1.本发明涉及感应电机技术领域,尤其涉及一种基于感应电机电磁-动力学耦合的建模方法。
背景技术:
2.据统计,感应电机故障案例中约44%与轴承相关,对感应电机早期轴承故障实施有效的状态监测和故障诊断对保证工业生产活动的平稳运行具有实用意义。
3.故障诊断环节所采取的方法一般区分为数据驱动方法和模型驱动方法。相对于数据驱动方法,通过模型模拟机器故障能够产生充足的代表性信号以满足数据驱动方法的数据量需求,避免大量故障试验在经济性上的考量。此外,故障模型对多种故障条件的模拟能力便于测试和比较诊断算法,并有助于理解机器中存在的物理关系。大多数诊断电机轴承故障的建模方法聚焦于轴承动力学模型的构建,进而分析振动信号中的时域和频域信息,以期发现映射故障类型和故障程度的信号特征。与动力学建模和振动信号分析相比,针对轴承故障电机建立电磁学模型并分析电流信号的研究较少。其中的许多研究通过构建电机模型来研究轴承故障。然而,大部分研究采用了信号模型对轴承的动力学特性进行了简化,忽略了轴承运行过程中的非线性因素,从而过度简化了电磁模型与动力学模型之间的耦合效应。
4.现有的一般研究中使用的电机建模方法,根据复杂度由低到高分别为d-q方法、多回路方法、磁等效方法和有限元方法。d-q模型等复杂度过低的模型面临着难以准确模拟多类电机故障的困难。而复杂的模型往往意味着更高的计算精度和时间成本,不利于实现基于模型驱动方法的在线故障诊断。例如,在sapena-bano等人的期刊文章《induction machine model with space harmonics for fault diagnosis based on the convolution theorem》中,仅计算电机电感一项,使用与多回路模型相关的绕组函数法和有限元方法所耗费的时间分别为7.571s和3h9min,所得计算结果却相差无几。
5.另外,多回路模型作为集总参数模型,其计算精度相对磁等效模型和有限元模型低,但其对电机的几何形状和绕组布局的考虑仍然使其适用于分析任意绕组分布和不对称情况下的感应电机。对于实际可能出现的几种机械和电气故障,多回路模型在可仿真故障类型与计算成本之比上则具有显著优势。然而,选用多回路理论针对轴承故障的建模研究仅局限于通过非均匀气隙分布信号模型来模拟轴承故障特性。信号模型忽略了轴承系统内部的多种非线性因素,将转子-轴承系统的动力学响应简化为特定函数,不利于得到反映实际物理情况的电机模型输出。通过联合电机电磁模型与动力学模型进行耦合建模,能够构建更加符合实际电-磁-力相互作用条件下的电机系统模型,避免信号模型的简化误差。据调查,对电机电磁学模型与动力学模型进行耦合建模的研究相对较少,仅有han等人在期刊文章《stator current model for detecting rolling bearing faults in induction motors using magnetic equivalent circuits》中提出了将磁等效模型与动力学模型耦合的方法,该方法计算成本较高、参数复杂。因此亟待提出将多回路模型应用至耦合模型的
方法。
技术实现要素:
6.本发明的目的在于提供一种基于感应电机电磁-动力学耦合的建模方法。
7.为实现上述发明目的,本发明提供一种基于感应电机电磁-动力学耦合的建模方法,包括:
8.s1.构建感应电机中转子-轴承动力学模型;
9.s2.基于所述转子-轴承动力学模型并以设定的故障状态为输入,获取所述感应电机中定子和转子间的径向气隙长度函数;
10.s3.根据所述感应电机的绕组结构获得所述定子和所述转子的匝函数,并基于所述匝函数和所述径向气隙长度函数获得所述感应电机的绕组函数,以及,基于所述匝函数,所述绕组函数和所述气隙长度函数计算出所述定子和所述转子的自感和互感;
11.s4.构建所述感应电机的多回路模型,并以所述定子和所述转子的自感和互感作为输入,计算所述感应电机的电机参数;
12.s5.将获取的所述电机参数反馈至所述转子-轴承动力学模型并重复执行步骤s3至s5,实现所述转子-轴承动力学模型与所述多回路模型的耦合与数值迭代计算,直至达到预设迭代条件输出耦合的所述转子-轴承动力学模型与所述多回路模型。
