1.本实用新型涉及家用机器人技术领域,具体为一种家庭用扫地机器人行走结构。
背景技术:
2.家庭用扫地机器人是一种用于对地面进行扫地的智能家具电器,其主要优点是解放人们双手,操作简单,体积小,便于携带,且普遍存在于各种各样的家庭扫地中,具有较好的使用效果,在使用时相对于一般的家庭用扫地机器人更加适合。
3.但是现有的扫地机器人存在以下不足:由于如今的住宅内的阳台,厨房,卫生间会采用拖拉门来进行隔断,这些拖拉门需要在地面加装导轨,而扫地机器人为了满足对沙发和床下进行清扫,需要做的非常的低矮,从而使得扫地机器人无法跨越拖拉门的导轨,导致人们需要在完成一个房间的清扫任务后还需要将扫地机器人移动至拖拉门的另一侧,相当麻烦,扫地机器人的轮毂容易吸附灰尘,造成地面清扫不干净。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种家庭用扫地机器人行走结构,解决了上述提到的扫地机器人无法跨越门槛进行清扫和轮毂吸附灰尘的问题。
6.(二)技术方案
7.本实用新型为了实现上述目的具体采用以下技术方案:
8.一种家庭用扫地机器人行走结构,包括主体、导向轮、行走组件和轮毂刷,所述主体的底部设置有扫地组件,且主体的底部转动连接有导向轮,所述主体的底部对称设置有行走组件,且行走组件两端的主体上设置有轮毂刷。
9.进一步地,所述主体的顶部呈线性设置有红外感应摄像头、控制键、提拉把手和光线传感器,且主体的侧边分别设置有垃圾仓、启动开关和充电口。
10.进一步地,所述扫地组件分别由吸尘口、散热孔和拖地抹布组成,所述吸尘口设置有主体的底部中心位置处,且吸尘口一侧主体的底部设置有散热孔,并且吸尘口另一侧主体的底部设置有拖地抹布。
11.进一步地,所述行走组件由固定座、第一气动杆、第二气动杆、第一转动轮、第二转动轮、动力电机、旋转齿轮和履带组成,所述固定座的两端分别固定连接有第一气动杆和第二气动杆,且第一气动杆和第二气动杆的气动轴端分别转动连接有第一转动轮和第二转动轮,所述固定座上固定连接有动力电机,且动力电机的输出轴一端固定连接有旋转齿轮,所述第一转动轮、第二转动轮和旋转齿轮上转动设置有履带,且旋转齿轮啮合履带内侧的齿口。
12.进一步地,所述轮毂刷由转动辊、轴承和毛刷组成,所述转动辊的两端设置有轴承,且轴承转动连接在主体上,所述转动辊上呈s型包覆设置有毛刷,且毛刷转动抵触在履带上。
13.(三)有益效果
14.与现有技术相比,本实用新型提供了一种家庭用扫地机器人行走结构,具备以下有益效果:
15.本实用新型,通过设置主体、扫地组件、导向轮、行走组件、第一气动杆、第二气动杆、第一转动轮、第二转动轮、动力电机、履带和轮毂刷,在扫地机器人跨越不过门槛到下一个房间打扫时,会通过两个气动杆升起,将转动轮顶出,使履带弓起,将扫地机器人离地距离增大,通过履带转动,便可以翻阅门槛,轮毂刷的设计能够清扫履带上吸附的灰尘,确保打扫干净,整体设计结构合理,使扫地机器人能够跨越较高的门槛或地毯,进行全屋打扫。
附图说明
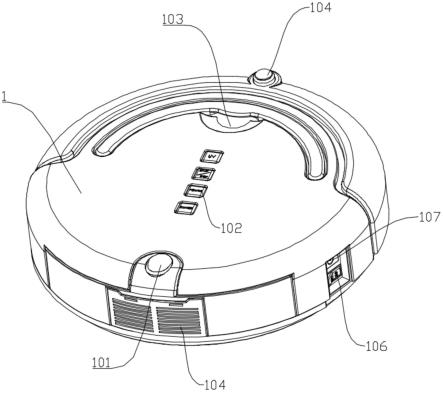
16.图1为本实用新型整体结构示意图;
17.图2为本实用新型整体底部结构示意图;
18.图3为本实用新型行走组件结构示意图;
19.图4为本实用新型行走组件抬升结构示意图;
20.图5为本实用新型轮毂刷结构示意图。
21.图中:1、主体;101、红外感应摄像头;102、控制键;103、提拉把手;104、光线传感器;105、垃圾仓;106、启动开关;107、充电口;2、扫地组件;201、吸尘口;202、散热孔;203、拖地抹布;3、导向轮;4、行走组件;401、固定座;402、第一气动杆;403、第二气动杆;404、第一转动轮;405、第二转动轮;406、动力电机;407、旋转齿轮;408、履带;5、轮毂刷;501、转动辊;502、轴承;503、毛刷。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.实施例
