1.本发明涉及汽车技术领域,特别是涉及一种基于驾驶员驾驶经验的碰撞预警方法、装置及汽车。
背景技术:
2.随着车联网技术c-v2x的迅速发展,汽车基于c-v2x技术感知外界的能力,越来越强。c-v2x高可靠性、低延时的特点,基于c-v2x的汽车主动安全越来越受到重视。《合作式智能交通系统车用通信系统应用层及应用数据交互标准》(这里简称v2x应用层国标)构建的不同场景预警应用,其中碰撞预警功能包括前向碰撞预警、交叉路口碰撞预警、盲区预警、逆向超车预警等,受极高的关注。
3.基于v2x的碰撞预警功能前向碰撞预警、交叉路口碰撞预警、盲区预警、逆向超车预警等,目前最小安全距离模型参数(包括:驾驶员反应时间、制动协调时间等)都是使用固定的值,没有考虑到不同经验的驾驶员,所需的驾驶员反应时间、制动协调时间是不一样的。如果使用同一个安全距离模型参数的值,并不适用于各种经验等级的驾驶员。
技术实现要素:
4.本发明的目的在于,提出一种基于驾驶员驾驶经验的碰撞预警方法、装置及汽车,根据不同驾驶员的驾驶经验信息,来自动调节不同的驾驶员反应时间、制动协调时间,提高驾驶员对碰撞预警体验的满意度和准确度。
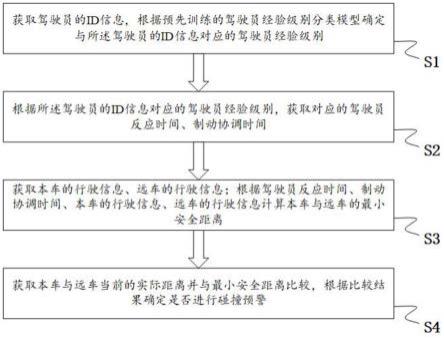
5.一方面,提供一种基于驾驶员驾驶经验的碰撞预警方法,包括以下步骤:
6.步骤s1,获取驾驶员的id信息,根据预先训练的驾驶员经验级别分类模型确定与所述驾驶员的id信息对应的驾驶员经验级别;
7.步骤s2,根据所述驾驶员的id信息对应的驾驶员经验级别,获取对应的驾驶员反应时间、制动协调时间;
8.步骤s3,获取本车的行驶信息、远车的行驶信息;根据驾驶员反应时间、制动协调时间、本车的行驶信息、远车的行驶信息计算本车与远车的最小安全距离;
9.步骤s4,获取本车与远车当前的实际距离并与最小安全距离比较,根据比较结果确定两车是否进行碰撞预警。
10.优选地,在步骤s1中,所述驾驶员经验级别分类模型的训练过程具体包括:
11.收集多个的驾驶员驾驶经验样本数据;
12.将驾驶员驾驶经验样本数据根据预设的预处理规则进行预处理,并对数据进行归一化处理;
13.对驾驶员驾驶经验样本数据进行驾驶员经验级别标记;所述驾驶员经验级别至少包括新手驾驶员级别、有经验驾驶技术好级别、有经验违章多级别;
14.选取部分的驾驶员驾驶经验样本数据作为训练样本,并将剩余的驾驶员驾驶经验样本数据作为测试样本,输入预设的svm支持向量机模型进行训练;
15.将训练后的支持向量机模型输出为驾驶员经验级别分类模型,保存在车辆的v-box中。
16.优选地,在步骤s1中,所述驾驶员经验级别分类模型的训练过程还包括:
17.获取不同驾驶员经验级别的驾驶员反应时间、制动协调时间,并计算出各级别驾驶员的平均反应时间、平均制动协调时间;
18.根据预设的修正规则对各级别驾驶员的平均反应时间、平均制动协调时间进行适当的修正或调整,得到各级别驾驶员的预设反应时间、预设制动协调时间;
19.将各级别驾驶员对应的预设反应时间、预设制动协调时间存储在车辆的v-box中。
20.优选地,在步骤s1中,所述确定与所述驾驶员的id信息对应的驾驶员经验级别具体包括:
21.根据驾驶员id信息获取驾驶员驾驶经验信息,并根据预设的预处理规则进行预处理;
22.将预处理后的驾驶员驾驶经验信息输入驾驶员经验级别分类模型,确定该驾驶员id信息对应的驾驶员经验级别。
23.优选地,在步骤s2中,所述获取对应的驾驶员反应时间、制动协调时间具体包括:
24.根据驾驶员id信息对应的驾驶员经验级别,查询各级别驾驶员对应的预设反应时间、预设制动协调时间,获取驾驶员id信息对应的驾驶员反应时间、制动协调时间。
25.优选地,在步骤s3中,根据以下公式计算本车与远车的最小安全距离:
[0026][0027]
其中,vs为本车车速;vf为远车车速;as的含义为本车的纵向加速度;t为驾驶员反应时间;t1为制动协调时间;t2为减速度增长时间;d0为静止时安全距离。
[0028]
优选地,所述步骤s4包括:本车与远车当前的实际距离与最小安全距离比较,若当前的实际距离小于等于最小安全距离,则判定有碰撞危险,输出碰撞预警信息,对驾驶员进行预警。
[0029]
