1.本发明属于雷达技术领域,具体的说是涉及一种针对雷达系统的多干扰机协同压制资源调度方法。
背景技术:
2.多站雷达系统通常由多个空间广泛分布的雷达组成,它们分别工作在不同的模式和频段下,并协同工作以完成各种任务。与传统的单基地雷达相比,多站雷达系统具有更好的目标跟踪和检测性能、波形分集增益和空间分集增益等优势。这些优势使得多站雷达系统能够在电子对抗环境中实现对敌方目标的反侦察及干扰目标的探测识别。
3.多站雷达系统优越的抗干扰性能使得传统单站干扰策略难以实现理想的干扰性能。因此,协同干扰技术应运而生。多部干扰机通过自适应调度干扰资源,如干扰机的数量、模式和功率等,组成干扰协同网络,并实现对多站雷达系统的有效干扰。相较于传统的单机干扰,多干扰机协同干扰能最大程度地发挥干扰系统的多模式特性,形成高性能的干扰架构,从而提升整体对抗水平。
4.近年来,协同干扰资源调度问题已被很多学者讨论和研究。然而,传统方法是基于准确获取雷达参数的假设下,但在实际应用中,受限于参数估计的精度,通过估计方法获得的雷达参数存在偏差。这导致计算的性能指标与实际性能指标之间存在着泛化误差,并降低了干扰资源优化分配算法的性能。
技术实现要素:
5.本发明的目的是克服现有技术的不足,提供一种针对雷达系统的多干扰机协同压制资源调度方法。
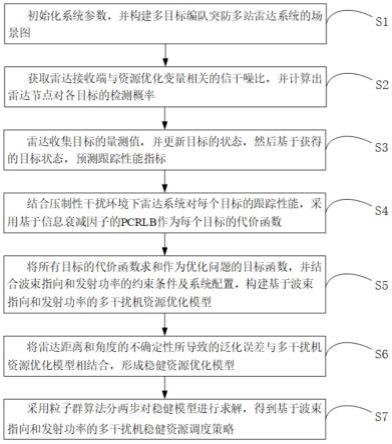
6.本发明的技术方案是:一种针对雷达系统的多干扰机协同压制资源调度方法。包括以下步骤:
7.s1、构建系统模型
8.初始化系统参数:包括各相控阵雷达的位置、突防目标和干扰机在各时刻的位置及坐标、干扰机每帧最多产生的波束个数、各时刻干扰波束的指向、干扰机发射功率的上下限、总的干扰功率。构建多目标编队突防多站雷达系统的场景图;
9.s2、获取信干噪比及检测概率:
10.根据步骤s1中构建的系统模型,获取雷达接收端与资源优化变量相关的信干噪比,并计算出雷达节点对各目标的检测概率。
11.s3、收集数据并更新状态
12.雷达在压制性干扰环境中以步骤s2获取的检测概率探测目标,收集目标的量测值,并更新目标的状态。然后基于获得的目标状态,预测跟踪性能指标。
13.s4、建立代价函数,
14.结合压制性干扰环境下雷达系统对每个目标的跟踪性能,采用基于信息衰减因子
的pcrlb作为每个目标的代价函数。
15.s5、构建优化模型:
16.将所有目标的代价函数求和作为优化问题的目标函数,并结合波束指向和发射功率的约束条件及步骤s1中确定的系统配置,构建基于波束指向和发射功率的多干扰机资源优化模型。
17.s6、加入泛化误差,形成稳健模型:
18.将雷达距离和角度的不确定性所导致的泛化误差与步骤s5构建的基于波束指向和发射功率的多干扰机资源优化模型相结合,形成稳健资源优化模型。
19.s7、求解模型:
20.采用粒子群算法分两步对稳健模型进行求解,得到基于波束指向和发射功率的多干扰机稳健资源调度策略。
21.进一步的,所述步骤s1的具体方法为:
22.假定雷达系统由m个相控阵雷达组成,其中雷达m(m=1,2,
…
,m)的坐标为(xm,ym)。在跟踪时刻k,g个目标执行突防任务,其中目标g(g=1,2,
…
,g)位于速度为n(n《m)个干扰机伴飞目标,组成干扰支援编队,对雷达系统实施协同干扰。其中干扰机n(n=1,2,
…
,n)在k时刻的坐标为速度为干扰机n最多同时产生l个干扰波束,每个波束的发射功率被约束在[e
min
,e
max
]的范围内,总功率为e
sum
。
[0023]
进一步的,所述步骤s2的具体方法为:
[0024]
对多干扰机系统的两个参数进行调度:干扰波束分配向量θk=(θ
n,m,k
)n×m和波束发射功率向量ek=(e
n,m,k
)n×m,其中波束指向是一个二元分配向量:
[0025][0026]
发射功率e
n,m,k
和波束指向θ
n,m,k