13.根据本发明的一个方面,步骤s1中,构建感应电机中转子-轴承动力学模型的步骤中,所述转子-轴承动力学模型包括:转子-轴承振动微分方程、恢复力方程和滚珠接触形变方程;其中,包括:
14.基于所述感应电机中转子模型和轴承模型构建所述转子-轴承振动微分方程;
15.基于所述轴承模型构建所述恢复力方程和滚珠接触形变方程。
16.根据本发明的一个方面,所述转子-轴承振动微分方程表示为:
[0017][0018][0019]
其中,mr为转子质量,c为转子阻尼,f
bxi
(i=1,2)为第i个轴承在x方向上的恢复力,f
byi
(i=1,2)为第i个轴承在y方向上的接触力,g为重力加速度;
[0020]
所述恢复力方程基于赫兹接触理论构建,其表示为:
[0021][0022][0023]
其中,f
bx
表示滚珠数为n
ball
的轴承在x方向上的总回复力;f
by
表示滚珠数为n
ball
的轴承在y方向上的总回复力;δj为第j个滚珠的接触形变;λj为第j个滚珠的接触系数;当δj>0时λj=1,否则λj=0;kc为接触刚度;θj为第j个滚珠角的位置;
[0024]
所述滚珠接触形变方程表示为:
[0025]
δj=x sinθj y cosθ
j-c
l-c
lj
[0026]
[0027][0028][0029][0030][0031]
其中,δj为第j个滚珠的接触形变;c1为轴承径向游隙;c
1j
为滚珠通过剥落位置时的附加径向间隙;db为滚珠直径;db为轴承节径;ωb为滚珠轨道角速度;α为接触角;ωr为转子角速度;h为考虑滚珠不接触剥落底部的等效剥落深度,w
apall
为剥落宽度,r0为轴承外圈半径,θ
spall
为剥落起始角位置,δθ
spall
为剥落角度。
[0032]
根据本发明的一个方面,步骤s2中,基于所述转子-轴承动力学模型并以设定的故障状态为输入,获取所述感应电机中定子和转子间的径向气隙长度函数的步骤中,包括:
[0033]
输入设定的故障状态,并根据所述滚珠接触形变方程计算轴承中各个滚珠的接触形变;
[0034]
基于所述接触形变,当前所述转子的转子角速度,以及所述恢复力方程获取所述转子在x、y方向上的恢复力;
[0035]
将获取的所述恢复力输入所述转子-轴承振动微分方程,获得所述转子在x、y方向上的偏心距和偏心角;
[0036]
基于获得的所述偏心距和偏心角获取所述定子和所述转子间的径向气隙长度函数。
[0037]
根据本发明的一个方面,基于获得的所述偏心距和偏心角获取所述定子和所述转子间的径向气隙长度函数的步骤中,包括:
[0038]
获取存在轴承故障时所述定子与所述转子间气隙长度的广义表达式,其表示为:
[0039][0040][0041]
其中,θs为定子机械角,g0为无偏心时的均匀气隙长度,e为轴承故障引入的偏心率,ψ(t)为考虑到缺陷位置随轴承内圈旋转发生变化而引入的角位置函数;
[0042]
获取所述转子在x、y方向上的偏心距和偏心角;其中,所述偏心距和所述偏心角分别表示为:
[0043][0044][0045]
将所述偏心距和所述偏心角引入所述气隙长度的广义表达式,以获得所述定子和所述转子间的径向气隙长度函数,其表示为:
[0046]
g(θs,t)=g
0-d
ecc
cos(θ
ecc-θs)。
[0047]
根据本发明的一个方面,步骤s3中,根据所述感应电机的绕组结构获得所述定子和所述转子的匝函数,并基于所述匝函数和所述径向气隙长度函数获得所述感应电机的绕组函数的步骤中,包括:
[0048]
分别获取所述定子和所述转子的匝函数;其中,对于单层绕组分布的定子,每相绕组的匝函数表示为:
[0049]
i=1:1:p/2
[0050]nstart
=2qs(i-1)/p
[0051][0052]
其中,zs为定子每绕组匝数;q
pp
为每极每相槽数,qs为总定子槽数;
[0053]
对于单根转子条的转子,其单根转子条的匝函数表示为:
[0054][0055]
其中,θ
bar
为转子条机械角位置,αr为相邻转子条间机械角度;
[0056]
基于所述定子和所述转子的匝函数和所述径向气隙长度函数获得所述感应电机的绕组函数,其表示为:
[0057][0058]
其中,〈g-1
(θs)〉表示气隙长度逆函数的平均值。