优选地,所述步骤s4还包括:若当前的实际距离大于最小安全距离,则判定无碰撞危险,无需进行预警。
[0030]
另一方面,还提供一种基于驾驶员驾驶经验的碰撞预警装置,通过所述的基于驾驶员驾驶经验的碰撞预警方法对车辆进行预警。
[0031]
另一方面,还提供一种汽车,通过所述的基于驾驶员驾驶经验的碰撞预警装置进行碰撞预警。
[0032]
综上,实施本发明的实施例,具有如下的有益效果:
[0033]
本发明提供的基于驾驶员驾驶经验的碰撞预警方法、装置及汽车,通过从交通安全云平台或是其他平台获取驾驶员驾驶经验信息,然后通过svm支持向量机的算法,对驾驶员驾驶经验级别进行分类;针对不同的驾驶经验级别,查表获得不同的驾驶员反应时间、制动协调时间;根据本车和远车的gps定位、速度、方向盘转角等信息,并结合本车驾驶员反应时间、制动时间,来计算本车和远车是否有碰撞的可能,是否进行碰撞预警。能够根据不同驾驶经验驾驶员,提供不同的预警时机,提高驾驶员对碰撞预警效果的满意度。
附图说明
[0034]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本发明的范畴。
[0035]
图1为本发明实施例中一种基于驾驶员驾驶经验的碰撞预警方法的主流程示意图。
[0036]
图2为本发明实施例中驾驶员经验级别分类模型的训练示意图。
[0037]
图3为本发明实施例中各级别驾驶员对应的预设反应时间、预设制动协调时间的计算逻辑示意图。
[0038]
图4为本发明实施例中车辆制动的示意图。
具体实施方式
[0039]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
[0040]
如图1所示,为本发明提供的一种基于驾驶员驾驶经验的碰撞预警方法的一个实施例的示意图。在该实施例中,所述方法包括以下步骤:
[0041]
步骤s1,获取驾驶员的id信息,根据预先训练的驾驶员经验级别分类模型确定与所述驾驶员的id信息对应的驾驶员经验级别;可以理解的是,驾驶员通过账号或者人脸识别等方式登陆车辆,车辆记录驾驶员的id等身份信息,该id信息可以唯一识别驾驶员,并可以对应到交通安全云平台或其他类似平台;后续将根据该驾驶员id信息到交通安全云平台或其他类似平台查询驾驶员的驾驶经验信息,通过驾驶经验信息就可以确定驾驶员的经验级别,进而确定后续的反应时间和制动协调时间,进行预警判断。
[0042]
具体实施例中,如图2所示,驾驶员经验级别分类模型的训练过程具体包括:
[0043]
收集多个的驾驶员驾驶经验样本数据;具体地,驾驶经验样本数据包括:驾照获取时间、驾驶员年龄、驾驶员性别、超速次数、超速频度、闯红灯次数、穿红灯频度、追尾次数、追尾频度、酒驾次数、累计里程数等信息;具体信息种类可以根据实际获取的信息进行调整;
[0044]
将驾驶员驾驶经验样本数据根据预设的预处理规则进行预处理,包括去除异常数据、去除重复数据、补充缺失值,将非数值类型转换为数值,并对数据进行归一化处理;
[0045]
对驾驶员驾驶经验样本数据进行驾驶员经验级别标记,可通过人工或者通过聚类算法进行标记,可根据具体实际情况选择标记方式,可根据需要将驾驶员标记新手驾驶员级别、有经验驾驶技术好级别、有经验违章多级别等;
[0046]
选取部分的驾驶员驾驶经验样本数据作为训练样本,并将剩余的驾驶员驾驶经验样本数据作为测试样本,输入预设的svm支持向量机模型进行训练;
[0047]
将训练后的支持向量机模型输出为驾驶员经验级别分类模型,保存在车辆的v-box中。其中,收集经验样本数据和进行模型训练的过程可以在云端或其他车辆外部的服务器上执行,根据实际需要的频率执行模型的训练操作,通过ota或者其他技术定期更新车辆保存的支持向量机模型。
[0048]
具体地,如图3所示,在完成模型训练之后,需要对不同驾驶员经验级别对应的反应时间、制动协调时间对应表设置,具体过程为:
[0049]
获取不同驾驶员经验级别的驾驶员反应时间、制动协调时间,并计算出各级别驾驶员的平均反应时间t
*
、平均制动协调时间t
1*
;
[0050]
根据预设的修正规则(根据实际测试或试验标定)对各级别驾驶员的平均反应时间、平均制动协调时间进行适当的修正或调整,得到各级别驾驶员的预设反应时间t、预设制动协调时间t1;
