1.本发明涉及热电性能测试领域,具体而言,涉及一种同时测量面向与法向热流的高时空分辨率温度传感器,更具体地,涉及测量面向以及法向热流的温度测量系统以及测量热流的方法。
背景技术:
2.高超声速飞行器是指飞行马赫数大于5的飞行器。其凭借高速以及高机动性特征,在实现超远距离的精准快速打击的同时还具有高突防成功率,因而具有巨大的军事价值。在高马赫数下,飞行器所处的气动环境将具有十分复杂的热、流特性。
3.具体的,在流动方面,高超声速飞行器的飞行高度一般在40-70km之间,位于临近空间区域。空气的低密度使得空气分子的平均自由程相较于飞行器本身尺度已不能忽略,连续性介质假定可能不再成立,常规的数值计算方法可能不再适用;其次,高超声速飞行器的前缘会产生脱体激波,气体被剧烈压缩将其动能转化为热能,导致局部温度急剧升高,同时气流与飞行器表面的摩擦也将进一步升高温度,气动加热可使飞行器前缘温度达到2000~3000k。同时,在高温以及气体分子高速碰撞的影响下,气体将出现振动热容变化、离解和电离的情况,因此不可视为理想气体,需要考虑高温真实气体效应。上述复杂的流动状态、局部高温、化学反应和辐射加热等效应会导致非线性、高频振荡的传热特性。目前,复杂气动环境下的高超声速飞行器的传热特性越来越受到重视,精确预测飞行器的复杂气动加热特性并进行有效的热防护和热设计对保证飞行器的安全运行至关重要。
4.为满足上述精准预测的要求,相关技术中常见的研究方法有以下三种:理论预测、地面试验以及自由飞行实验。在理论预测方面,传统的计算流体力学方法难以给出复杂气动加热条件下准确的流动图像。g.a.bird于1969年提出了dsmc方法。dsmc虽不直接求解boltzmann方程,但是其直接模拟boltzmann方程描述的物理过程,通过对碰撞和运动解耦以简化计算,并预先设定分子间作用势模拟碰撞效果,最后将分子的运动进行统计平均再得到宏观量的变化规律;类似地,分子振动热容、电离、离解或热辐射等因素都可以在一定条件下进行模拟。经过50多年的研究,dsmc方法获得了广泛的应用。即便如此,dsmc方法虽然直接从分子运动论的角度出发,但其结果不一定最接近真实情况,尤其在临近空间复杂气动加热条件下,强烈的化学反应、辐射等非线性作用将显著影响计算精度。并且大规模dsmc计算极端消耗计算机资源,限制了其在工程中的实际应用。
5.综上,目前的理论预测方法难以解决复杂流动、气动加热和传热问题,精确的实验测量是重要的研究手段。在热测量方面,接触式的点热流测量和非接触式的面热流测量是两种主要方法。接触式测量方法主要有以下两种:(1)薄膜热流传感器:其主要应用在热流较低以及较好的流场条件下,具有较高的精度,不确定度一般在
±
5%~
±
8%。其响应速度最快在毫秒量级,但碍于薄膜材料有耐温限制,无法长时间在高温条件下工作;(2)同轴热电偶:主要在高温高压等恶劣工况条件下使用,具有耐冲刷、可重复使用、输出大、性能稳定和较高信噪比的优点,但传感器的尺寸大,响应时间长,空间和时间精度不高。
6.非接触式方法的主要原理为利用相机系统对温敏源进行感知,实现对实验模型表面温度的采集。其空间分辨率较高,并且具有形象直观、使用方便以及对原有热场干扰小的特点。温敏源主要有温敏漆、温敏磷光涂料、热色液晶和红外辐射等,利用温敏材料测温的不确定度约为
±
10%~
±
12%。但温敏材料的厚度对测量精度和信噪比的影响较大,精度随着厚度的增加而降低,另外受制于温敏材料的耐温限制以及高温下材料脱落的问题,该方法不能测量高温物体。另一种红外辐射测温方法需要首先确定材料表面的发射率,难以准确测量表面特性未知并伴随高温化学反应的样品。