[0059]
根据本发明的一个方面,步骤s3中,基于所述匝函数,所述绕组函数和所述气隙长度函数计算出所述定子和所述转子的自感和互感的步骤中,包括:
[0060]
基于高斯定律和安培定律获取所述定子和所述转子之间任意线圈c1和线圈c2间的互感公式,其表示为:
[0061][0062]
其中,μ0为气隙磁导率,r为气隙中心半径,l为叠片长度,n
c1
(θs)为绕组c1的匝函数,n
c2
(θs)为绕组c2的绕组函数,g-1
(θs)为气隙长度逆函数;
[0063]
引入所述转子的转子机械角,并将所述互感公式转换为:
[0064][0065]
或者,
[0066][0067]
其中,θr表示转子机械角;
[0068]
基于所述匝函数,所述绕组函数、所述气隙长度函数和所述互感公式获取所述定子和所述转子的自感和互感。
[0069]
根据本发明的一个方面,步骤s4中,构建所述感应电机的多回路模型的步骤中,所述多回路模型包括:所述感应电机的电压方程,磁链方程、电磁转矩方程、动力学方程;其中,
[0070]
所述电压方程表示为:
[0071][0072][0073][0074][0075]
其中,us为定子电压向量;i
s,r
、r
s,r
和λ
s,r
分别为定转子的电流向量、电阻矩阵和磁链向量;u
sa,sb,sc
为定子的三相电压,i
sa,sb,sc
为定子三相绕组电流,rs为定子对称假设下的单相定子绕组电阻,λ
sa,sb,sc
为三相定子绕组上的磁链,nb为转子条数,rb为单根转子条电阻,re为端环电阻,i
ri
(i=1,2,
…
,nb)和λ
ri
(i=1,2,
…
,nb)分别为通过第i个转子回路的电流和磁链,ie和λe分别为通过端环的电流和磁链;
[0076]
所述磁链方程表示为:
[0077]
λs=l
ssis
l
sr
ir[0078][0079]
[0080][0081]
其中,l
ss
和l
rr
分别为定子自感矩阵和转子自感矩阵;l
sr
和l
rs
分别定子-转子互感矩阵和转子-定子互感矩阵,此处;l
sisj
(i=1,2,3;j=1,2,3)为定子相i与定子相j间的互感,l
sirj
(i=a,b,c;j=1,2,
…
,nb)为定子相i与第j个转子回路间的互感,l
rirj
(i=1,2,
…
,nb;j=1,2,
…
,nb)为第i个与第j个转子回路间的互感,lb和le分别为转子条和端环漏感;
[0082]
所述电磁转矩方程表示为:
[0083][0084]
其中,p为电机极数,θe为电角度;
[0085]
所述动力学方程表示为:
[0086][0087]
其中,j为转子转动惯量,ωr为转子角速度,t1为负载转矩。
[0088]
根据本发明的一个方面,步骤s4中,以所述定子和所述转子的自感和互感作为输入,计算所述感应电机的电机参数的步骤中,所述电机参数包括:转子角速度;
[0089]
步骤s5中,将获取的所述电机参数反馈至所述转子-轴承动力学模型并重复执行步骤s3至s5,实现所述转子-轴承动力学模型与所述多回路模型的耦合与数值迭代计算的步骤中,将所述电机参数中的所述转子角速度反馈至所述转子-轴承动力学模型并重复执行步骤s3至s5,实现所述转子-轴承动力学模型与所述多回路模型的耦合与数值迭代计算。
[0090]
根据本发明的一个方面,步骤s2中,所述故障状态为所述轴承的外圈故障,内圈故障,滚珠故障中的至少一种。
[0091]
根据本发明的一种方案,本发明提出的基于感应电机多回路模型和转子-轴承系统动力学模型的耦合建模方法,同时建立感应电机电磁学模型和考虑轴承径向间隙、赫兹接触等非线性因素的转子-轴承动力学模型,通过径向气隙长度和转子角速度作为耦合参数以进行迭代求解。由于多回路模型作为集总参数模型,在考虑了电机几何形状和绕组布局的同时,参数数量比磁等效模型和有限元模型更少,模型复杂度更低,因而能够有效节省计算资源且模拟电机在常见的电气和机械故障下的电机动态响应特性。有利于为故障机理研究和在线智能诊断方法提供快速的数据支持。
附图说明
[0092]
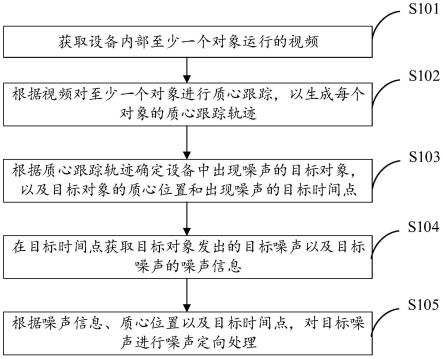
图1是示意性表示根据本发明的一种实施方式的建模方法的步骤框图;
[0093]
