技术特征:
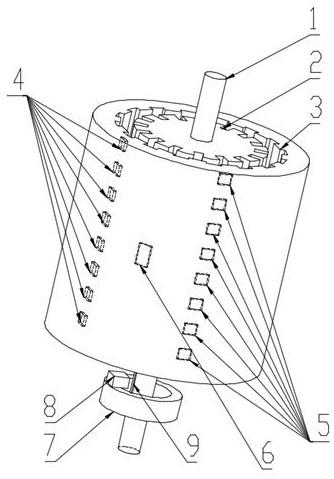
1.一种水轮发电机多功能动静气隙测量及计算方法,其特征在于,包括以下步骤:步骤1:安装测量单元:在发电机定子内缘上布置薄片式电涡流传感器;在发电机定子内缘中部布置温度传感器,在发电机导轴承上安装激光转速传感器,并在对应发电机轴上贴一个反光条;步骤2:通过检修测量模块在水轮发电机检修时,读取电涡流传感器后置的单片机中的实时数据,并根据数据计算气隙值;步骤3:准静态测量模块在水轮发电机启动过程中,利用激光转速传感器测量转速,电涡流传感器实时测量气隙;步骤4:热平衡动态测量模块利用触发热平衡测量数据采集功能键激活数据采集装置,并根据温度传感器所测得的温度值变化率小于0.1℃/h时,从电涡流传感器后置的单片机实时读取数据;步骤5:故障测量模块在气隙监测出现工况后,实时观测故障发展及机组停机过程中气隙变化情况。2.根据权利要求1所述的水轮发电机多功能动静气隙测量及计算方法,其特征在于,检修测量模块用于水轮发电机检修,利用机械装置或人力推动发电机转子运行,在每个磁极外圆中心线达到电涡流传感器时停下,通过触发检修测量数据采集功能键,激活数据采集装置读取电涡流传感器后置的单片机中的实时数据。3.根据权利要求1所述的水轮发电机多功能动静气隙测量及计算方法,其特征在于,所述检修测量模块在薄片式电涡流传感器安装之前应用垂直测量装置检测待安装部位的垂直度和同心度;薄片式电涡流传感器应分别布置在发电机 x、 y方向,且在每个方向上从上到下布置八个。4.根据权利要求3所述的水轮发电机多功能动静气隙测量及计算方法,其特征在于,检修测量模块工作时,气隙测量计算方法如下:设r
ijx
代表 x方向安装的第i个传感器所测量的第j个转子磁极气隙值,r
ijy
代表 y方向安装的第i个传感器所测量的第j个转子磁极气隙值;磁极气隙倾斜度可依据下式判断:上式中,当第j个磁极在 x方向所测的8个气隙值与该8个气隙的平均值相差小于0.5mm,则认为磁极从上到下是均匀的;若不符合上式要求,则利用 y方向数据进行校核,仍不符合要求,则认为第j个磁极安装偏差过大;在磁极气隙倾斜度符合要求后,开展磁极均匀性分布分析:假定由n个磁极,则全部磁极在 x、 y方向的偏心情况,可按照下式计算:
上式中,e
x
代表磁极在 x方向的偏心距,e
y
代表磁极在 y方向的偏心距,r
j
代表激光传感器在第j个磁极上气隙测量的均值,感器在第j个磁极上气隙测量的均值,代表第j个磁极与 x方向上的夹角关系,磁极总偏心距计算如下:则安装符合要求的磁极可按照下式进行判断:上式中r代表n个磁极的平均气隙,如果不符合上式,在利用 y方向传感器(5)所测数据进行校核,如果也不符合上式,则认为第j个磁极安装不符合要求,按照数值r
j-r进行调整;整个数据符合要求后记录相应平均气隙r和各个磁极对应气隙r
j
。5.根据权利要求4所述的水轮发电机多功能动静气隙测量及计算方法,其特征在于,准静态测量模块在机组启动时,通过触发准静态数据采集装置功能键启动数据采集装置,并实时读取激光转速传感器、薄片式电涡流传感器后置单片机的数据;当激光转速传感器实测数据达到额定转速的95%时,准静态测量模块截取对应时间下的激光转速传感器、电涡流传感器数据进行分析;激光转速传感器利用记录两次反光条之间的时间来换算转速,其数据保存为每次感应到反光条的时间及对应换算转速。6.根据权利要求1所述的水轮发电机多功能动静气隙测量及计算方法,其特征在于,电涡流传感器所测量的数据利用上升沿和下降沿双重规律判断所测量数据是磁极气隙数据,还是磁极间隙数据;以 x方向数据为例,在两次激光转速传感器记录时间内,读取电涡流传感器所测量的数据,其中数据下降沿判定规律:r
izxm
<r
z
;数据上升沿判定规律:r
izxm
>r
z
;其中,r
izxm
