1.本技术涉及一种储物柜及配送设备组件。
背景技术:
2.当前外卖派送员需求缺口巨大,随着自动驾驶技术成熟,各地政策逐步放开,外卖送货机器人应运而生。外卖送货机器人主要瞄准写字楼、办公园区、学校等无法上门的场景,实现将外卖从外卖集散地送到楼下。目前的配送机器人都是行驶至用户跟前,用户从配送机器人内把配送物取走。当用户不在时,便无法配送,使用不便利。
技术实现要素:
3.本技术提供一种储物柜及配送设备组件,可实现货品自动入柜。
4.本技术实施方式提供一种储物柜,用于存储设有提手部的待配送物,所述储物柜包括主体、设置于所述主体的转动装置、设置于所述转动装置的多个支撑杆以及位于所述主体的前方的外挡板,所述支撑杆穿入所述提手部以挂起待配送物,所述外挡板设有多个门板,所述转动装置带动所述支撑杆移动至设定的门板后方,所述门板打开后,可取出支撑杆上的待配送物。
5.进一步地,所述转动装置包括链条与多个齿轮,所述支撑杆设置于所述链条,所述储物柜还包括电机,所述电机驱动齿轮转动,所述齿轮带动链条转动。
6.进一步地,所述转动装置围成环形,多个所述支撑杆沿所述转动装置的周向方向排布。
7.进一步地,所述外挡板设有缺口部,以供支撑杆外露,以挂起待配送物。
8.本技术实施方式还提供一种配送设备组件,包括配送机器人以及上述的储物柜,所述配送机器人用于装载待配送物,所述缺口部用于供配送机器人的一部分穿过,使得所述支撑杆穿入所述提手部。
9.进一步地,所述配送机器人包括车体以及设置于车体的轮子与门,所述车体设有收容空间,以放置待配送物,所述门用于关闭所述收容空间。
10.进一步地,所述配送机器人包括一对支撑臂,以撑开所述提手部。
11.进一步地,所述支撑臂转动设置,当支撑臂上的待配送物被支撑杆取走后,所述支撑臂向远离彼此的方向转动。
12.进一步地,所述支撑臂上设置有固定件,所述提手部挂持在所述固定件上,所述固定件可相对支撑臂转动。
13.进一步地,所述配送设备组件包括外包装袋,待配送物放置于所述外包装袋内,所述提手部为扎带,所述扎带固定至所述外包装袋。
14.本技术实施方式的储物柜设有转动装置以及设置于所述转动装置的多个支撑杆,支撑杆穿入待配送物的提手部,即可提起待配送物,转动装置带动支撑杆移动至设定的门板后方,实现待配送物的自动入柜,无需人工操作,节省人力成本。
附图说明
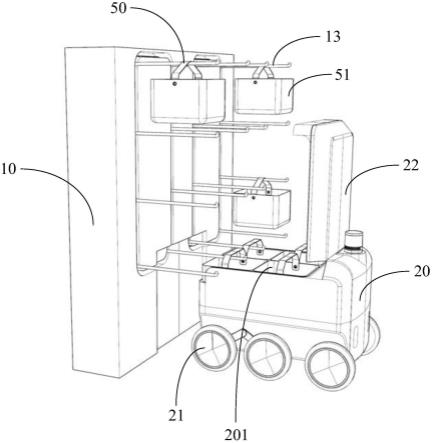
15.图1示出了本技术示例性实施方式的配送设备组件的示意图,其中,配送机器人与储物柜未对接;
16.图2与图1相似,其中,配送机器人与储物柜对接完成;
17.图3示出了图1所示的储物柜的示意图,其中,未示出外挡板;
18.图4与图2相似,其中,未示出外挡板;
19.图5示出了待配送物的一个实施方式的示意图;
20.图6与图5相似,其中,待配送物脱离配送机器人;
21.图7示出了待配送物的另一个实施方式的示意图。
具体实施方式
22.这里将详细地对示例性实施方式进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施方式中所描述的实施方式并不代表与本说明书相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本说明书的一些方面相一致的装置和方法的例子。
23.在本说明书使用的术语是仅仅出于描述特定实施方式的目的,而非旨在限制本说明书。在本说明书和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
24.应当理解,尽管在本说明书可能采用术语第一、第二、第三等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本说明书范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。取决于语境,如在此所使用的词语“如果”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”。
25.参见图1至图3所示,本技术实施方式的配送设备组件包括储物柜1与配送机器人2。储物柜1可放置于写字楼、办公园区、学校等的楼下。配送机器人2把待配送物5从待配送物5集散地送到储物柜1内,实现待配送物5入柜,用户开柜自取待配送物5,实现待配送物5的无人配送,且取件时间更加的人性化。待配送物5可以是外卖,也可以是快递。