24.如图1-5所示,本实用新型一个实施例提出的一种家庭用扫地机器人行走结构,包括主体1、导向轮3、行走组件4和轮毂刷5,主体1的底部设置有扫地组件2,主体1的底部转动连接有导向轮3,主体1的底部对称设置有行走组件4,行走组件4两端的主体1上设置有轮毂刷5。
25.综上所述,此方案设计,优化了扫地机器人的越障能力,通过设置行走组件4,解决了因设置有推拉门门槛导致扫地机器人跨越不了,没法对全屋进行打扫的问题,在扫地机器人需要跨越推拉门门槛或者高度比较高的地毯时,第一气动杆402和第二气动杆403的气动轴会顶出,因第一气动杆402和第二气动杆403在固定座401上呈四十五度角设置,故会将第一转动轮404和第二转动轮405斜向下顶起,因第一转动轮404、第二转动轮405和旋转齿轮407上转动设置有履带408,所以在第一转动轮404和第二转动轮405斜向下顶起时,履带408会弓起,从而将扫地机器人的整体高度提高,行走组件4能够正常行走,因履带408的设计,故扫地机器人能够攀越门槛或高一点的地毯,在通过后第一气动杆402和第二气动杆
403会收回复位,扫地机器人降低到原始高度,便可以继续工作,底部导向轮3的设置能够掌控整体的行进方向,行走组件4两端抵触转动有轮毂刷5,在履带408转动时带动轮毂刷5转动,从而能够清扫履带408上吸附的灰尘,不会因为履带408上带有灰尘,导致地面一直清扫不干净,整体设计结构合理,解决了扫地机器人越障的短板问题,提高全屋清扫能力。
26.如图1所示,在一些实施例中,主体1的顶部呈线性设置有红外感应摄像头101、控制键102、提拉把手103和光线传感器104,主体1的侧边分别设置有垃圾仓105、启动开关106和充电口107,整体设计用于扫地机器人在室内能够自动巡航清扫,确保主动避开障碍物。
27.如图2所示,在一些实施例中,扫地组件2分别由吸尘口201、散热孔202和拖地抹布203组成,吸尘口201设置有主体1的底部中心位置处,吸尘口201一侧主体1的底部设置有散热孔202,吸尘口201另一侧主体1的底部设置有拖地抹布203,采用了扫、吸和拖三合一的方式,整体设计使扫地机器人能够将地面打扫的更加干净,提高工作效率。
28.如图2、图3和图4所示,在一些实施例中,行走组件4由固定座401、第一气动杆402、第二气动杆403、第一转动轮404、第二转动轮405、动力电机406、旋转齿轮407和履带408组成,固定座401的两端分别固定连接有第一气动杆402和第二气动杆403,第一气动杆402和第二气动杆403的气动轴端分别转动连接有第一转动轮404和第二转动轮405,固定座401上固定连接有动力电机406,动力电机406的输出轴一端固定连接有旋转齿轮407,第一转动轮404、第二转动轮405和旋转齿轮407上转动设置有履带408,旋转齿轮407啮合履带408内侧的齿口,旋转齿轮407转动带动履带408在第一转动轮404、第二转动轮405和旋转齿轮407上转动,第一气动杆402和第二气动杆403倾斜四十五度角设计,在气动轴伸出时,顶动第一转动轮404和第二转动轮405运动,将履带408弓起,提高扫地机器人整体离地高度,确保能够跨越室内设置的推拉门的门槛。
29.如图5所示,在一些实施例中,轮毂刷5由转动辊501、轴承502和毛刷503组成,转动辊501的两端设置有轴承502,轴承502转动连接在主体1上,转动辊501上呈s型包覆设置有毛刷503,毛刷503转动抵触在履带408上,轮毂刷5贴合抵触履带408设置,在履带408转动时,带动轮毂刷5转动,能够将履带408上吸附的灰尘清扫下,通过吸尘口201将灰尘吸入,不会因为轮毂上带有灰尘,导致地面始终清扫不干净,此设计确保地面清扫干净。
30.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