图2是示意性表示根据本发明的一种实施方式的建模方法的流程图;
[0094]
图3是示意性表示根据本发明的一种实施方式的感应电机的结构图;
[0095]
图4是示意性表示根据本发明的一种实施方式的转子-轴承系统结构图;
[0096]
图5是示意性表示根据本发明的一种实施方式的轴承外圈故障的结构图;
[0097]
图6是示意性表示根据本发明的一种实施方式的轴承故障类型的结构图;
[0098]
图7是示意性表示根据本发明的一种实施方式的定转子气隙分布图;
[0099]
图8是示意性表示根据本发明的一种实施方式的定子绕组等效电路图;
[0100]
图9是示意性表示根据本发明的一种实施方式的转子多回路模型图;
[0101]
图10是示意性表示根据本发明的一种实施方式的外圈故障仿真下转子y方向振动频谱对比(10hz)图;
[0102]
图11是示意性表示根据本发明的一种实施方式的外圈故障下定子电流仿真信号频谱对比(10hz)图;
[0103]
图12是示意性表示根据本发明的一种实施方式的外圈故障下定子电流仿真信号频谱对比(20hz)图;
[0104]
图13是示意性表示根据本发明的一种实施方式的内圈故障仿真下转子y方向振动频谱对比(10hz)图;
[0105]
图14是示意性表示根据本发明的一种实施方式的内圈故障下定子电流仿真信号频谱对比(10hz)图;
[0106]
图15是示意性表示根据本发明的一种实施方式的内圈故障下定子电流仿真信号频谱对比(20hz)图;
[0107]
图16是示意性表示根据本发明的一种实施方式的外圈故障下电机端盖振动实验信号频谱对比(10hz)图;
[0108]
图17是示意性表示根据本发明的一种实施方式的外圈故障下定子电流实验信号频谱对比(10hz)图;
[0109]
图18是示意性表示根据本发明的一种实施方式的外圈故障下电机端盖振动实验信号频谱对比(20hz)图;
[0110]
图19是示意性表示根据本发明的一种实施方式的外圈故障下定子电流实验信号频谱对比(20hz)图。
具体实施方式
[0111]
为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0112]
在针对本发明的实施方式进行描述时,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”所表达的方位或位置关系是基于相关附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
[0113]
下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
[0114]
结合图1和图2所示,根据本发明的一种实施方式,本发明的一种基于感应电机电磁-动力学耦合的建模方法,包括:
[0115]
s1.构建感应电机中转子-轴承动力学模型;
[0116]
s2.基于转子-轴承动力学模型并以设定的故障状态为输入,获取感应电机中定子和转子间的径向气隙长度函数;
[0117]
s3.根据感应电机的绕组结构获得定子和转子的匝函数,并基于匝函数和径向气隙长度函数获得感应电机的绕组函数,以及,基于匝函数,绕组函数和气隙长度函数计算出定子和转子的自感和互感;
[0118]
s4.构建感应电机的多回路模型,并以定子和转子的自感和互感作为输入,计算感应电机的电机参数;
[0119]
s5.将获取的电机参数反馈至转子-轴承动力学模型并重复执行步骤s3至s5,实现转子-轴承动力学模型与多回路模型的耦合与数值迭代计算,直至达到预设迭代条件输出耦合的转子-轴承动力学模型与多回路模型。
[0120]
如图3所示,根据本发明的一种实施方式,步骤s1中,构建感应电机中转子-轴承动力学模型的步骤中,构建一个三相四极感应电机的电机模型,基于该电机模型对其转子和安装在转子上的轴承进行结构分析,可知,转子转动故障通常由轴承上分布缺陷或局部缺陷引起分布缺陷往往存在于轴承组件上的各个位置,难以用确定的频率特征来表征。因此一般考虑单点缺陷等具有特定特征频率局部故障以对轴承故障进行研究。
[0121]
在本实施方式中,轴承的故障可分为三大类,其分别是:外圈故障、内圈故障、滚珠故障。其中,参见图4所示,将转子-轴承系统从感应电机模型中分离出来,并以轴承的外圈故障为例进行转子-轴承动力学模型的构建。
