从第一方位降低到第二方位,将器械光纤连接器228插入托架光纤连接器230。平移对准板282的降低可以是手动的或自动的,例如,使用一个或多个马达和传感器(未示出)。在其他实施例中,在通过传感器(未示出)或手动验证一个或多个系统部件的清洁之前,可能不允许降低平移对准板282。在一些实施例中,托架光纤连接器230的挡板可以被配置为在医疗器械204耦合到平移对准板282时打开(使用传感器/马达组合自动打开,或者通过机械连杆手动打开)。
71.平移对准板282可独立使用或与图4a-图4f的浮动光纤接口160和/或辊146结合使用,以减少医疗器械104安装期间的摩擦。在平移对准板282与浮动光纤接口160和/或一个或多个辊146结合使用的实施例中,每个部件的各方面可进一步减少器械光纤连接器128和托架光纤连接器130之间的整体摩擦。
72.随着平移对准板282从第一方位降低到第二方位,在托架222和医疗器械204之间形成各种其他机械和/或电连接。为了便于机械连接,平移对准板282可以包括用于通过器械操纵器220的控制件的移动的各种开口,使得该移动被传递到医疗器械204的各种接收部件。类似地,平移对准板282可以包括电连接器以形成器械操纵器220和医疗器械204之间的连接。在一些实施例中,平移对准板282具有一个或多个中间部件以将器械操纵器220的移动和/或信号传递到医疗器械204。在具有中间部件的实施例中,平移对准板282可用作无菌环境的清洁连接,例如耦合到平移对准板282周边的帘布。
73.图7a和图7b示出了医疗器械304和被配置为与系统100一起使用的器械操纵器320之间的摩擦减小接口的另一个实施例。器械操纵器320可以包括定位在器械操纵器320上的与托架322相邻的对准翼梁394。图7a和图7b中所示的医疗器械304和器械操纵器320的某些特征类似于上述图1a-图3的医疗器械104和器械操纵器120的特征,因此,除非另有说明,否则医疗器械304和器械操纵器320的特征在300系列中用与在100系列中表示的医疗器械104和器械操纵器120的相似特征对应的相同数字表示。
74.对准翼梁394可以从器械操纵器320的外壳或保护盖突出。如图7b所示,对准翼梁394可以具有接合表面396,该接合表面大体上对应于医疗器械304的器械接口324的外表面的尺寸、形状和轮廓。再次一起参见图7a和图7b,例如,接合表面396可以是弓形的并且被配置为与器械接口324紧密对接以在将器械光纤连接器328插入托架光纤连接器330期间引导医疗器械304与托架322对准。在这点上,当操作员o(未示出)将医疗器械304与托架322一起安装时,操作员o首先将接合表面396与器械接口324接合,同时器械光纤连接器328仍然与托架光纤连接器330脱离。随着操作员o降低医疗器械304(将医疗器械304朝向托架322移动),器械接口324保持与接合表面396接触以提供器械光纤连接器328与托架光纤连接器330的路线对准。随着医疗器械304进一步朝向托架322移动(并且器械接口324维持与接合表面396的接触),在插入期间器械光纤连接器328和托架光纤连接器330彼此接触时,可以减小它们之间的摩擦,因为它们可以在接触前粗略对准。
75.图7c示出了医疗器械304和被配置为与系统100一起使用的器械操纵器320之间的摩擦减少接口的另一个实施例。在一些实施例中,接合表面396可以包括同步特征(clocking feature),例如,键槽325,它在器械接口324中延伸并被配置为与从器械操纵器
320的接合表面396延伸的键突起397对接。键槽325和键突起397的对接被配置为使医疗器械304相对于托架322取向。虽然在图7c中显示键突起397从接合表面396延伸,但在其他实施例中,键突起397可用于在没有对准翼梁394的情况下对医疗器械304进行取向,其中键突起397可以从器械操纵器320延伸。