相互耦合,具体关系如下:
[0027][0028]
雷达m从目标g接收到的回波信号功率为:
[0029][0030]
其中,o
m,t
和λ分别表示雷达m的发射功率,天线主瓣增益和雷达工作波长。
[0031]
雷达m从干扰机n接收到的干扰信号功率为:
[0032][0033]
其中,为干扰机n的天线增益;λf为干扰信号波长;为雷达接收机n在方向上的天线增益;γ为极化失配损失。
[0034]
雷达m被多个干扰机干扰后,在其接收机处目标g的sjnr可以表示为
[0035][0036]
其中,em代表雷达接收机的内部噪声。
[0037]
假定已经确定了目标起伏的类型和背景噪声的统计分布,则雷达m对目标g的检测概率可以通过计算获得。选用swerling i型目标为例,检测概率为
[0038][0039]
其中,v
t
代表检测阈值。
[0040]
进一步的,所述步骤s3包括以下子步骤:
[0041]
s31、雷达收集目标的量测值;
[0042]
s32、更新目标状态并预测跟踪性能指标。
[0043]
进一步的,s31雷达收集目标的量测值,具体实现方法为:
[0044]
假设目标遵循线性匀速(constant velocity,cv)运动模型,可以表示为
[0045][0046]
其中,为k时刻目标g的状态向量;f表示状态转移矩阵;代表协方差为的均值为零的高斯过程噪声,定义分别如下
[0047][0048][0049]
其中,k为过程噪声强度;
△
t为跟踪时间间隔;为克拉克罗积运算;i2为2
×
2的单位矩阵。
[0050]
雷达在压制性干扰环境中以的检测概率探测目标。此时,第m个雷达收集到的第g个目标的量测值为
[0051][0052]
其中,为第m个雷达检测到第g个目标的检测概率,且为一个非线性函数,
[0053][0054]
进一步的,s32更新目标状态并预测跟踪性能指标,具体实现方法为:
[0055]
雷达系统会发射多个波束以收集目标量测值并更新目标的状态。对于目标状态的
估计值,采用扩展卡尔曼滤波算法(extended kalman filter,ekf)进行计算。具体的,ekf算法主要包括两个过程:目标状态的更新及预测。首先,对于目标状态更新,第g个目标在k时刻的预测为
[0056][0057]
对于压制干扰环境中的情况,雷达系统采集第g个目标的个量测值。目标状态的估计值可以由下式给出
[0058][0059]
其中,为k时刻第g个目标的卡尔曼增益,用于调节估计和预测的平衡。其次,可以得到第g个目标在时间间隔k 1内的一步预测结果,即
[0060][0061]
进一步的,所述步骤s4的具体方法为:
[0062]
采用pcrlb作为雷达系统量化单目标跟踪性能的代价函数,并将步骤s2中获得的目标检测概率作为压制性干扰场景中的信息衰减因子(information reduction factor,irf)。通常,对fisher信息矩阵(fisher information matrix,fim)求逆,并取矩阵对角元素的和,即可计算出pcrlb,表达式如下
[0063][0064]
其中,表示fim,它可以分为两个部分
[0065][0066]
其中和分别代表先验信息和量测数据的fim,
[0067][0068][0069]
其中,为期望函数,为目标量测的雅克比矩阵。
[0070]
进一步的,所述步骤s5的具体方法为:
[0071]
根据步骤s4中每个目标的代价函数,将其求和作为多干扰机资源优化模型的目标函数:
[0072][0073]
其中θk=(θ
n,m,k
)n×m为干扰波束分配向量;ek=(e
n,m,k
)n×m为波束发射功率向量;为目标g的pcrlb。
[0074]
因此,基于波束指向和发射功率的多干扰机资源优化模型可以建立为:
[0075]
[0076][0077]
优化模型的约束条件来自步骤s1中预设的系统配置。其中,约束1和2表示发射功率和干扰波束相互耦合,e