[0122]
在本实施方式中,转子-轴承动力学模型包括:转子-轴承振动微分方程、恢复力方程和滚珠接触形变方程;其中,包括:
[0123]
基于感应电机中转子模型和轴承模型构建转子-轴承振动微分方程;其中,转子-轴承振动微分方程表示为:
[0124][0125][0126]
其中,mr为转子质量,c为转子阻尼,f
bxi
(i=1,2)为第i个轴承在x方向上的恢复力,f
byi
(i=1,2)为第i个轴承在y方向上的接触力,g为重力加速度;
[0127]
基于轴承模型构建恢复力方程和滚珠接触形变方程;其中,参见图5所示,基于赫兹接触理论构建恢复力方程,其表示为:
[0128][0129][0130]
其中,f
bx
表示滚珠数为n
ball
的轴承在x方向上的总回复力;f
by
表示滚珠数为n
ball
的轴承在y方向上的总回复力;δj为第j个滚珠的接触形变;λj为第j个滚珠的接触系数;当δj>
0时λj=1,否则λj=0;kc为接触刚度;θj为第j个滚珠角的位置;
[0131]
在本实施方式中,滚珠接触形变方程基于轴承的纯滚动情况构建,其表示为:
[0132]
δj=x sinθj y cosθ
j-c
l-c
lj
[0133][0134][0135][0136][0137][0138]
其中,δj为第j个滚珠的接触形变;c1为轴承径向游隙;c
1j
为滚珠通过剥落位置时的附加径向间隙,其中通过半波正弦函数模拟获得;db为滚珠直径;db为轴承节径;ωb为滚珠轨道角速度;α为接触角;ωr为转子角速度;h为考虑滚珠不接触剥落底部的等效剥落深度,w
apall
为剥落宽度,r0为轴承外圈半径,θ
spall
为剥落起始角位置,δθ
spall
为剥落角度。
[0139]
如图6所示,根据本发明的一种实施方式,步骤s2中,故障状态为轴承的外圈故障,内圈故障,滚珠故障中的至少一种。在本实施方式中,故障状态在模型初始阶段以剥落部件(内圈、外圈、滚珠)、剥落位置(角度)、剥落宽度的数据形式输入。
[0140]
在本实施方式中,由于轴承故障可引起定子和转子之间的气隙变化,进而影响定转子(即定子和转子)电感从而影响定子电流,进而可基于轴承的故障状态为输入。
[0141]
结合图1和图2所示,根据本发明的一种实施方式,步骤s2中,基于转子-轴承动力学模型并以设定的故障状态为输入,获取感应电机中定子和转子间的径向气隙长度函数的步骤中,包括:
[0142]
输入设定的故障状态,并根据滚珠接触形变方程计算轴承中各个滚珠的接触形变;
[0143]
基于接触形变,当前转子的转子角速度,以及恢复力方程获取转子在x、y方向上的恢复力;
[0144]
将获取的恢复力输入转子-轴承振动微分方程,获得转子在x、y方向上的偏心距和偏心角;
[0145]
基于获得的偏心距和偏心角获取定子和转子间的径向气隙长度函数。在本实施方式中,参见图7所示,在轴承-转子系统动力学模型中被分解为两个方向上的转子径向位移决定了定子与转子间的气隙分布。严格地说,由于制造误差等原因,实际运行中的感应电机
其气隙往往是不均匀的,而轴承故障引起的转子附加径向位移则加剧了这种情况。随着感应电机运转,由于轴承故障导致的恢复力脉动引起转子的动态偏心,进而得到时变气隙。气隙的分布可以在历次数值迭代中计算得出。在本实施方式中,通过获取的径向气隙长度函数以实现在感应电机中电磁-动力学模型之间的耦合路径,其包括:
[0146]
获取前述的存在轴承故障时定子与转子间气隙长度的广义表达式,其表示为:
[0147][0148][0149]
其中,θs为定子机械角,g0为无偏心时的均匀气隙长度,e为轴承故障引入的偏心率(偏心率是轴承运行至缺陷位置产生偏心位移的大小,因为该部分内容为轴承故障定子电流特征频率的理论推导部分,该偏心率仅是一个假设常量),ψ(t)为考虑到缺陷位置随轴承内圈旋转发生变化而引入的角位置函数;在本实施方式中,获取了理想情况下存在轴承故障时气隙长度的表达公式。
[0150]
获取转子在x、y方向上的偏心距和偏心角;其中,由t时刻转子在两个方向上的位移,以分别获得转子的偏心距和偏心角,其中,偏心距和偏心角分别表示为:
[0151][0152][0153]
将偏心距和偏心角引入气隙长度的广义表达式,以获得定子和转子间的径向气隙长度函数,其表示为:
[0154]
g(θs,t)=g
0-d
ecc
cos(θ
ecc-θs)。
[0155]
在本实施方式中,通过动力学模型计算得到的两个方向上的位移xr、yr(即转子-轴承振动微分方程计算径向气隙长度函数所需要的变量xr、yr)计算得到偏心距d
ecc
和偏心角θ
ecc
,进而计算得到径向气隙长度函数g(θs,t)。
[0156]
根据本发明,通过获取的径向气隙长度函数与后续步骤中所获得的电感关联,进而可在多回路模型中影响定子电流,这是由转子-轴承系统动力学模型耦合至感应电机多回路模型的清晰路径。相应的,多回路模型的动力学行为反馈至转子-轴承动力学模型的过程通过转子转速参数的传递实现。因此,本发明通过气隙长度分布和转速将感应电机多回路模型与转子-轴承动力学模型耦合,即可得到感应电机的电磁-动力学耦合模型,
[0157]
结合图1和图2所示,根据本发明的一种实施方式,精确的电感计算是多回路模型正确建立的基础,定子、转子条和端环的漏感可以通过电机几何参数计算得到,但定转子时变的自感和互感通常难以测量或得到其准确估计。考虑到绕组结构决定了电机磁动势以及大部分气隙磁导,因此绕组函数法提供了利用电机绕组和气隙长度分布来计算电感的有效途径。同样地,在多回路模型的假设基础上,绕组函数法还扩展了一些必要假设:
[0158]
1.磁通径向穿过气隙,即轴向磁通忽略不计;
[0159]
2.磁性材料的磁导无限大;
[0160]
3.齿槽效应忽略不计。
[0161]
进而,基于以上假设展开定转子的自感和互感的计算过程。具体的,步骤s3中,根据感应电机的绕组结构获得定子和转子的匝函数,并基于匝函数和径向气隙长度函数获得感应电机的绕组函数的步骤中,包括:
[0162]
分别获取定子和转子的匝函数;其中,对于单层绕组分布的定子,每相绕组的匝函数表示为:
[0163]
i=1:1:p/2
[0164]nstart
=2qs(i-1)/p
[0165][0166]
其中,zs为定子每绕组匝数;q
pp
为每极每相槽数,qs为总定子槽数;
[0167]
对于单根转子条的转子,其单根转子条的匝函数表示为:
[0168][0169]
其中,θ
bar
为转子条机械角位置,αr为相邻转子条间机械角度;
[0170]
基于定子和转子的匝函数和径向气隙长度函数获得感应电机的绕组函数,其中,在绕组函数法的计算中,电机定转子的绕组分布通过匝函数来表示。匝函数表示某个定子绕组或转子回路在电机一侧的匝数空间分布,而绕组函数则表示某个定子绕组或转子回路由于通过电流而产生的磁动势空间分布,显然,绕组函数是关于匝函数和气隙长度的函数。因此,绕组函数表示为:
[0171][0172]
其中,〈g-1
(θs)〉表示气隙长度逆函数的平均值。
[0173]
结合图1和图2所示,根据本发明的一种实施方式,步骤s3中,基于匝函数,绕组函数和气隙长度函数计算出定子和转子的自感和互感的步骤中,包括:
[0174]
基于高斯定律和安培定律获取定子和转子之间任意线圈c1和线圈c2间的互感公式,其表示为:
[0175][0176]
其中,μ0为气隙磁导率,r为气隙中心半径,l为叠片长度,n
c1
(θs)为绕组c1的匝函数,n
c2
(θs)为绕组c2的绕组函数,g-1
(θs)为气隙长度逆函数;
[0177]
在电机中,考虑到定转子间的相对运动,引入转子的转子机械角,并将互感公式转换为:
[0178]
[0179]
或者,改写为关于时间t的函数:
[0180][0181]
其中,θr表示转子机械角;
[0182]
进而,基于前述获取的匝函数,绕组函数、气隙长度函数和互感公式获取定子和转子的自感和互感。
[0183]
结合图1和图2所示,根据本发明的一种实施方式,在以获取定转子的自感和互感情况下,进一步需要构建出关于感应电机的多回路模型,以实现转子-轴承动力学模型与多回路模型的耦合。在本实施方式中,多回路模型的建立依赖于以下假设:
[0184]
1.电机是由平衡的三相电压源供电的线性系统;
[0185]
2.忽略饱和、涡流损耗及摩擦损耗;
[0186]
3.转子条彼此绝缘。
