技术特征:
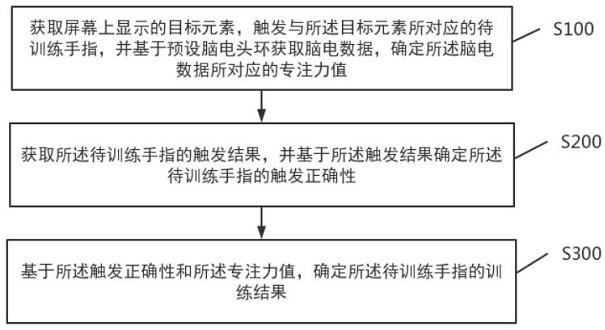
1.一种智能假肢的训练方法,其特征在于,所述方法包括:获取屏幕上显示的目标元素,触发与所述目标元素所对应的待训练手指,并基于预设脑电头环获取脑电数据,确定所述脑电数据所对应的专注力值;获取所述待训练手指的触发结果,并基于所述触发结果确定所述待训练手指的触发正确性;基于所述触发正确性和所述专注力值,确定所述待训练手指的训练结果。2.根据权利要求1所述的智能假肢的训练方法,其特征在于,所述获取屏幕上显示的目标元素,触发与所述目标元素所对应的待训练手指,包括:获取所述屏幕上设置的若干元素,从所述若干元素中确定高亮显示的所述目标元素,并获取所述目标元素所对应的方位信息,其中,所述方位信息反映的是所述目标元素在所述若干元素中的相对位置;根据所述方位信息,触发在智能假肢中对应的手指,并将所述手指作为所述待训练手指。3.根据权利要求2所述的智能假肢的训练方法,其特征在于,所述获取所述待训练手指的触发结果,并基于所述触发结果确定所述待训练手指的触发正确性,包括:获取所述待训练手指的动作信号,并在接收到所述动作信号时,确定所述待训练手指的触发结果为触发成功;当所述待训练手指触发成功时,获取所述待训练手指在所述智能假肢中的位置信息;若所述位置信息与所述方位信息匹配,则确定所述待训练手指的触发正确性为正确手指;若所述位置信息与所述方位信息不匹配,则确定所述待训练手指的触发正确性为错误手指。4.根据权利要求3所述的智能假肢的训练方法,其特征在于,所述基于所述触发正确性和所述专注力值,确定所述待训练手指的训练结果,包括:若所述触发正确性为错误手指,且所述专注力值小于专注力阈值,则确定所述待训练手指的训练结果为处于一级训练阶段;若所述触发正确性为错误手指,且所述专注力值大于专注力阈值,则确定所述待训练手指的训练结果为处于二级训练阶段;若所述触发正确性为正确手指,且所述专注力值小于专注力阈值,则确定所述待训练手指的训练结果为处于三级训练阶段;若所述触发正确性为正确手指,且所述专注力值大于专注力阈值,则确定所述待训练手指的训练结果为处于四级训练阶段;其中,所述一级训练阶段的训练难度<所述二级训练阶段的训练难度<所述三级训练阶段的训练难度<所述四级训练阶段的训练难度。5.根据权利要求4所述的智能假肢的训练方法,其特征在于,所述基于所述触发正确性和所述专注力值,确定所述待训练手指的训练结果,还包括:若所述训练结果为处于一级训练阶段,则获取所述待训练手指的触发时刻以及所述专注力值小于所述专注力阈值的发生时刻;若所述发生时刻早于所述触发时刻,则判定所述专注力值的影响所述待训练手指的触
发正确性;若所述发生时刻晚于所述触发时刻,则判定所述待训练手指的触发正确性影响所述专注力值。6.根据权利要求1-5任一项所述的智能假肢的训练方法,其特征在于,所述方法还包括:基于所述目标元素的运动轨迹,触发与所述运动轨迹所对应的待训练手指组合,并获取所述待训练手指组合的触发正确性;根据所述基于所述待训练手指组合的触发正确性和所述专注力值,确定所述待训练手指组合的训练结果。7.根据权利要求6所述的智能假肢的训练方法,其特征在于,所述基于所述目标元素的运动轨迹,触发与所述运动轨迹所对应的待训练手指组合,并获取所述待训练手指组合的触发正确性,包括:基于所述屏幕上显示的轨道形状,确定所述目标元素的运动轨迹;按照所述运动轨迹的方向依次触发多个待训练手指,并分别获取每个待训练手指的得分信息,所述得分信息用于反映所述待训练手指的方位信息与所述运动轨迹的方向之间的匹配度;若每个待训练手指的得分信息均大于或者等于预设的阈值分数时,则确定所述待训练手指组合的触发正确性为正确手指。8.一种智能假肢的训练装置,其特征在于,所述装置包括:手指触发模块,用于获取屏幕上显示的目标元素,触发与所述目标元素所对应的待训练手指,并基于预设脑电头环获取脑电数据,确定所述脑电数据所对应的专注力值;触发判定模块,用于获取所述待训练手指的触发结果,并基于所述触发结果确定所述待训练手指的触发正确性;训练分析模块,用于基于所述触发正确性和所述专注力值,确定所述待训练手指的训练结果。9.一种智能假肢,其特征在于,所述智能假肢包括存储器、处理器及存储在存储器中并可在所述处理器上运行的智能假肢的训练程序,所述处理器执行所述智能假肢的训练程序时,实现如权利要求1-7任一项所述的智能假肢的训练方法的步骤。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有智能假肢的训练程序,所述智能假肢的训练程序被处理器执行时,实现如权利要求1-7任一项所述的智能假肢的训练方法的步骤。
技术总结
本发明公开了一种智能假肢的训练方法、智能假肢及存储介质,方法包括:获取屏幕上显示的目标元素,触发与目标元素所对应的待训练手指,并基于预设脑电头环获取脑电数据,确定所述脑电数据所对应的专注力值;获取所述待训练手指的触发结果,并基于所述触发结果确定所述待训练手指的触发正确性;基于所述触发正确性和所述专注力值,确定所述待训练手指的训练结果。本发明可基于显示的目标元素来控制对应的手指触发,并基于该手指的触发正确性以及用户的专注力值来对该手指的训练结果进行评估,不但可以实现对用户手指的针对性训练,还可以通过引入专注力值,在保证对假肢的训练的同时,还对专注力进行了训练,实现假肢与用户专注力的联合训练。的联合训练。的联合训练。
技术研发人员:韩璧丞
受保护的技术使用者:深圳市心流科技有限公司
技术研发日:2022.09.21
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。