min
为波束发射功率的下限,e
max
为波束发射功率的上限;约束3表示同一时刻对同一部雷达干扰时,每个干扰机最多分配一个波束;约束4表示多干扰机系统的总功率是一定的,e
sum
为干扰机n总的干扰功率。约束5表示每台干扰机在k时刻发射的干扰波束最多为l个;约束6表示,每个雷达被干扰的波束数量最多为q个。
[0078]
进一步的,所述步骤s6的具体方法为:
[0079]
将雷达距离和角度的不确定性所导致的泛化误差与步骤s5构建的基于波束指向和发射功率的多干扰机资源优化模型相结合,形成稳健资源优化模型。
[0080]
不确定区间为
[0081][0082][0083]
其中,和分别表示雷达m的预测距离和角度;和分别为雷达m和目标g之间距离不确定性的上界和下界;表示方位角的估计范围,上下界分别为和
[0084]
结合距离和角度这两个不确定性因素,整个系统的参数不确定性可表示为
[0085][0086]
采用极大极小化(min-max)准则将单个目标的pcrlb过渡到衡量整体系统的跟踪性能度量指标。则稳健优化方法等效于最大化最佳参数的跟踪误差,相应的目标函数由下式给出
[0087][0088]
对于距离不确定性由于与的四次方成正比,的最大值在处获得。因此,稳健优化模型的目标函数可以转化为
[0089][0090]
对于角度不确定性采用凸松弛算法进行求解。由于与成反比,其最大值在上得到。此时,基于和的稳健干扰资源优化模型建立如下
[0091][0092][0093]
进一步的,所述步骤s7包括以下子步骤:
[0094]
s71、求解波束指向分配结果;
[0095]
s72、求解发射功率分配结果。
[0096]
进一步的、s71求解波束指向分配结果,具体实现方法为:
[0097]
假设所有的雷达节点都可以被干扰到,并且干扰机均匀分配发射功率由于变量θk是二元的,并且是一个非凸优化约束。因此,可以将非凸优化约束θ
n,m,k
∈{0,1}转换为凸优化约束0≤θ
n,m,k
≤1,从而得到凸松弛优化问题。
[0098][0099][0100]
上式构建的优化模型可以采用粒子群算法(particle swarm optimization,pso)进行求解,并得到松弛优化结果然后,定义初始波束指向分配矩阵将中对应索引的元素设置为1,并将中的最大值用0替换。循环上述步骤,直到分配给所有雷达的干扰波束资源满足要求,则停止当前时刻的分配操作,得到波束指向次优分配结果
[0101]
进一步的、s72求解发射功率分配结果,具体实现方法为:
[0102]
在步骤s71中获得波束指向分配结果后,优化模型可以转化为
[0103][0104][0105]
同理,采用pso求解该优化模型得到次优发射功率分配策略至此,多干扰机系统的稳健干扰资源分配问题得以解决。
[0106]
本发明的有益效果是,本发明的方法能实时考虑当前态势,调整干扰机波束指向和发射功率的资源分配。并且考虑了雷达参数波动引起的泛化误差,将雷达距离和角度的不确定性与资源优化模型相结合,形成稳健优化资源调度模型,有效地压制了多站雷达系统,降低雷达系统对多目标的跟踪性能。解决现有方法未考虑雷达参数不确定性导致的泛化误差会影响干扰资源分配结果的问题,可以应用于电子对抗,目标突防等雷达领域。
附图说明
[0107]
图1为本发明一种针对雷达系统的多干扰机协同压制资源调度方法的流程图。
[0108]
图2为本发明具体实施方式采用雷达距离和角度的不确定性模型的示意图。
[0109]
图3为本发明具体实施方式采用多干扰机协同压制多站雷达系统的场景图。
[0110]
图4-6为本发明具体实施方式得到的三个干扰机波束指向和发射功率的资源分配结果图。
[0111]
图7为本发明具体实施方式与均匀分配算法、传统优化算法所得三个目标的pcrlb对比图。
[0112]