[0051]
将各级别驾驶员对应的预设反应时间t、预设制动协调时间t1存储在车辆的v-box中。例如可采用如下表方式进行存储,驾驶员经验级别a:对应的反应时间a1是2s,制动协调时间b1是1s;驾驶员经验级别b:对应的反应时间a2是0.8,制动协调时间b2是0.5s;驾驶员经验级别c:对应的反应时间a3是1.3s,制动协调时间b3是0.7s,
[0052]
驾驶员经验级别反应时间t制动协调时间t1aa1b1ba2b2ca3b3
[0053]
再具体地,进行以上训练的模型和对应的时间设置,就可以根据驾驶员id信息获取驾驶员驾驶经验信息,并根据预设的预处理规则进行预处理;将预处理后的驾驶员驾驶经验信息输入驾驶员经验级别分类模型,确定该驾驶员id信息对应的驾驶员经验级别。可以理解的是,每次车辆启动时,根据驾驶员id信息从交通安全云平台或是其他平台获取驾驶员驾驶经验信息,信息包括驾照获取时间、驾驶员年龄、驾驶员性别、超速次数、超速频度、闯红灯次数、穿红灯频度、追尾次数、追尾频度、酒驾次数、累计里程数等信息。以上信息仅为列举,可以根据实际获取的信息进行调整,但信息需要与支持向量机模型所需的数据项一致;将驾驶员id对应的驾驶经验信息进行预处理;将预处理后的的驾驶经验信息输入v-box中支持向量机模型,通过支持向量机模型预测/估计该驾驶员id对应的驾驶员经验级别,如新手驾驶员、有经验驾驶技术好、有经验违章多等级别;只需要在每次车辆启动时执行一次。
[0054]
步骤s2,根据所述驾驶员的id信息对应的驾驶员经验级别,获取对应的驾驶员反应时间、制动协调时间;可以理解的是,根据驾驶员id对应的驾驶员经验级别,查询/获取对应的驾驶员经验级别的反应时间t(预设反应时间)、制动协调时间t1(预设制动协调时间),本操作只需要在每次车辆启动时执行一次。
[0055]
步骤s3,获取本车的行驶信息、远车的行驶信息;根据驾驶员反应时间、制动协调时间、本车的行驶信息、远车的行驶信息计算本车与远车的最小安全距离;可以理解是,根据驾驶员经验级别对应的驾驶员反应时间t、制动协调时间t1,以及远车和本车的车速、加速度、方向盘转角、定位数据等信息,计算最小安全距离。
[0056]
具体实施例中,计算最小安全距离的方法可参考《合作式智能运输系统车用通信系统应用层及应用数据交互标准》(tcsae 53-2017)附录c的描述:采用车辆间最小安全距离模型,说明车辆制动过程如图4所示。
[0057]
根据汽车制动动力学,以前向碰撞算法的最小安全距离模型为例:
[0058][0059]
其中,vs为本车车速;vf为远车车速;as的含义为本车的纵向加速度;t为驾驶员反应时间;t1为制动协调时间;t2为减速度增长时间;d0为静止时安全距离。
[0060]
步骤s4,获取本车与远车当前的实际距离并与最小安全距离比较,根据比较结果确定两车是否进行碰撞预警。可以理解的是,根据最小安全距离、本车和远车当前的实际距离,计算两辆是否有碰撞危险,是否需要进行碰撞预警。本车和远车当前的实际距离小于等于最小安全距离,则有碰撞危险,将在hmi屏幕显示碰撞预警消息或做声音提示。
[0061]
具体实施例中,本车与远车当前的实际距离与最小安全距离比较,若当前的实际距离小于等于最小安全距离,则判定有碰撞危险,输出碰撞预警信息,对驾驶员进行预警。若当前的实际距离大于最小安全距离,则判定无碰撞危险,无需进行预警。
[0062]
本发明的实施例,还提供的一种基于驾驶员驾驶经验的碰撞预警装置,通过所述的基于驾驶员驾驶经验的碰撞预警方法对车辆进行预警,具体实现过程可参考上述基于驾驶员驾驶经验的碰撞预警方法的过程,在此不再赘述。
[0063]
本发明的实施例,还提供的一种汽车,通过所述的基于驾驶员驾驶经验的碰撞预警装置对车辆进行预警,具体实现过程可参考上述基于驾驶员驾驶经验的碰撞预警方法/装置的过程,在此不再赘述。
[0064]
综上,实施本发明的实施例,具有如下的有益效果:
[0065]
本发明提供的基于驾驶员驾驶经验的碰撞预警方法、装置及汽车,。
[0066]
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。