76.图7d示出了医疗器械304和被配置为与系统100一起使用的器械操纵器320之间的摩擦减少接口的另一个实施例。在一些实施例中,托架322可以包括同步特征,例如销398,它从托架322延伸并被配置为与器械接口324中的凹口327对接。凹口327和销398的对接被配置为使医疗器械304相对于托架322定向。如图所示,多个销398和对应的凹口327可用于使医疗器械304相对于托架322定向。在其他实施例中,销398是锥形的以在医疗器械304朝向托架322降低时对医疗器械304逐渐定向。虽然销398显示为从具有对准翼梁394的器械操纵器320延伸,但在其他实施例中,销398可用于在没有对准翼梁394的情况下对医疗器械304进行定向。
77.对准翼梁394可以单独使用或与图4a-图5的浮动光纤接口160、辊146和/或平移对准板282和/或与图7c和图7d的同步特征结合使用以减少医疗器械104安装期间的摩擦。在对准翼梁394与浮动光纤接口160、一个或多个辊146和/或平移对准板282结合使用的实施例中,每个部件的各方面可以进一步减小器械光纤连接器128和托架光纤连接器130之间的整体摩擦。
78.图8示出了配置为与系统100一起使用的医疗器械404之间的摩擦减少接口的另一个实施例。器械光纤连接器428可以包括定位在器械光纤连接器428的远端部分上的锥形运动学表面440。图8中所示的医疗器械404的某些特征类似于上述图1a-图3的医疗器械104的特征。因此,除非另有说明,否则医疗器械404的特征在400系列中用与在100系列中表示的医疗器械104的相似特征对应的相同数字表示。
79.如图所示,锥形运动学表面440可以是截头圆锥形的,从器械光纤连接器428的外表面到靠近光纤448的器械光纤连接器428的远端处的尖端442渐缩。在将医疗器械404安装到器械操纵器(未示出)的托架期间,与器械光纤连接器428的主体相比,尖端442的较小尺寸允许与托架光纤连接器的更大的初始对准范围。随着器械光纤连接器428进一步插入托架光纤连接器,锥形运动学表面440使器械光纤连接器428对准,从而允许插入托架光纤连接器。锥形运动学表面440可以提供医疗器械404到托架422的对准约束。因此,可以排除器械接口424的对准约束特征,使得医疗器械404到托架422的连接不过度约束。在其他实施例中,运动学表面440可以是任何合适的形状以将器械光纤连接器428引导到托架光纤连接器中,包括锥形的正方形、椭圆形、三角形等。
80.锥形运动学表面440可以独立使用或与图4a-图7b的浮动光纤接口160、辊146、平移对准板282和/或对准翼梁394结合使用,以减少安装医疗器械104过程中的摩擦。在锥形运动学表面440与浮动光纤接口160、一个或多个辊146、平移对准板282和/或对准翼梁394结合使用的实施例中,每个部件的各方面可以进一步减小器械光纤连接器128和托架光纤连接器130之间的整体摩擦。
81.示例
82.本技术的几个方面在以下示例中阐述:
83.1.一种浮动连接器接口,包括:
84.具有槽的保持支架;
85.与保持支架滑动关联的平移插座,平移插座包括:
86.凸片部分,其延伸到槽中以允许平移插座相对于保持支架平移,其中平移被限制在浮动平面内;以及
87.被配置为接收托架连接器的孔;以及
88.偏压元件,其定位在保持支架和平移插座之间,其中偏压元件被配置为抵抗平移插座的平移。
89.2.根据示例1所述的浮动连接器接口,其中保持支架包括第一保持支架,槽包括第一槽,平移插座的凸片部分包括第一凸片部分,其中浮动连接器接口还包括:
90.第二保持支架,其定位在平移插座的与第一保持支架相对的边缘上,第二保持支架具有第二槽,该第二槽被配置为接收平移插座的第二凸片部分并允许平移插座相对于第一保持支架和第二保持支架平移。
91.3.根据示例2所述的浮动连接器接口,其中偏压元件包括第一偏压元件,并且其中浮动连接器接口还包括位于第二保持支架和平移插座之间的第二偏压元件,其中第二偏压元件被定位成与第一偏压元件相对。