26.所述储物柜1包括主体10、设置于所述主体10的转动装置11、设置于所述转动装置11的多个支撑杆13以及位于所述主体10的前方的外挡板12。所述外挡板12与所述主体10围成容纳空间101,所述转动装置11位于所述容纳空间101内。所述外挡板12设置有多个门板120。所述门板120可供打开,用户从支撑杆13上取下待配送物5。一个门板120对应一个待配送物5,可防止错拿以及节省用户寻找的时间,提升用户使用体验。
27.所述外挡板12设有缺口部121,使得支撑杆13外露,以及可供配送机器人2的一部分进入所述容纳空间101内。在配送机器人2配送前,空出的支撑杆13会转动至所述缺口部121处,为下一次配送做准备。
28.所述转动装置11围成环形。多个所述支撑杆13沿所述转动装置11的周向方向均匀分布。所述支撑杆13的数量与所述门板120的数量对应,使得支撑杆13可运行至对应的门板120的后方,以把待配送物5运送至对应的门板120后方。多个所述门板120沿竖向方向成列
设置。所述支撑杆13可向上移动,也可向下移动,以移动至设定的门板120后方。
29.在一个实施方式中,所述转动装置11可由电机驱动。参见图3所示,在一个实施方式中,所述转动装置11包括链条与多个齿轮,电机驱动齿轮转动,齿轮带动链条转动。所述转动装置11也可为其他结构,能带动支撑杆13移动即可。
30.参见图4所示,所述配送机器人2包括车体20以及设置于车体20的轮子21与门22。所述车体20设有收容空间201,以放置待配送物5。所述门22用于关闭所述收容空间201。待配送物5包括提手部50。
31.当配送机器人2装载了待配送物5后,门22关闭,以防止待配送物5掉落。当配送机器人到达匹配的储物柜1处时,配送机器人2的门22打开,支撑杆13穿入提手部50,使得待配送物5挂持在支撑杆13上,配送机器人2退出,转动装置11带动支撑杆13移动,使得待配送物5移动至设定的门板120后方,实现待配送物5的自动入柜,无需人工操作,节省人力成本。用户通过扫码或扫脸或录入取件码等方式可打开对应的门板120,以取走待配送物5。
32.所述提手部50设置于待配送物5的外包装袋51上。外包装袋51可以是纸盒,也可是pp袋。所述提手部50具有一定的硬度,使其可以立起,便于支撑杆13准确穿入,以提起待配送物5。
33.所述提手部50可由柔性材料制成,以便于提手部50受力变形,支撑杆13滑至提手部50的中间位置,防止待配送物5倾斜以及确保待配送物5挂持的稳定性。
34.参见图5至图6所示,在一个实施方式中,所述配送机器人2包括一对支撑臂23,以撑开所述提手部50,以便于支撑杆13可进入提手部50围成的空间,以提起待配送物5。所述支撑臂23可转动。当支撑臂23上的待配送物5被支撑杆13取走后,所述支撑臂23向远离彼此的方向转动,以防止前方的支撑臂23挡住后方的待配送物5。
35.所述支撑臂23上设置有固定件24。所述提手部50挂持在所述固定件24上。所述固定件24可相对支撑臂23转动。所述固定件24受到待配送物5的压力作用,处于水平状态,当待配送物5被提起时,固定件24向竖直状态转动,以便于提手部50脱离固定件24。
36.所述提手部50可以是扎带,捆绑在待配送物5的外包装袋51上,比如,普通的塑料袋比较软,可以在塑料袋上捆绑一扎带,便于支撑杆13准确穿入。扎带成本较低,节省了成本。
37.参见图7所示,也可在外包装袋51内放置硬纸板6,以撑开外包装袋51,便于支撑杆13准确穿入。
38.本领域技术人员在考虑说明书及实践这里公开的发明创造后,将容易想到本说明书的其它实施方案。本说明书旨在涵盖本说明书的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本说明书的一般性原理并包括本说明书未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施方式仅被视为示例性的,本说明书的真正范围和精神由下面的权利要求指出。
39.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
40.以上所述仅为本说明书的较佳实施方式而已,并不用以限制本说明书,凡在本说明书的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本说明书保护的范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
