1.本实用新型属于自动化技术领域,具体涉及一种工件沟槽自动测量设备。
背景技术:
2.工件在生产加工完毕后需要对尺寸进行测量,检验加工是否符合标准。现有工件沟槽槽宽、槽深一般是使用用千分尺做得专业量具测量,这种检测方法效率低,检测强度大,并且不能对沟槽尺寸精度进行实时控制。为了提高工件检测效率,降低手动检测强度,实现检测精度实时控制,需设计一种工件沟槽自动测量的设备。
技术实现要素:
3.本实用新型提供一种工件沟槽自动测量设备,可根据厂房现有条件布局设计,最大限度利用设施和场地,满足工件自动测量的要求,总体设计方案及性能指标均符合相关国家标准及部颁标准,设备结构合理,性能安全可靠,操作方便。
4.为实现上述目的,本实用新型采用以下技术方案实现:
5.一种工件沟槽自动测量设备,包括机架、安装在机架底板上的回转机构、移动机构、测量机构、纠偏机构、安装在机架一侧的电器控制机构;
6.所述回转机构上安装有真空吸盘机构,用于吸附并带动待测工件转动;
7.所述移动机构安装在回转机构外侧,移动机构上安装有测量机构和纠偏机构,移动机构用于带动测量机构和纠偏机构移动;
8.所述测量机构和纠偏机构位于回转机构上方,用于对工件表面沟槽进行测量。
9.作为上述方案的优选,所述回转机构包括中空旋转平台、旋转盘、驱动电机,中空旋转平台的外壳固定在机架底板上,输入端连接驱动电机,转动端固定连接旋转盘,中空旋转平台的中心通孔内设有旋转接头。
10.作为上述方案的优选,所述真空吸盘机构包括铝盘、真空吸盘、真空泵,所述铝盘安装在旋转盘上,旋转盘内位于铝盘下方设有真空吸盘,真空吸盘与真空泵连接。
11.作为上述方案的优选,所述移动机构采用双驱龙门直线电机平台,整体呈“匚”字形,能够带动测量机构和纠偏机构沿x轴和y轴移动。
12.作为上述方案的优选,所述测量机构包括3d测量传感器,用于测量槽宽槽深,所述3d测量传感器采用激光3d轮廓测量仪。
13.作为上述方案的优选,所述纠偏机构包括相机,用于测量沟槽方向,以确保3d测量传感器的光束与沟槽方向垂直。
14.作为上述方案的优选,所述机架包括上机架、下机架,上机架底部设有大理石底板,回转机构安装在大理石底板中央,下机架上安装有真空回路,真空回路与真空泵相连接。
15.作为上述方案的优选,所述电器控制机构包括操作柜,操作柜内设有工控机,回转机构的驱动电机、真空吸盘机构的真空泵、移动机构的龙门直线电机、以及纠偏机构的相
机、测量机构的3d测量传感器均与工控机连接,操作柜上设有触摸屏。
16.由于具有上述结构,本实用新型的有益效果在于:
17.本技术通过控制柜控制整个设备的自动运行,通过双驱龙门直线电机平台驱动测量机及纠偏机构构快速定位到指定位置,通过2d相机进行纠偏,以确保3d测量传感器的光束与沟槽方向垂直,并通过3d测量传感器对工件表面沟槽槽宽槽深实施测量,测量精度高,测量速度快,有效提高工件检测效率和检测精度。而且可根据厂房现有条件布局设计,能够最大限度利用设施和场地,满足工件自动测量的要求,总体设计方案及性能指标均符合相关国家标准及部颁标准,设备结构合理,性能安全可靠,操作方便。
附图说明
18.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。
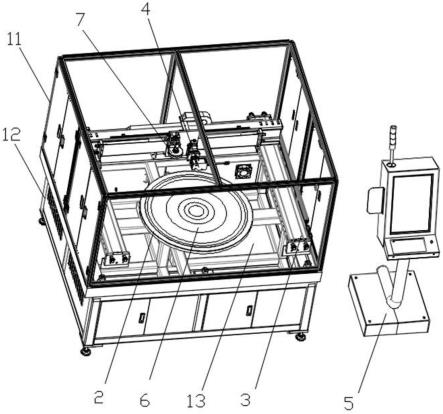
19.图1为本实用新型的整体结构示意图;
20.图2、图3为本实用新型回转机构的结构示意图;
21.图4为本实用新型移动机构的结构示意图。
具体实施方式
22.下面将结合本实用新型的附图,对本实用新型的技术方案进行清楚、完整地描述。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.如图1至图4所示,本实施例提供一种工件沟槽自动测量设备,包括机架、安装在机架底板13上的回转机构2、移动机构3、测量机构4、纠偏机构7、安装在机架一侧的电器控制机构5;
24.所述回转机构2上安装有真空吸盘机构6,用于吸附并带动待测工件转动;
25.所述移动机构3安装在回转机构2外侧,移动机构3上安装有测量机构4和纠偏机构7,移动机构3用于带动测量机构4和纠偏机构7移动;
26.所述测量机构4和纠偏机构7位于回转机构2上方,用于对工件表面沟槽进行测量。
27.在本实施例中,所述回转机构2包括中空旋转平台21、旋转盘22、驱动电机23,中空旋转平台21的外壳固定在机架底板13上,输入端连接驱动电机23,转动端固定连接旋转盘22,中空旋转平台21的中心通孔内设有旋转接头。
28.在本实施例中,所述真空吸盘机构6包括铝盘、真空吸盘、真空泵,所述铝盘安装在旋转盘22上,旋转盘22内位于铝盘下方设有真空吸盘,真空吸盘与真空泵连接。铝盘采用分区设计,适宜不同尺寸工件要求。
29.在本实施例中,所述移动机构3采用双驱龙门直线电机平台,整体呈“匚”字形,能够带动测量机构4和纠偏机构7沿x轴和y轴移动。双驱龙门直线电机平台采用大族两轴双驱模组,负载能力强,重复定位精度高,运行稳定可靠。
30.在本实施例中,所述测量机构4包括3d测量传感器,用于测量槽宽槽深。所述3d测量传感器采用激光3d轮廓测量仪(深视3d轮廓测量仪)。
31.在本实施例中,所述纠偏机构7包括相机,用于测量沟槽方向,以确保3d测量传感
器的光束与沟槽方向垂直。
32.在本实施例中,所述机架包括上机架11、下机架12,上机架11底部设有大理石底板13(采用大理石材料精度高,重量轻,不易变形),回转机构2安装在大理石底板13中央,下机架12上安装有真空回路,真空回路与真空泵相连接。
33.在本实施例中,所述电器控制机构5包括操作柜,操作柜内设有工控机,回转机构2的驱动电机23、真空吸盘机构6的真空泵、移动机构3的龙门直线电机、以及纠偏机构7的相机、测量机构4的3d测量传感器均与工控机连接,操作柜上设有触摸屏。
34.上述结构的工作原理:
35.人工在铝盘上放置固定模板,打开真空泵,放置工件,待真空吸盘吸附好工件后,通过操作柜上的触摸屏进行人机交互操作,设备开始测量,测量时,2d相机先测量沟槽方向,方向信号测量成功后传输给工控机,工控机控制驱动电机23,驱动中空旋转平台21的转动端转动,使得旋转盘22根据沟槽测量的角度校正,使3d测量传感器光束与沟槽方向垂直(激光线与y轴平行,测量向x轴方向测量),校准成功后,3d测量传感器开始测量沟槽数据,测量过程中,通过双驱龙门直线电机平台移动相机和3d测量传感器的位置,并最终以九点测量法完成沟槽测量。
36.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