图8为本发明具体实施方式与均匀分配算法、传统优化算法所得三个目标的检测概率对比图。
具体实施方式
[0113]
本发明所有的步骤、结论都在matlab r2021a上验证正确。下面结合附图1-8及实施例详细描述本发明的技术方案。
[0114]
如图1所示,一种针对雷达系统的多干扰机协同压制资源调度方法,包括以下步骤:
[0115]
s1、构建系统模型
[0116]
初始化系统参数:包括各相控阵雷达的位置、突防目标和干扰机在各时刻的位置及坐标、干扰机每帧最多产生的波束个数、各时刻干扰波束的指向、干扰机发射功率的上下限、总的干扰功率。构建多目标编队突防多站雷达系统的场景图;
[0117]
s2、获取信干噪比及检测概率:
[0118]
根据步骤s1中构建的系统模型,获取雷达接收端与资源优化变量相关的信干噪比,并计算出雷达节点对各目标的检测概率。
[0119]
s3、收集数据并更新状态
[0120]
雷达在压制性干扰环境中以步骤s2获取的检测概率探测目标,收集目标的量测值,并更新目标的状态。然后基于获得的目标状态,预测跟踪性能指标。
[0121]
s4、建立代价函数,
[0122]
结合压制性干扰环境下雷达系统对每个目标的跟踪性能,采用基于信息衰减因子的pcrlb作为每个目标的代价函数。
[0123]
s5、构建优化模型:
[0124]
将所有目标的代价函数求和作为优化问题的目标函数,并结合波束指向和发射功率的约束条件及步骤s1中确定的系统配置,构建基于波束指向和发射功率的多干扰机资源优化模型。
[0125]
s6、加入泛化误差,形成稳健模型:
[0126]
将雷达距离和角度的不确定性所导致的泛化误差与步骤s5构建的基于波束指向和发射功率的多干扰机资源优化模型相结合,形成稳健资源优化模型。
[0127]
s7、求解模型:
[0128]
采用粒子群算法分两步对稳健模型进行求解,得到基于波束指向和发射功率的多干扰机稳健资源调度策略。
[0129]
下面根据一个matlab仿真实例对本发明的方案作进一步验证。
[0130]
本实施例选用雷达系统的组成雷达节点为m=5个,每个雷达均能产生功率相同的多个波束进行多目标跟踪。在该场景下,g=2架配备干扰设备的飞机、一台干扰机和一台飞机组成一个协同干扰系统压制雷达系统,以完成目标突防任务。每台干扰机能够产生的波束数量最多为l=2个,干扰每个雷达的干扰机数量最多为q=3个。每个干扰机及目标的初始状态如表1所示。
[0131]
表1
[0132][0133]
本实施例选用多干扰机系统的总功率e
sum
为106w,其中每个干扰机的发射功率上限和下限分别为e
max
=0.9e
sum
和e
min
=0.1e
sum
。连续间隔之间的时间段为
△
t=1s,并使用30帧的序列。粒子群算法的粒子数设为100,学习因子为2,总迭代次数为30,β=0.9-0.5*(i/50)为第i次迭代的惯性权重。
[0134]
图3为本发明具体实施方式采用多干扰机协同压制多站雷达系统的场景图。图4-6为本发明具体实施方式得到的三个干扰机波束指向和发射功率的资源分配结果图。图7为本发明具体实施方式与均匀分配算法、传统优化算法所得三个目标的pcrlb对比图。图8为本发明具体实施方式与均匀分配算法、传统优化算法所得三个目标的检测概率对比图。
[0135]
通过本发明具体实施方式可以看出,本发明的方法能实时考虑当前态势,调整干扰机波束指向和发射功率的资源分配。并且考虑了雷达参数波动引起的泛化误差,将雷达距离和角度的不确定性与资源优化模型相结合,形成稳健优化资源调度模型,有效地压制了多站雷达系统,降低雷达系统对多目标的跟踪性能。解决现有方法未考虑雷达参数不确定性导致的泛化误差会影响干扰资源分配结果的问题,可以应用于电子对抗,目标突防等雷达领域。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。