7.值得注意的是,当马赫数很高时,飞行器表面的流态将出现很强的局域性。高超声速飞行器沿程不同位置的流动特性都不相同,表面气流的流动和传热特性存在显著的局域化特点,局部气体漩涡的特征尺寸在毫米甚至微米量级。强烈的气动加热和复杂流动效应将导致气流在不同流域之间的微小扰动被放大,出现流场和温度场的高频震荡现象,特征时间在微秒量级。此外,高超声速飞行器在飞行过程中外部环境恶劣,高频震荡、局部高温、化学腐蚀和大温差变形都会显著缩短传感器的使用寿命。目前已有的接触式或非接触式热测量方法都无法同时满足局域化、高时空精度和长期稳定工作的要求。
8.因此需要设计一种具有微米尺度空间分辨率、微秒量级时间响应以及高机械强度的传感器。
技术实现要素:
9.为解决上述的技术问题,本发明提出一种能够同时测量面向热流与法向热流的高时空分辨率温度传感器以及测量方法。该方法可以解决高超声速飞行器表面气动热特性难以测量的问题,对高速飞行器的热防护与热设计提供监测数据。
10.有鉴于此,本发明提出了一种测量面向以及法向热流的温度测量系统。该系统可以用于模拟稀薄流域复杂气动热环境的测量情况,能够精确测量面向热流与法向热流,具有高时空分辨率。该系统包括:测温单元以及高温火焰实验台,其中,所述高温火焰实验台包括乙炔高温火焰发生器以及定位组件,所述定位组件靠近所述乙炔高温火焰发生器设置,所述定位组件上固定有所述测温单元,所述测温单元包括基板以及至少一组测温元件,所述测温元件包括白金薄膜温度传感器。
11.在本发明的一个方面,本发明提出了一种测量面向以及法向热流的温度测量系统。该系统包括:测温单元、数据采集单元以及高温火焰实验台,其中,所述高温火焰实验台包括乙炔高温火焰发生器以及定位组件,所述定位组件靠近所述乙炔高温火焰发生器设置,所述定位组件上固定有所述测温单元,所述测温单元包括基板以及至少一组测温元件,所述测温元件具有金属薄膜电极,所述数据采集系统和所述测温单元电连接。该系统可以较好地模拟高超声速飞行器表面的气动热特性,测温单元具有好的面向以及法向热流跟随性以及敏感性,且空间、时间分辨率均较高。
12.根据本发明的实施例,所述金属薄膜电极由白金薄膜形成,所述金属薄膜电极包括第一电极块以及第二电极块,所述第一电极块和所述第二电极块之间通过蛇形部连接,所述蛇形部的线宽为10-3微米。由此,该测温传感单元可以具有好的热流传感效果。
13.根据本发明的实施例,所述金属薄膜电极的厚度为200-80nm。
14.根据本发明的实施例,所述测温单元的宽度以及长度分别独立地为80-200微米。
15.根据本发明的实施例,所述测温单元的基板为氮化铝陶瓷。
16.根据本发明的实施例,所述基板为四边形基板,所述测温单元包括4组所述测温元件,所述测温元件分列在所述四边形基板的四角。
17.根据本发明的实施例,该系统进一步包括恒温单元,所述恒温单元包括恒温真空腔,与所述恒温真空腔相连的分子泵,所述恒温真空腔内具有用于放置所述测温单元的恒温台,以及多个可独立供电的、用于与所述测温单元相连的电极。
18.根据本发明的实施例,所述恒温单元进一步具有检测电路结构,所述检测电路结构具有可接入所述测温单元的端口,所述检测电路至少包括可变电阻、固定电阻以及至少两个电压表,所述固定电阻、可变电阻以及所述测温单元串联,所述至少两个电压表分别用于检测所述固定电阻和所述测温单元的电压。