[0187]
进而,步骤s4中,构建感应电机的多回路模型的步骤中,根据以上假设,进行多回路模型建立过程的描述。在本实施方式中,多回路模型包括:感应电机的电压方程,磁链方程、电磁转矩方程、动力学方程。
[0188]
其中,参见图8和图9通过将每相定子绕组等效为电阻和漏感串联电路,以及将笼型转子视为在空间中均匀分布的回路,采用星型连接的三相鼠笼感应电机的电压方程可以表示为:,
[0189][0190][0191][0192][0193]
其中,us为定子电压向量;i
s,r
、r
s,r
和λ
s,r
分别为定转子的电流向量、电阻矩阵和磁链向量;u
sa,sb,sc
为定子的三相电压,i
sa,sb,sc
为定子三相绕组电流,rs为定子对称假设下的单相定子绕组电阻,λ
sa,sb,sc
为三相定子绕组上的磁链,nb为转子条数,rb为单根转子条电阻,re为端环电阻,i
ri
(i=1,2,
…
,nb)和λ
ri
(i=1,2,
…
,nb)分别为通过第i个转子回路的电流和磁链,ie和λe分别为通过端环的电流和磁链;
[0194]
进一步的,定转子磁链方程表示为:
[0195]
λs=l
ssis
l
sr
ir[0196]
[0197][0198][0199]
其中,l
ss
和l
rr
分别为定子自感矩阵和转子自感矩阵;l
sr
和l
rs
分别定子-转子互感矩阵和转子-定子互感矩阵,此处;l
sisj
(i=1,2,3;j=1,2,3)为定子相i与定子相j间的互感,l
sirj
(i=a,b,c;j=1,2,
…
,nb)为定子相i与第j个转子回路间的互感,l
rirj
(i=1,2,
…
,nb;j=1,2,
…
,nb)为第i个与第j个转子回路间的互感,lb和le分别为转子条和端环漏感;
[0200]
进一步的,由线性电机系统的磁共能公式可推导得到电磁转矩方程的矩阵形式,其表示为:
[0201][0202]
其中,p为电机极数,θe为电角度;
[0203]
进一步的。动力学方程表示为:
[0204][0205]
其中,j为转子转动惯量,ωr为转子角速度,t1为负载转矩。
[0206]
根据本发明,在多回路模型中,电感通过磁链与电流相耦合,而气隙长度分布影响定转子电感矩阵,且气隙长度波动可以通过轴承-转子动力学模型求解得出。因此,气隙长度可视为多回路模型和动力学模型的公共参数,通过参数传递实现多回路和轴承-转子动力学耦合模型的数值计算。
[0207]
根据本发明的一种实施方式,步骤s4中,以定子和转子的自感和互感作为输入,计算感应电机的电机参数的步骤中,电机参数包括:转子角速度;
[0208]
步骤s5中,将获取的电机参数反馈至转子-轴承动力学模型并重复执行步骤s3至s5,实现转子-轴承动力学模型与多回路模型的耦合与数值迭代计算的步骤中,将电机参数中的转子角速度反馈至转子-轴承动力学模型并重复执行步骤s3至s5,实现转子-轴承动力学模型与多回路模型的耦合与数值迭代计算。
[0209]
为了验证耦合模型的有效性,本发明对实验使用的三相二极感应电机(marathon d391)进行轴承故障仿真。感应电机定子绕组结构为单层,多回路模型以及转子-轴承系统模型的参数分别由表1感应电机多回路模型参数和表2转子-轴承动力学模型参数给出。
[0210][0211][0212]
表1
[0213][0214]
表2
[0215]
对于表2中给出的skf6203轴承参数,其故障特征频率可以由前述的单点缺陷分类及其特征频率公式计算得到。轴承的外圈故障频率为f
om
=3.0681fr,内圈故障频率为f
im
=4.9319fr,滚珠故障频率为f
bm
=4.0594fr。在耦合模型中模拟了外圈故障和内圈故障两种
故障类型,其中外圈故障的剥落位置设置为θ
spall
=0
°
以确保滚珠与剥落位置的有效接触。由于内圈上的剥落随转子旋转,因此内圈故障不受剥落的初始位置影响。
[0216]