92.4.根据示例3所述的浮动连接器接口,其中第一偏压元件和第二偏压元件具有相反的偏压力,以在与偏压力对准的方向上将平移插座推动到中立方位。
93.5.根据示例3或示例4所述的浮动连接器接口,其中第一和第二偏压元件包括螺旋弹簧。
94.6.根据示例2-5中任一项所述的浮动连接器接口,其中第一保持支架还包括第一臂,并且第二保持支架还包括第二臂,并且其中第一臂和第二臂被配置为随着平移插座在与偏压力对准的方向上的移动而相互偏转。
95.7.根据示例6所述的浮动连接器接口,其中:
96.第一臂还包括在第一臂的远端上的第一头部,
97.第二臂还包括在第二臂的远端上的第二头部,
98.平移插座还包括被配置为与第一头部对接的第一凸轮插座和被配置为与第二头部对接的第二凸轮插座,并且
99.第一和第二凸轮插座具有凸轮轮廓,该凸轮轮廓被配置为在平移插座沿垂直于偏压力的方向移动期间使第一臂和第二臂远离彼此偏转。
100.8.根据示例7所述的浮动连接器接口,其中凸轮轮廓被成形为使得偏压力将平移插座在垂直于偏压力的方向上推动到中立方位。
101.9.根据示例1-8中任一项所述的浮动连接器接口,其中:
102.保持支架具有孔,孔被配置为在其中滑动地接收紧固件,使得保持支架能够沿紧固件轴向平移;
103.浮动连接器接口还包括位于保持支架和紧固件的头部之间的插入偏压元件;并且
104.插入偏压元件被配置为将紧固件的头部偏压远离保持支架。
105.10.根据示例1-9中任一项所述的浮动连接器接口,其中浮动连接器接口包括浮动光纤连接器接口,并且其中托架连接器包括托架光纤连接器。
106.11.一种托架,包括:
107.具有槽的保持支架;
108.与保持支架滑动关联的平移插座,平移插座包括延伸到槽中以允许平移插座相对于托架平移的凸片部分,其中平移被限制在浮动平面内;
109.托架连接器,其具有可移除地耦合到平移插座中的孔的外壳;以及
110.偏压元件,其定位在保持支架和平移插座之间,其中偏压元件被配置为抵抗平移插座的平移,并且其中器械连接器插入托架连接器的方向垂直于浮动平面。
111.12.根据示例11所述的托架,其中保持支架包括第一保持支架,槽包括第一槽,并且平移插座的凸片部分包括第一凸片部分,并且其中托架还包括:
112.第二保持支架,其定位在平移插座的与第一保持支架相对的边缘上,第二保持支架具有第二槽,该第二槽被配置为接收平移插座的第二凸片部分并允许平移插座相对于第一保持支架和第二保持支架平移。
113.13.根据示例12所述的托架,其中偏压元件包括第一偏压元件,并且其中托架还包括位于第二保持支架和平移插座之间的第二偏压元件,第二偏压元件被定位成与第一偏压元件相对。
114.14.根据示例13所述的托架,其中第一和第二偏压元件具有相反的偏压力,以在与偏压力对准的方向上将平移插座推动到中立方位。
115.15.根据示例13或示例14所述的托架,其中第一和第二偏压元件包括螺旋弹簧。
116.16.根据示例12-15中任一项所述的托架,其中第一保持支架还包括第一臂并且第二保持支架还包括第二臂,并且其中第一臂和第二臂被配置为随着平移插座在与偏压力对准的方向上的移动而相互偏转。
117.17.根据示例16所述的托架,其中:
118.第一臂在第一臂的远端上具有第一头部,并且第二臂在第二臂的远端上具有第二头部,
119.平移插座还包括被配置为与第一头部对接的第一凸轮插座和被配置为与第二头部对接的第二凸轮插座,并且
120.第一和第二凸轮插座具有凸轮轮廓,该凸轮轮廓被配置为在平移插座沿垂直于偏压力的方向移动期间使第一臂和第二臂远离彼此偏转。
121.18.根据示例17所述的托架,其中凸轮轮廓被成形为使得偏压力将平移插座在垂直于偏压力的方向上推动到中立方位。
122.19.根据示例11-18中任一项所述的托架,其中:
123.保持支架还包括孔,孔被配置为在其中滑动地接收紧固件,使得保持支架能够沿紧固件轴向平移;
124.托架还包括插入偏压元件,插入偏压元件位于保持支架和紧固件的头部之间;并且
125.插入偏压元件被配置为将紧固件的头部远离保持支架偏压。
126.20.根据示例11-19中任一项所述的托架,还包括定位在外壳的井的第一侧上的辊,其中辊通过悬臂弹簧朝向井偏压。
127.21.根据示例20所述的托架,其中孔包括用于悬臂弹簧的间隙的切口。
128.22.根据示例20或示例21所述的托架,还包括第二辊,第二辊定位在与井的第一侧
相对的井的第二侧上,其中第二辊通过第二悬臂弹簧朝向第一辊偏压。
129.23.根据示例22所述的托架,还包括第三辊,第三辊定位在与井的第一侧或第二侧中的任一个相邻的井的第三侧上,其中第三辊通过第三悬臂弹簧朝向井偏压。
130.24.根据示例23所述的托架,还包括第四辊,第四辊定位在与井的第三侧相对的井的第四侧上,其中第四辊通过第四悬臂弹簧朝向第三辊偏压。
131.25.根据示例22-24中任一项所述的托架,其中托架连接器还包括定位在井中的挡板。
132.26.根据示例11-25中任一项所述的托架,其中外壳具有被配置为与平移插座对接以控制托架连接器在孔内的插入深度的凸缘。
133.27.根据示例11-26中任一项所述的托架,其中平移插座具有锁定特征以将外壳保持在孔内。
134.28.根据权利要求11-27中任一项所述的托架,其中浮动连接器接口包括浮动光纤连接器接口,并且其中托架连接器包括托架光纤连接器。
135.29.一种连接器对准装置,包括:
136.具有托架光纤连接器的托架;
137.板,其被配置为可移除地保持器械接口对准以便连接到托架,板具有被配置为接收器械光纤连接器的孔;以及
138.耦合在板和托架之间的伸缩支座,
139.其中伸缩支座可操作以将板定位在板与托架间隔开的第一方位,并且将板定位在板与托架相邻的第二方位。
140.30.根据示例29所述的连接器对准装置,其中孔被配置成当板处于第一方位时将器械光纤连接器定位成与托架光纤连接器对准。
141.31.根据示例29或示例30所述的连接器对准装置,其中伸缩支座可操作以在第一方位和第二方位之间线性平移板。
142.32.根据示例29-31中任一项所述的连接器对准装置,其中当板处于第二方位时,器械光纤连接器被连接到托架光纤连接器。
143.33.根据示例29-32中任一项所述的连接器对准装置,其中伸缩支座的移动被阻尼。
144.34.根据示例29-32中任一项所述的连接器对准装置,其中伸缩支座还包括一个或多个弹簧以朝向第一方位将偏压力施加到板。
145.35.根据示例29所述的连接器对准装置,其中板的移动是自动的。
146.36.根据示例29-35中任一项所述的连接器对准装置,其中板还包括连接器,连接器被配置为在器械接口和托架之间传递机械移动或电信号中的一个或多个。
147.37.根据示例29-36中任一项所述的连接器对准装置,其中板是可调节的以将器械接口对准托架。
148.38.根据示例29-37中任一项所述的连接器对准装置,其中板还包括一个或多个中间部件,该中间部件被配置为将机械移动从托架传递到器械接口。
149.39.根据示例29-38中任一项所述的连接器对准装置,其中板具有清洁的连接特征件。
150.40.根据示例29-39中任一项所述的连接器对准装置,还包括连接到板的周边的帘布。
151.41.一种对准系统,包括:
152.具有外壳和托架光纤连接器的托架;
153.具有外表面和器械光纤连接器的器械接口,该器械光纤连接器被配置为在器械接口与托架配合时连接到托架光纤连接器;以及
154.从托架的外壳突出的对准翼梁,对准翼梁具有与器械接口的外表面相对应的形状并且被配置为对准器械接口和托架,使得器械光纤连接器与托架光纤连接器对准。
155.42.根据示例41所述的对准系统,其中对准翼梁被集成到外壳中。