19.在本发明的又一方面,本发明提出了一种利用前面所述的温度测量系统测量热流的方法。该方法包括:
20.获取测温单元中的测温元件在不同温度下、功率为0时的电阻值,并拟合获得电阻-温度线性响应关系,以及所述测温单元的初始电阻,并根据所述电阻-温度线性响应关系的斜率以及所述初始电阻,获得所述测温单元的电阻温度系数β,并获得所述测温元件的温度测量值的修正关系:
21.t=t0 δr/(r0β);
22.将所述测温单元置于高温火焰实验台中,依靠定位组件移动所述测温单元的位置,以获取所述测温单元距离乙炔高温火焰发生器不同距离下的温度,并根据所述温度测量值的修正关系获取高温乙炔火焰的热流数据。
23.该方法可以较好地获取高温乙炔火焰的热流数据,进而可以较好的模拟高超声速飞行器表面的气动热特性,适于获取高超声速飞行器表面气动热特性。
24.根据本发明的实施例,所述测温元件的温度测量值的修正关系是通过将所述测温单元置于恒温单元内获取的:在所述恒温单元内的恒温台接入固定电压的前提下,控制所述恒温单元内恒温台中和所述测温元件连接的电极,以改变所述测温元件的输入电压,并利用电压表分别测量和所述测温单元串联的固定电阻以及所述测温元件的电压变化,以获取不同温度下所述测温元件的电阻和功率数据,绘制r-p图,得到功率p=0时所述测温元件的电阻值;在所述恒温台不外加电压时,测得常温下所述测温元件的初始电阻r0;改变所述恒温台的接入电压,以获取多组温度和所述测温元件在功率为0时的电阻值,并进行拟合得到所述测温元件的电阻-温度线性响应关系,并获取所述测温单元的电阻温度系数β:
25.β=δr/(r0δt)
26.其中,δr为电阻-温度线性响应关系中任意两点之间的电阻差。
附图说明
27.图1是根据本发明一个实施例的测温单元结构示意图;
28.图2是根据本发明一个实施例的光学显微镜下的测温单元;
29.图3是根据本发明一个实施例的测温单元数码照片;
30.图4是根据本发明一个实施例的标定电路接线情况;
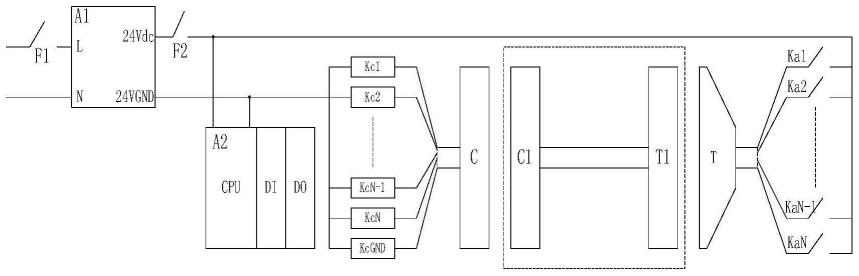
31.图5是根据本发明一个实施例的面向热流测量时电路接线情况;
32.图6是根据本发明一个实施例的温度测量系统的结构示意图。
具体实施方式
33.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中相同或类似的标号表示相同或类似的元件。下面将结合实施例对本发明的方案进行解释。本领域技术人员将会理解,下面的实施例仅用于说明本发明,而不应视为限定本发明的范围。实施例中未注明具体技术或条件的,按照本领域内的文献所描述的技术或条件或者按照产品说明书进行。所用试剂或仪器未注明生产厂商者,均为可以通过市场购得的常规产品。
34.在本发明的一个方面,本发明提出了一种测量面向以及法向热流的温度测量系统。该系统可以用于稀薄流域复杂气动热环境,能够精确测量面向热流与法向热流,具有高时空分辨率。参考图6,该系统包括:测温单元(铂金测温传感器)以及高温火焰实验台,其中,所述高温火焰实验台包括乙炔高温火焰发生器以及定位组件(如图中所示出的x以及y定位标尺),所述定位组件靠近所述乙炔高温火焰发生器设置,所述定位组件上固定有所述测温单元,所述测温单元包括基板以及至少一组测温元件,所述测温元件包括白金薄膜温度传感器。该系统能够实现同时测量面向与法向热流的高时空分辨率温度测量。为方便理解,下面首先对该方法所采用的传感器的结构进行简单说明:
35.本发明所提出的方法采用的传感器使用微米尺度的铂金薄膜作为测温元件,具体可以采用高能电子束激发物理气相沉积技术制作pt薄膜,厚度为100nm左右,使用紫外光刻技术制作pt薄膜的蛇形结构,其中最小线宽可以达到5μm,单个测温单元的尺寸可在100μm
×
100μm左右。使用紫外光刻技术制作pt薄膜的蛇形结构,这种结构可以增加单位面积的pt薄膜长度以提高灵敏度,铂金在200-1300摄氏度的大温度范围内均保持良好的电阻—温度线性响应关系,化学性质稳定、重复性好,通过测量pt薄膜的电阻变化就可以准确获得温度的改变。pt薄膜沉积在厚度为127μm左右的致密氮化铝陶瓷薄片上,由此该传感器能够达到微米量级的空间分辨率。氮化铝陶瓷薄片的机械强度高,因此传感器具有较高的机械强度。氮化铝陶瓷材料具有良好的机械强度、高热导率200—300w m-2
k-1
和低热膨胀系数等优点,可以保证pt薄膜传感器在强烈的气动加热条件下不会损坏,满足热流传感器长期在线工作的要求。一个氮化铝陶瓷片上可设置多个测温元件,构成如图1中所示出的测温单元。由于测温元件尺寸达到微米量级,通过理论计算,纯白金传感器可以实现微秒量级的时间分辨率。单层的测温单元可以用于测量物体的面向热流以及局部温度,双层贴合的测温单元可以用于测量物体的法向热流。该传感器的尺寸小,便于实现局域化测量,多传感器布置则能保证实现阵列形式的温度、热流检测,特别适用于研究复杂流动、气动加热和传热问题过程中的热测量。
36.进一步地,该系统还可以包括恒温单元,所述恒温单元包括恒温真空腔,与所述恒温真空腔相连的分子泵,所述恒温真空腔内具有用于放置所述测温单元的恒温台,以及多个可独立供电的、用于与所述测温单元相连的电极。所述恒温单元进一步具有检测电路结构,所述检测电路结构具有可接入所述测温单元的端口,所述检测电路至少包括可变电阻、固定电阻以及至少两个电压表,所述固定电阻、可变电阻以及所述测温单元串联,所述至少两个电压表分别用于检测所述固定电阻和所述测温单元的电压。该恒温单元可以用于获取测温元件的温度测量值的修正关系,并对测温单元的传感器性能进行检测评估。
37.具体的,该测温单元的制备过程可以如下:
38.使用高纯铂金(pt)作为靶源,如纯度为99.9999%的pt,用高能电子束激发物理气相沉积技术制作pt薄膜作为传感器用于测温(即测温元件),pt薄膜的厚度为100nm。使用紫外光刻技术制作pt薄膜的蛇形结构,pt薄膜沉积在厚度为127μm的致密氮化铝陶瓷薄片上。这种结构可以增加单位面积的pt薄膜长度以提高灵敏度。参考图1,测温元件可以具有两个电极以及连接两个电极之间的蛇形部,图1中示出了根据本发明一个实施例的测温单元的示意图,即在氮化铝陶瓷片上制作了4组测温元件的情况,4组测温元件分列在陶瓷片的四角位置处。参考图2以及图3,测温单元中蛇形部的最小线宽仅为5μm,单个测温单元的尺寸为100μm
×
100μm。
39.为方便理解,下面首先对利用该系统的温度传感方法,以及该方法可包含的对测温单元的传感器性能进行检测评估的具体步骤进行说明。具体的,该方法可以包括以下步骤:
40.s100:将测温单元置于恒温真空腔内,对测温元件进行温度标定
41.根据本发明的实施例,在该步骤中,将测温单元置于恒温真空腔内,对测温元件进行温度标定。测温单元的结构可以为如前所述的,即在氮化铝陶瓷薄膜上设置多组pt薄膜电极,如在4角上设置共4组。使用恒温真空腔对测温单元进行固定,并将测温元件和真空腔进行电连接,如用铜线与银胶连接pt薄膜电极与真空腔,进而保证pt薄膜电极在测量过程的稳定性。随后将测温元件连入测量电路,通过控制恒温台两侧的输入电压来获得不同的环境温度,以对测温元件进行温度标定。
