技术特征:
1.一种三重四极质谱仪参数优化方法,其特征在于,包括:获取待优化参数和所述质谱仪的检测状态;设置目标函数;采用人工鱼群算法,根据所述目标函数和所述检测状态计算所述待优化参数的适应度;根据所述适应度调整所述待优化参数,获取目标参数。2.根据权利要求1所述的三重四极质谱仪参数优化方法,其特征在于,所述检测状态包括质谱图中谱峰的峰高和半峰宽。3.根据权利要求2所述的三重四极质谱仪参数优化方法,其特征在于,所述目标函数为:f=10-5
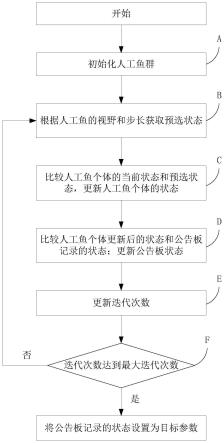
h k/w;其中,f代表所述目标函数,h为谱峰的峰高,w为谱峰的半峰宽,k为常数。4.根据权利要求1所述的三重四极质谱仪参数优化方法,其特征在于,采用人工鱼群算法调整所述待优化参数,获取目标参数,包括:步骤a:将所述待优化参数设置为人工鱼个体的状态,初始化公告板、各人工鱼个体的视野和步长,设置最大迭代次数;步骤b:各人工鱼个体根据所述视野和步长获取预选状态;步骤c:比较各人工鱼个体当前状态和所述预选状态,更新人工鱼个体的状态;步骤d:比较各人工鱼个体更新后的状态和公告板记录的状态,若人工鱼个体更新后的状态优于公告板记录的状态,则更新公告板记录的状态;步骤e:更新迭代次数;步骤f:若迭代次数小于最大迭代次数,重复执行步骤b~步骤e,直至迭代次数达到最大迭代次数,将公告板记录的状态设置为目标参数。5.根据权利要求4所述的三重四极质谱仪参数优化方法,其特征在于,所述预选状态,包括:觅食预选状态、聚群预选状态和追尾预选状态;所述觅食预选状态为人工鱼个体执行觅食行为,在视野范围内,随机选择前进一个步长距离对应的状态;所述聚群预选状态为人工鱼个体执行聚群行为,在视野范围内,向人工鱼群中心位置方向前进一个步长距离对应的状态;所述追尾预选状态为人工鱼个体执行追尾行为,在视野范围内,向适应度最大的人工鱼个体方向前进一个步长距离对应的状态。6.根据权利要求5所述的三重四极质谱仪参数优化方法,其特征在于,所述比较各人工鱼个体当前状态和所述预选状态,更新人工鱼个体的状态,包括:计算各人工鱼个体当前状态、所述聚群预选状态以及所述追尾预选状态的适应度;若所述聚群预选状态和/或所述追尾预选状态的适应度大于人工鱼个体当前状态的适应度,选取最大适应度对应的预选状态作为人工鱼个体的新状态;若所述聚群预选状态和所述追尾预选状态的适应度均小于人工鱼个体当前状态的适应度,选取所述觅食预选状态作为人工鱼个体的新状态。7.根据权利要求3所述的三重四极质谱仪参数优化方法,其特征在于,所述适应度为,
根据所述待优化参数对应的检测状态计算出来的目标函数值。8.根据权利要求1所述的三重四极质谱仪参数优化方法,其特征在于,还包括:根据质谱仪硬件电路所能达到的电压范围设置各待优化参数的边界值,所述待优化参数的调整不超过所述边界值。9.根据权利要求4所述的三重四极质谱仪参数优化方法,其特征在于,将所述待优化参数设置为人工鱼个体的状态前,将所述待优化参数归一化处理;当迭代次数达到最大迭代次数时,将公告板记录的状态去归一化处理,获取所述目标参数。10.一种三重四极质谱仪参数优化装置,用于实现权利要求1-9任意一项所述的方法,其特征在于,包括:预处理模块,被配置为获取待优化参数和所述质谱仪的检测状态,设置目标函数;计算模块,被配置为采用人工鱼群算法,根据所述目标函数和所述检测状态计算所述待优化参数的适应度;优化模块,被配置为根据所述适应度调整所述待优化参数,获取目标参数。
技术总结
本申请提供一种三重四极质谱仪参数优化方法及装置,根据待检测状态设置人工鱼群算法的目标函数,根据质谱仪硬件电路所能达到的电压范围设置各待优化参数的边界值;将所述待优化参数归一化为人工鱼个体状态,根据目标函数计算待优化参数的适应度,即人工鱼个体状态的适应度,根据适应度更新人工鱼个体状态,对待优化参数进行寻优,获取目标参数。本申请通过人工鱼群算法调整三重四极质谱仪的参数,根据检测状态对参数的调整进行约束,使质谱仪在较长时间范围内保持较优的检测状态,节省了质谱仪参数优化时间,提高工作效率。提高工作效率。提高工作效率。
技术研发人员:成晓亮 袁天文 徐强 张伟
受保护的技术使用者:南京品生医疗科技有限公司
技术研发日:2022.08.03
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。