首先,对外圈故障进行了仿真分析。图10显示了10hz电源频率供电时转子y方向(等同于轴承内圈y方向)上的振动频谱,其中将正常和外圈故障两种情况进行了对比。由对比可知,带有外圈故障的轴承动力学模型整体振动幅度比正常情况更高,同时在外圈故障频率及其谐波频率处具有突出幅值,这一现象符合真实轴承外圈故障的振动特征。值得注意的是,正常情况下的振动频谱在外圈故障特征频率处也具有突出幅值,这是由于轴承自身特性决定的。在滚动体随轴承运转而发生周向运动的过程中,后一个滚动体j运动到前一个滚动体j 1的位置时轴承中的滚动体排列出现了重复,意味着轴承柔度(或刚度)存在一定的周期性。因此,相关文献称之为变柔度(varying compliance,vc)振动。vc频率在单列轴承中恰好等于滚珠通过频率,也等于轴承外圈故障频率。
[0217]
图11和图12给出了通过电磁-动力学耦合模型仿真得到的两种电源频率下的定子电流频域图像,其中将正常和外圈故障两种情况作了对比。从对比中可以看到,轴承故障频率通过耦合路径反映在定子电流频谱中。在电源频率及其谐波成分之外,尽管外圈故障特征频率由于轴承参数原因接近于部分电源谐波频率,外圈故障条件下的电流频谱仍然在部分特征频率处明显高于正常状况。部分特征频率,如f
om-fs,2f
om
fs,3f
om
fs等,在两种供电频率下均具有较好的反映外圈故障的性能。
[0218]
其次,对内圈故障进行了仿真分析。内圈故障情况下转子y方向的振动频谱如图13所示,其中内圈故障特征频率及其倍频幅值明显。由于内圈剥落在轴承运转过程中以转子转速旋转,因而使得内圈故障特征频率及其倍频周围存在大量调制边带。这些调制边带间的间隔恰好为转子转频。此外,内圈故障在vc频率处并未引起明显幅值增益,侧面反映了外圈故障频率与vc频率的重合关系。
[0219]
图14和图15中显示的内圈故障情况下的定子电流频谱具有比外圈故障更复杂的频率成分,与内圈故障中存在的转速调制相关。在频谱中可以查找到包含前述公式(定子电流的故障特征频率公式和内圈故障特征频率公式)在内的多个轴承故障特征频率,如f
im-f
s-fr,f
im
fs等,一定程度上验证了这些特征频率公式的有效性。此外,由于转速调制使得原本集中在内圈故障特征频率处的有限能量分散至其他频率成分中,内圈故障特征频率及其谐波频率处的幅值比外圈故障要低。较低的振动幅度通过气隙波动反映至定子电流中的特征频率分量幅值同样较低,这意味着通过特征频率幅值检测轴承内圈故障难度相对检测外圈故障难度更高。
[0220]
为进一步验证本发明的耦合模型的有效性,采用构建试验平台的方式进行。
[0221]
在本实施方式中,通过在机械故障综合模拟实验台上进行。实验台主要由感应电机、变频器、制动器、光电传感器构成。光电传感器用于获取电机转子转速。fluke i200s交流电流钳用于测量定子三相绕组上的电流信号。电机端盖振动信号由imi 608a11加速度传感器测量。通过在外滚道内侧切割凹槽以模拟轴承外圈剥落故障,剥落宽度3mm。
[0222]
图16和图17分别显示了在10hz电源频率下电机驱动端端盖的振动频谱和定子电流频谱。振动频谱中,在转频及其倍频以外,可以观察到显著的轴承外圈故障特征分量,即外圈剥落表现出了显著的动力学特性。由于测量系统未完全接地,引入了50hz的传感器供电频率。在定子电流频谱中,由于变频器输出的电源电压非理想正弦波形,电源基频的倍频
分量幅值明显高于仿真频谱。电源相关频率周围存在的调制边带可能是由于转矩波动产生。排除上述干扰分量,在轴承外圈故障特征频率处的幅值增益仍然可见。尽管由于噪声等仿真模型中难以考虑到的原因,实验信号中的特征频率幅值低于仿真信号,但实验信号与仿真信号的特征频率吻合情况较好。特征频率f
om-fs,2f
om
fs,4f
om
fs等处均存在较为明显的由外圈故障产生的幅值增益。在相同的实验条件下采用20hz的电源频率供电,其振动频谱和定子电流频谱分别如图18、19所示。其振动频谱中仍然显著体现了外圈故障特征。在定子电流频谱中,特征频率f
om-fs,3f
om-fs,4f
om
fs处存在明显幅值增益。以上实验结果初步验证了电机轴承故障特征频率推导和电磁-动力学耦合模型的有效性。
[0223]
上述内容仅为本发明的具体方案的例子,对于其中未详尽描述的设备和结构,应当理解为采取本领域已有的通用设备及通用方法来予以实施。
[0224]
以上所述仅为本发明的一个方案而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。