42.具体地,恒温真空腔内可以设置多个独立的电极供通电检测,例如可设置12个独立电极。真空腔内还可以连接两级分子泵,从而可以保持10-4
pa的高真空度,避免空气对流影响标定结果,恒温台可以保证0.001k控温精度。恒温台的结构实测温电路可以包括电源、变阻箱、固定电阻以及测温单元,测温电路可包括电源、变阻箱、固定电阻以及测温单元串联,测温单元固定在恒温台上,在固定电阻与测温单元上各加上一个电压表检测电压。具体地,测温电路的等效电路可以如图4中所示出的,固定电阻r1和测温元件(如图中所示出的r2)串联,测温单元固定在恒温台上,在固定电阻与测温元件上各加上一个电压表检测电压(如图中所示出的v1和v2)。
43.根据本发明的实施例,可以通过控制恒温台两侧的输入电压,来控制恒温台内的温度,从而获得不同的环境温度。在电压改变(即环境温度改变)后静置30min,随后使用真空腔内的热电偶读取腔内温度,作为测温元件达到的温度。而后对测温元件的输入电压进行从大到小的变化,分别测量固定电阻r1和测温元件的电压变化,对变温后测温元件的电阻数据进行处理,绘制r-p图,得到功率p=0时测温元件的电阻值,该值可以反映薄膜传感器仅在环境下测到的温度值,进而用于排除外接电压的干扰。
44.随后,可多次改变恒温台的接入电压,改变pt测温元件温度,得到不同温度时固定电阻与传感器的电压值。随后计算它们功率p=0时的电阻值,进而获取多组温度和测温元件在功率为0时的电阻值,并进行拟合得到pt测温元件的电阻-温度线性响应关系。
45.根据本发明的实施例,在获得pt测温单元的电阻-温度线性响应关系之后,即可获取该线性关系的线性曲线斜率。此时可以测得常温下测温元件的初始电阻r0(恒温台不外加电压,测温元件两侧的电压为十几毫伏级别),根据获得的初始电阻以及线性曲线斜率,
由电阻温度系数关系式得到可测温单元的电阻温度系数β:
46.β=δr/(r0δt),
47.其中,δr为电阻-温度曲线中任意两点之间的电阻差。例如,在固定电阻r1为150欧姆,测温元件具有前述结构时,可得到测温元件的电阻温度系数β=0.0017477。
48.测温元件的温度测量值可依据前面获得的电阻-温度线性响应关系曲线,根据下式进行修正:
49.t=t0 δr/(r0β)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式1
50.其中,t0为测得初始电阻r0时的温度。
51.s200:获取测温单元对面向热流的响应情况,并获取热流密度的分辨率
52.根据本发明的实施例,在该步骤中,为测量传感器对面向热流的响应情况,可以取相邻pt测温元年对位于中央的测温元件进行面向温度响应的测量,同时求得热流密度的分辨率。
53.具体地,在该步骤中,取相邻pt测温元件对其进行面向温度响应的测量,给一个测温元件加上相对较大的电压,作为热源端;给另一侧的测温元件对加上相对较小的电压,用来测量得到其温度的变化。具体的,将两组测温元件分别接在如图5所述的测量电路中。随后,在该步骤中,首先保证小电压组测温元件电路中电源电压不变,改变大电压组测温元件两端的电压,使之温度逐渐增大,此时热流会从高温区域流向低温区域,导致小电压铂金测温元件的局部温度升高,电阻相应增加,通过准确测量电阻变化可以获得温升数据,即在不同的电压下,可通过如图5中所示出的电压表1和电压表2获取不同温度下r1以及r2的电压值,计算不同温度下测温元件的电阻,并带入前述的式1中,计算获取t值,进而获得温度-电阻的线性关系。