156.43.根据示例41或示例42所述的对准系统,其中对准翼梁是弓形的。
157.44.根据示例41所述的对准系统,其中外壳还包括从外壳延伸的键突起,并且器械接口还包括被配置成与键突起对接的键槽,其中键槽和键突起的对接被配置成在器械光纤连接器和托架光纤连接器的连接期间将器械接口定向到托架。
158.45.根据示例43所述的对准系统,其中键突起从对准翼梁延伸。
159.46.根据示例41所述的对准系统,其中托架还包括销并且器械接口还包括被配置为与销对接的凹口,其中凹口和销的对接被配置为在器械光纤连接器和托架光纤连接器的连接期间将器械接口定向到托架。
160.47.根据示例45所述的对准系统,其中托架包括多个销并且外壳包括对应于多个销的多个凹口。
161.48.根据示例46或示例47所述的对准系统,其中销是锥形的。
162.49.根据示例41所述的对准系统,其中托架光纤连接器被耦合到示例1的浮动光纤连接器接口。
163.50.一种器械,包括:
164.器械接口;以及
165.从器械接口突出的器械光纤连接器,该器械光纤连接器包括:
166.连接器主体,其具有配置成与托架光纤连接器对接的外表面;以及锥形运动学表面,其定位在连接器主体的远端部分上,锥形运动学表面从连接器主体的外表面到连接器主体的尖端向下渐缩,其中锥形运动学表面被配置为在器械接口的安装期间对准器械光纤连接器和托架光纤连接器。
167.51.根据示例50所述的器械,其中锥形运动学表面包括截头圆锥运动学表面。
168.52.根据示例50或示例51所述的器械,其中锥形运动学表面的形状包括渐缩的正方形、渐缩的椭圆形或渐缩的三角形中的一种或多种。
169.53.根据示例50-52中任一项所述的器械,其中托架光纤连接器耦合到示例1的浮动光纤连接器接口。
170.结论
171.本技术的实施例的以上详细描述并非旨在穷举或将本技术限制为以上公开的精确形式。尽管上面出于说明性目的描述了该技术的具体实施例和示例,但是如相关领域的技术人员将认识到的,在该技术的范围内可以进行各种等效修改。例如,虽然步骤以给定顺序呈现,但替代实施例可以以不同顺序执行步骤。此外,本文描述的各种实施例也可以组合
以提供进一步的实施例。本文提及“一个实施例”、“一实施例”或类似的表述意味着结合实施例描述的特定特征、结构、操作或特性可以包括在本技术的至少一个实施例中。因此,本文中出现的此类短语或表述不一定都指同一实施例。
172.为了便于参考,在整个本公开中使用相同的附图标记来标识相似或类似的部件或特征,但是使用相同的附图标记并不意味着这些特征应该被解释为相同的。实际上,在本文描述的许多示例中,相同编号的特征具有在结构和/或功能上彼此不同的多个实施例。此外,相同的阴影可用于指示横截面中组成相似的材料,但使用相同的阴影并不意味着材料应被解释为相同,除非本文特别指出。
173.此外,除非“或”一词被明确限制为仅表示在参考两个或多个项目的列表时其他项目之外的单个项目,否则在这样的列表中使用“或”将解释为包括(a)列表中的任何单个项目,(b)列表中的所有项目,或(c)列表中项目的任何组合。在上下文允许的情况下,单数或复数术语也可以分别包括复数或单数术语。此外,术语“包括”自始至终用于表示至少包括所列举的特征,从而不排除任何更多数量的相同特征和/或其他类型的其他特征。诸如“上”、“下”、“前”、“后”、“竖直”和“水平”的方向性术语可以在本文中用于表达和阐明各种元素之间的关系。应当理解,这些术语并不表示绝对取向。此外,虽然已经在那些实施例的上下文中描述了与本技术的某些实施例相关联的优点,但其他实施例也可以表现出这样的优点,并且并非所有实施例都必须表现出这样的优点以落入本技术的范围内。因此,本公开和相关技术可以涵盖本文未明确示出或描述的其他实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。