技术特征:
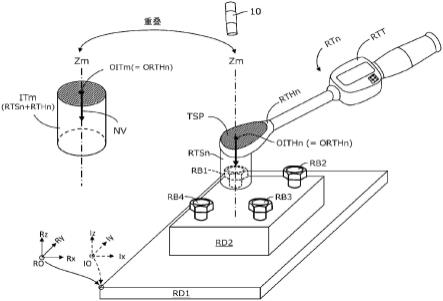
1.一种基于增强现实的机械紧固作业方法,其是由第一作业者使用将虚拟空间重叠于现实空间而生成的增强现实空间而进行的机械紧固作业方法,其特征在于,所述现实空间包括机械紧固部、以及套在所述机械紧固部上的工具,所述虚拟空间包括模拟所述机械紧固部的机械紧固部虚拟体、以及模拟所述工具的工具虚拟体,在所述增强现实空间中,所述机械紧固部与所述机械紧固部虚拟体一一对应,并且所述工具与所述工具虚拟体一一对应,生成所述增强现实空间的增强现实系统具有:相机,其拍摄所述现实空间;服务器,其构成为与所述相机连接,对由所述相机拍摄到的图像进行解析,生成增强现实空间;以及所述工具,其取得在所述机械紧固部的松紧时观察到的松紧信息,并与所述服务器进行所述松紧信息的接收发送,所述机械紧固作业方法包括如下步骤:在所述工具检知到松紧所述机械紧固部的所述松紧信息时,确定与所述机械紧固部一一对应的所述机械紧固部虚拟体,并在所述虚拟空间中显现所确定的所述机械紧固部虚拟体。2.根据权利要求1所述的基于增强现实的机械紧固作业方法,其特征在于,所述基于增强现实的机械紧固作业方法包括如下步骤:制作第一作业表,该第一作业表基于所述第一作业者的紧固作业而生成,并且具有所述机械紧固部的位置信息、所述松紧,将所述第一作业表所具有的所述位置信息投影至所述增强现实空间,以向第二作业者示教所述第一作业者的作业内容。3.根据权利要求2所述的基于增强现实的机械紧固作业方法,其特征在于,所述工具包括作业者把持的柄部、与所述柄部连接的工具头部、以及装配于所述工具头部的套筒部,所述服务器对所述相机取得的所述工具头部进行图像解析,生成包含代表所述工具头部的位置的工具代表点的工具基准面,并且在所述相机从所述工具基准面视觉观察所述工具的方向上规定以所述工具代表点为起点的方向矢量,所述服务器规定代表所述工具头部以及所述套筒部的工具尺寸,所述服务器在所述虚拟空间中从所述工具代表点起沿着所述方向矢量生成并显现具有所述工具尺寸的所述工具虚拟体。4.根据权利要求3所述的基于增强现实的机械紧固作业方法,其特征在于,所述机械紧固部虚拟体模拟具有顶部、与所述顶部连接的轴部、以及与所述轴部连接的螺纹部的螺栓,并且在所述顶部与所述轴部连接的连接面和所述轴部的轴相交的交点具有机械紧固部虚拟体代表点,所述服务器以在沿着所述方向矢量并且从所述工具代表点起分开与所述工具尺寸相应的距离的位置配置所述机械紧固部虚拟体代表点的方式,在所述虚拟空间中生成并显现
所述机械紧固部虚拟体。5.根据权利要求4所述的基于增强现实的机械紧固作业方法,其特征在于,所述松紧信息是紧固下限转矩值与紧固上限转矩值之间的紧固完成转矩值。6.根据权利要求3所述的基于增强现实的机械紧固作业方法,其特征在于,所述服务器在检知到所观察的所述机械紧固部的紧固转矩的上升率超过了预先规定的紧固转矩的上升率的情况时,发出警告。7.根据权利要求5所述的基于增强现实的机械紧固作业方法,其特征在于,所述第一作业表具有:所述紧固下限转矩值;以及所述紧固上限转矩值,所述基于增强现实的机械紧固作业方法包括如下步骤:所述服务器在检知到所述松紧信息时,在所述第一作业表中追记所述机械紧固部虚拟体代表点的坐标、所述方向矢量的坐标、所述紧固完成转矩值、以及与所述机械紧固部的松紧时相关的时间信息,并验证机械紧固部的数量。8.根据权利要求7所述的基于增强现实的机械紧固作业方法,其特征在于,所述基于增强现实的机械紧固作业方法包括如下步骤:所述服务器取得并保存在所述增强现实空间中在所述机械紧固部的附近显示所述紧固完成转矩值、以及所述时间信息的图像。9.根据权利要求7所述的基于增强现实的机械紧固作业方法,其特征在于,所述服务器通过制作从所述第一作业表去除了所述紧固转矩信息以及所述时间信息的第二作业表,并基于所述第一作业表所记的所述机械紧固部虚拟体的所述位置信息在所述增强现实空间中显示所述机械紧固部虚拟体,从而向第二作业者示教所述机械紧固部的位置、以及松紧的顺序。10.根据权利要求9所述的基于增强现实的机械紧固作业方法,其特征在于,所述服务器在所述增强现实空间中,在所述第二作业者利用所述工具松紧所述机械紧固部时,通过同时采用对所述工具虚拟体与所述机械紧固部虚拟体干涉的情况进行判断的干涉判断、以及所述松紧信息,来确定所松紧的所述机械紧固部与所述机械紧固部虚拟体一一对应。11.根据权利要求10所述的基于增强现实的机械紧固作业方法,其特征在于,所述干涉判断是所述虚拟空间中的所述工具虚拟体与所述机械紧固部虚拟体的重叠判断。12.根据权利要求10所述的基于增强现实的机械紧固作业方法,其特征在于,所述干涉判断基于所述虚拟空间中的工具虚拟体代表点与所述机械紧固部虚拟体代表点的距离来进行判断。13.根据权利要求9所述的基于增强现实的机械紧固作业方法,其特征在于,所述服务器在所述第二作业表中追记所述紧固完成转矩值、以及与所述机械紧固部的松紧时相关的所述时间信息,并验证所述数量。14.根据权利要求13所述的基于增强现实的机械紧固作业方法,其特征在于,所述服务器取得并保存在所述增强现实空间中在所述机械紧固部的附近显示所述紧
固完成转矩值、以及所述时间信息的图像。
技术总结
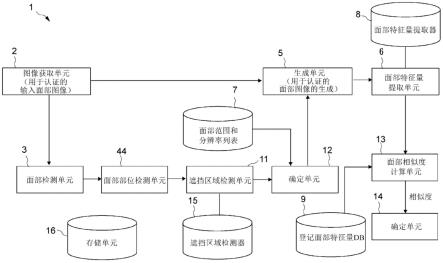
在本发明的机械紧固作业方法中,在增强现实空间中,机械紧固部与机械紧固部虚拟体一一对应,工具与工具虚拟体一一对应,生成增强现实空间的增强现实构成系统具有拍摄现实空间的相机、对由相机拍摄到的图像进行解析并生成增强现实空间的服务器、以及取得在机械紧固部的松紧时观察到的转矩信息并与服务器接收发送该转矩信息的工具,机械紧固作业方法包括如下步骤:在工具检知到松紧机械紧固部的转矩信息时,确定与机械紧固部一一对应的机械紧固部虚拟体,并在虚拟空间中显现所确定的机械紧固部虚拟体。部虚拟体。部虚拟体。
技术研发人员:山口刚二郎 中田祥吾 平井祐辅 杨娜 谷田雄太 冈田智仙
受保护的技术使用者:株式会社日立制作所
技术研发日:2020.03.05
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。