54.根据本发明的实施例,在该步骤中可以选择两组测温元件进行重复性实验,验证具有前述结构的测温元件对面向热流相应的跟随性和灵敏性。具体地,可以将前述施加大、小电压的测温元件进行互换,得到两组测温元件的升温数据,进而测试该测温元件的温度同步线性变化。两组升温数据获得的升温直线一致性高,可知该测温元件对面向热传导现象敏感,测温元件对温度变化的跟随性、灵敏性较好,pt薄膜构成的传感器测温重复性优异,稳定性强,适合在复杂的气动条件下作为局部热流的测温单元。并且,因为前述的铂金传感器单元仅有100nm厚度,最小5μm线宽,传感器自身热容量极小,响应时间在微秒量级,从而保证不同位置测温单元之间没有时间滞后,具有良好的同步性。
55.根据本发明的实施例,面向热流测量值q可以是通过以下方式确定的:将同一平面上两个相邻测温元件测量的温度分别记为t1和t2,间距为l(如图1中所示出的相邻的两个测温元件的蛇形部拐点之间的直线距离),取实验中最小功率下的温升,则面向热流测量值为:
[0056][0057][0058]
其中λ是陶瓷薄片的热导率。使用高精度测温平台对测温元件进行温度标定,结果表明测温单元的测温精度可以达到0.001k,热流密度分辨率计算为110w/m2。
[0059]
由于测温元件距离十分接近,导致了小温差大热流的情况,而在实际应用中,传感器的测温间距定然要比10-3
大2-3个数量级,此时热流测量精度还会进一步提高,因此基于前述的测温元件可以进行高精度的面向热流测量。
[0060]
热流测量的不确定度可以通过误差传递公式测算,不确定度和热导率不确定度(λ)、测量间距不确定度(x)、电压(即固定电阻以及待测电阻(测温元件)下式中的u1和u2)不确定度相关,具体地:
[0061][0062]
其中仿真计算的热导率不确定度估计为3%。因此热流测量的不确定度也优于10%。由此可见,前述的结构用于测量面向热流具有很好的测定精度。
[0063]
s300:获取测温单元对法向热流的响应情况
[0064]
根据本发明的实施例,在该步骤中,测评测温单元对法向热流的响应情况。具体地,为测量传感器对法向热流的响应情况,将两个测温单元通过热导胶贴合,令两组如图1中所示出的测温单元通过导热胶粘结,两个测温单元中的pt薄膜一侧和导热胶相接触,随后将该相对的白金传感器用银胶及铜丝与真空腔连接,将其连入测量电路,测量传感器对法向热流的响应情况。在进行法向热流响应情况的检测过程中,保持测温单元为垂直状态。
[0065]
根据本发明的实施例,测量响应的电路连接及测量方法与面向响应测量一致,在此不再赘述。由前述的步骤得到跟随侧的传感器反应灵敏,能及时测量到温度变化。
[0066]
s400:通过comsol有限元仿真软件进行仿真实验,以获得测温单元中pt以及氮化铝的热导率
[0067]
发明人发现,经过大量实验证实,通过厚度为纳米级别的薄膜的导热系数明显地低于常规尺度材料的数值,而由于本发明所提出的方法采用的测温元件,即传感器的设计尺寸较小,因此在计算热流时,即使已知温差和距离差,却也无法计算准确的热流值。因此,在该步骤中,首先通过comsol有限元仿真软件进行仿真实验,获得该测温单元中白金和氮化铝的热导率。具体的,pt的热导率为26w m-2
k-1
,氮化铝热导率230w m-2
k-1
。下面简述获取前述热导率的过程:
[0068]