表示 x方向,第i个传感器所测得的第m时刻下的数据,r
z
代表在该时间段内所有数据的平均值;在数据下降沿和上升沿之间所采集的p个数据为磁极气隙数据,则截取p/2-2(取整)至p/2 2(取整)共5个数据进行平均计算;m个数据中按照该规律应有n个下降沿和上升沿数据,正好与实际磁极号一一对应,结果记为r
pj
;若存在缺失,可读取数据结尾下降沿之后的数据进行平均,认为是最后一个磁极对应的气隙值;准静态测量中,气隙变化符合下式规律,则认为其处于正常状态;0.95r
j
≤r
pj
≤1.05r
j
;若不符合上式,则利用 y方向电涡流传感器数据进行校核计算,若仍不符合,则认为对应的第j个磁极安装松动,应发出报警信号,并立即停机处理;并将最后一圈数据r
pj
进行记
录。7.根据权利要求6所述的水轮发电机多功能动静气隙测量及计算方法,其特征在于,热平衡动态测量模块在机组启动后,触发热平衡数据采集功能键激活数据采集装置,实时采集温度传感器的数据,当温度传感器所测得的温度值变化率小于0.1℃/h时,从电涡流传感器后置的单片机实时读取数据,利用信号下降沿、上升沿相匹配的方法进行气隙值与磁极号一一对应,记为r
dj
,第i个电涡流传感器所测平均数据记为r
dij
;在发电机转子和发电机定子出现热胀现象时,磁极气隙的变化,从以下3方面进行判断:电涡流传感器安装部位热变形超标:0.98r
dj
≤r
dij
≤1.05r
dj
;上式中,定子热变形分别计算 x、 y方向,只要任意方向不符合要求,发出报警信号;转子热变形判断:0.98r
pj
≤r
dj
≤1.05r
pj
;上式中,如果 x方面数据不符合要求,若 y方向定子热变形符合要求,则用 y方向数据进行校核;否则应发出报警信号;定子热变形判断:|r
djt-r
djt-1
|<0.1r
pj
;上式中,r
djt
及r
djt-1
分别代表当前和上一圈磁极气隙值,若两者之间数值差异不符合上式,且 y方向数据复核后也不符合上式,则说明转子气隙主要有定子某部位热膨胀加大,导致电磁拉力不平衡,进而引起气隙变化不均匀。8.根据权利要求1-7任一所述的水轮发电机多功能动静气隙测量及计算方法,其特征在于,故障测量模块是在当准静态测量模块、热平衡动态测量模块出现故障后,自动切换进入故障测量模块,并分析机组停机过程中气隙变化情况,以确定准确的故障位置和原因;故障测量模块利用信号下降沿、上升沿相匹配的方法进行气隙值与磁极号一一对应,并将最后一圈数据记为r
gj
,即停机前的数据;0.95r
pj
≤r
gj
≤1.05r
pj
;则可认为主要是由于安装松动引起,若不符合,则认为是由于磁极匝间短路引起局部温度提升。
技术总结
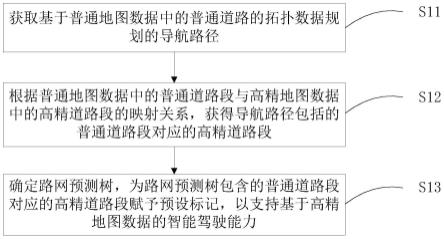
本发明公开了一种水轮发电机多功能动静气隙测量及计算方法,涉及水利水电技术领域,该方法包括以下步骤:通过检修测量模块在水轮发电机检修时,读取电涡流传感器后置的单片机中的实时数据,并计算气隙值;准静态测量模块在水轮发电机启动过程中,利用激光转速传感器测量转速,电涡流传感器实时测量气隙;热平衡动态测量模块利用触发热平衡测量数据采集功能键激活数据采集装置,并根据温度传感器所测得的温度值变化率小于0.1℃/h时,从电涡流传感器后置的单片机实时读取数据;故障测量模块在气隙监测出现工况后,实时观测故障发展及机组停机过程中气隙变化情况。该方法测量操作简单,数据分析准确,提高了水轮发电机在线监测与故障诊断水平。与故障诊断水平。与故障诊断水平。
技术研发人员:王安林 王家祥 林滨 邱文丰 郑盛锋 卢旺城 傅光进 郭道芬 黄睿琳
受保护的技术使用者:福建棉花滩水电开发有限公司
技术研发日:2022.07.22
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。