首先,将前述步骤中测量面向响应温度实验中所得的数据作为建模的数据参考。该模型分为三层,从上到下分别为沉积白金层(100nm)、氮化铝陶瓷片层(0.127mm)以及氧化铝陶瓷片层(4.5cm),其中沉积白金层和氮化铝陶瓷片层为传感器部分,氧化铝陶瓷片层为恒温台的材料。建模的几何建立与实际测温单元尺寸1:1对应建立,在仿真中,建立恒温台用于设置边界条件,故仅取样品尺寸表面积的氧化铝陶瓷片层,进而能够减少网格数目,提高求解速度。该仿真以求解白金薄层及氮化铝陶瓷片层的热导率为目的,故将这两个参数设为λ
pt
和λ
ain
。由常物性、稳态、三维且有内热源的温度场控制方程(下面示出的)可以知道温度场与材料的密度和热容无关:
[0069][0070]
在为几何模型赋予材料参数后,要为其设置边界条件。该仿真在固体传热模块中进行,首先将模型温度初始值设定为环境温度t0=300.85k,将氧化铝陶瓷片的底部设置为
环境温度,其余表面设置为热绝缘。由于白金沉积在氮化铝陶瓷片上非致密,故而沉积界面存在界面热阻,通过调试,确定白金与氮化铝接触界面的间隙热导率r=2.1
×
107wm-2
k-1
。
[0071]
此时为两组电极分别加上热源,由实验测量结果能够获得加在两个测温单元上的不同功率,由可获得外加热源的大小,其中p为功率,v为白金丝的体积。
[0072]
通过comsol对面向响应情况的仿真,使仿真值和实验值间的误差最小,计算得到白金热导率为26w m-2
k-1
,氮化铝热导率为230wm-2
k-1
,热接触间隙热导率为2.1
×
107wm-2
k-1
。体材料白金的热导率约为70w m-2
k-1
。由此可知,薄膜材料的热导率会比体材料低,与现有研究结果相吻合。氮化铝陶瓷片的热导率在200-300wm-2k-1,因此计算值合理。当白金与氮化铝陶瓷片的接触界面无缝隙时,间隙热导率有无穷大,但由于实际操作时无法做到零间隙,且高能电子束激发物理气相沉积法制作的材料间隙极小,因此该间隙热导率也在合理范围内。
[0073]
s500:通过数据拟合获取测温元件的响应时间
[0074]
根据本发明的实施例,在该步骤中,使用数据采集卡测量传感器温度随时间的变化,通过数据拟合出瞬态传热的响应时间t=0.66s。由于此时白金沉积在氮化铝陶瓷片上,大量热能从高热导率的陶瓷片处耗散,因此该响应时间仅代表带氮化铝陶瓷片的传感器的情况,通过理论推导能够得到传感器的响应时间为1.3
×
10-7
s,故从理论上,该测温元件可以实现微秒量级的时间分辨率。
[0075]
具体的,悬架铂金薄膜传感器有利于进一步提高时间测量精度,但悬架微米传感器机械强度不高,很容易在测量过程中断裂,且耐高温性能不好。故根据本发明实施例的方法选择使用陶瓷片支撑的微米传感器,一方面提高了传感器的机械强度,另一方面还大幅提高了器件的耐高温性能。由于陶瓷片的尺寸和热容远大于铂金微米传感器,使得陶瓷片支撑传感器达到稳态的时间较长。
[0076]
具体的,在该步骤中,使用数据采集卡ni-pxi-5592对通电后的测温元件进行电压测定。电路连接与面向响应实验相同,仅连接一个测温单元,该测温单元大约在6s时,传感器测温达到稳定值。使用comsol仿真,在稳态模型的基础上加上密度和比容的参数设定便能够计算瞬态传热问题,对计算出来的仿真值使用matlab对该曲线进行拟合,得到响应时间为0.66s。
[0077]
如前所述,由于此时白金沉积在氮化铝陶瓷片上,大量热能从高热导率的陶瓷片处耗散,因此该响应时间仅代表带氮化铝陶瓷片的传感器的情况。而从理论分析,铂金微米传感器的尺寸在微纳米量级,热容量极小,测温的时间分辨率极高,以下为其推导过程:
[0078]
∵q=haδt
[0079][0080][0081]
故从理论上可以得出纯白金传感器能够达到微秒量级的响应时间,可以实现微秒量级的时间分辨率。
[0082]
综上,具有前述结构的测温单元以及测温元件,可具有较快的响应时间,并对面向
以及法向热流均具有好的相应灵敏度以及跟随性,适用于测定模拟高超声速飞行器所处的气动环境中的热流特性。
[0083]
下面,根据本发明的具体实施例,对利用前述的测温单元对模拟超高速飞行器的气动飞行条件下的热流进行测定的方法进行详细介绍:
[0084]
根据本发明的实施例,为模拟高超声速飞行器的气动飞行条件,本发明设计提供了和超高速飞行器气动热效应作用相当的乙炔火焰平台,通过搭建高温火焰实验台让传感器在变换位置中测量温度的变化,观察测温单元的灵敏度和跟随性。该平台的结构示意图如图6所示出的。选用乙炔高温火焰来模拟气动加热效应,乙炔燃烧温度可以达到3200℃,和超高速飞行器气动热效应作用相当。为了模拟高超声速飞行器的气动飞行条件,通过搭建如图6所示出的高温火焰实验台,可以使得测温单元在变换位置中测量温度的变化,从而可以观察测温单元的灵敏度和跟随性。类似地,在测定中将测温单元接入如图6所示出的等效电路中,对于温度响应的变化,可以通过使用数据采集卡对固定电阻电压及传感器两端电压进行采集,通过改变传感器距离火焰的位置,观察所得电压值的变化,根据标定结果,将电压值变化转变为电阻,并带入前述的式1中获取测温单元获得的温度变化。
[0085]
具体地,参考图6,该高温火焰实验台包括乙炔高温火焰发生器,以及定位组件。其中,定位组件包括第一方向定位标尺和第二方向定位标尺,第一方向可为图中所示出的x方向,第二方向为图中所示出的y方向。定位组件和测温单元相连,用于控制测温单元的位置,并可直接读出两次移动之间测温单元在第一、第二方向上移动的位移。在测温过程中,移动测温单元的位置,令其远离或是靠近乙炔高温火焰发生器,从而获得测温单元周围温度的升高或是降低。由于采用了乙炔火焰为热源,该过程可以较好的模拟高超声速飞行器的气动加热效应。
[0086]
从实验结果,可以得出传感器测量温度的跟随性强,温度响应灵敏。由于该测温单元远离火焰时,火苗运动的干扰随着距离增大可以忽略不记,故而在温度下降曲线中,整体下降趋势明显,没有较大的波动。数据采集卡的数据采集存在一些干扰,温度的波动一方面受到气流运动的影响,另一方面还受到噪声等干扰影响。受限于传感器与导线的连接方式及在位置控制支架上的连接方式,过近的距离会让银胶融化,让胶布燃烧,故而控制距离,让其温度不超过150℃。
[0087]
根据本发明的实施例,测试实验结果体现该传感器有很高的时间分辨率和温度测量精度,火焰加热的瞬态波动和细节都可以清晰捕捉,充分体现气动加热实验台的优点,能够较好地评估传感器的性能,体现传感器优异的响应特性,在实际应用中能够进行固体壁面温升和热流的局域化测量,多点布置传感器则能够获得沿程温度和热流的分布图。
[0088]
需要说明的是,本发明不局限于上述具体实施方式,本发明中提出的一种能够测量面向与法向热流的高时空分辨率温度传感器及方法可广泛应用于热电性能测试及与之相关的其它领域,可以采用其它多种具体实施方式实施本发明,凡是采用本发明的设计思想,做一些简单变化或更改的设计,都落入本发明保护的范围。
[0089]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。