1.本发明涉及清洗设备,尤其是涉及一种清洗机及其内腔压力智能平衡系统。
背景技术:
2.现有洗碗机一般都配置换气模块(如排气抽气组件、热风鼓风组件等)。通常来说,为了达到防水密封效果,洗净过程腔内是一个相对密闭的空间,不仅水流、水滴无法泄露,气压也会随之增大,加之腔内高温高湿的环境,部分水汽便会在机身缝隙或排气、呼吸口位置外溢。除了正常排气口外溢,进风处、呼吸器口处蒸汽外溢是非正常的,会导致腔外湿度增大,造成橱柜的潮湿(木制损坏、铰链锈蚀等),同时也会使得橱柜内部与机身之间的环境湿度偏大,对洗净结束后的干燥过程不利。现有技术中公开有各种洗碗机的通风控制方法,如专利号为201611077949.7(授权公告号为cn 106419796 b)的中国发明专利所公开的《洗碗机的通风控制方法、装置和洗碗机》,该控制方法在洗碗机上电后,实时检测洗碗机的餐具储藏箱内的环境湿度;判断餐具储藏箱内的当前环境湿度所处的湿度范围;根据餐具储藏箱内的当前环境湿度所处的湿度范围获取通风循环次数和通风节拍,并根据获取的通风循环次数和通风节拍对洗碗机的通风系统进行控制,以对餐具储藏箱内的湿气进行处理。上述通风控制方法能够根据参餐具储藏箱内的当前环境湿度,控制洗碗机的通风系统对餐具储藏箱内的湿气进行处理,从而解决了餐具放置时间较久易产生异味的问题,但是,对于如何有效防止因腔体蒸汽过量外溢而导致橱柜环境湿度增高、冷凝水聚集等问题,并没有给出解决方案。
技术实现要素:
3.本发明所要解决的第一个技术问题是针对上述现有技术现状,提供一种结构新颖、能实现内胆水温检测以及内胆湿度双通道检测的清洗机。
4.本发明所要解决的第二个技术问题是针对上述现有技术现状,提供一种能适应不同时序、不同温湿度环境进行判断且误判率低的内腔压力智能平衡系统。
5.本发明解决上述第一个技术问题所采用的技术方案为:该清洗机,包括有内胆和安装在内胆正面的门体,其特征在于:在所述门体上安装有排气组件,在所述内胆的侧壁上安装有热风组件和呼吸器组件,所述排气组件和呼吸器组件均包括有能检测内胆内部空气湿度的湿度传感器,所述内胆内部安装有能检测内胆水温的温度传感器。
6.优选地,所述呼吸器组件安装在内胆的左侧壁上,所述热风组件安装在内胆的右侧壁上。
7.排气组件可以有多种结构,优选地,所述排气组件具有排气外壳,所述排气外壳具有进气口和出气口,排气外壳内部具有连通进气口与出气口的排气通道,进气口与内胆内部相连通,出气口与内胆外部相连通,排气组件的湿度传感器安装在所述排气通道内。
8.呼吸器组件可以有多种结构,优选地,所述呼吸器组件具有壳体,所述壳体上开有进风口和呼吸口,壳体内部具有连通进风口与呼吸口的风道,所述进风口与内胆内部相连
通,呼吸口与内胆外部相连通,呼吸器组件的湿度传感器安装在所述风道内。
9.热风组件可以有多种结构,优选地,所述热风组件包括有外壳,所述外壳内部形成有连通内胆内、外部的热风通道,在所述热风通道内安装有加热元件和风扇。
10.进一步优选,所述风扇安装在热风通道的进风口处,沿着空气流动方向,所述加热元件设于风扇的下游,加热元件下游的热风通道分为第一热风支路和第二热风支路,在所述第一热风支路的出口和第二热风支路的出口均安装有出风接头,在所述出风接头内安装有能用来检测内胆内部空气湿度的湿度传感器。这样,在热风组件的出口处布置湿度传感器,避免了直接接触腔内水流冲击,降低了传感器泡水短路的风险,同时能较为直接地反映腔内空气湿度。
11.本发明解决上述第二个技术问题所采用的技术方案为:该清洗机的内腔压力智能平衡系统,其特征在于控制逻辑如下:
12.若系统判断为工况较为温和、洗净温度较低的时序时,系统默认不开启对腔内的干预动作;
13.若系统判断为日常洗或超快洗时序时,所述温度传感器对内胆水温进行检测,检测到水温到达设定温度,且排气组件的湿度传感器检测到湿度值达到设定值时,系统调用定时主动排气时序介入,引导腔内部分湿热空气通过排气组件排出内胆外部;
14.若系统判断为超净洗时序时,先通过排气组件的湿度传感器检测腔内湿度,然后用温度传感器检测腔内水温,在检测到湿度和温度均达到设定值时,调用定时主动排气时序序介入,并接着通过呼吸器组件的湿度传感器进行湿度检测,若检测到湿度值高于预设值,则调用辅助换气时序,热风组件进行动作,将热风导入内胆内。
15.进一步优选,该系统的控制流程包括如下步骤:
16.步骤1:系统判断输入端洗净时序类型,若时序为日常洗或超快洗,则执行步骤2;时序为超净洗,执行步骤3;其他时序执行步骤4;
17.步骤2:从内胆进水开始持续监测水温t,判断水温是否高于预设值t1,若是则执行步骤5;若否则继续监测至达到t1为止;
18.步骤3:从内胆进水开始,排气组件持续监测湿度值h,判断是否高于预设值h1,若是则执行步骤6;若否则继续监测至达到h1为止;
19.步骤4:维持原有时序进行洗净过程,系统不做出额外干预;
20.步骤5:开始监测排气组件内湿度值h,判断是否高于预设值h2,若是则介入特定的定时主动排气时序,并在维持此时序的同时进入步骤7;若否则返回步骤2;
21.步骤6:温度传感器开始监测内腔底部水温t,判断水温是否高于预设值t2,若是则介入特定的定时主动排气时序,并在维持此时序的同时进入步骤8;若否则返回步骤3;
22.步骤7:持续进行洗净过程,直至本道洗净结束、排水,进入到下一道洗净过程,下一道洗净开始后返回步骤2;
23.步骤8:在洗净过程中,呼吸器组件的湿度传感器开始监测湿度值h,并判断是否高于预设值h3,若是则进入步骤9;若否则进入步骤10;
24.步骤9:开启一次辅助换气时序,不论结束与否,等待至本道洗净结束、排水、进入下一道洗净时序,在下一道时序开始后返回步骤3;
25.步骤10:持续进行洗净过程,直至本道洗净结束、排水、进入到下一道洗净过程,下
一道洗净开始后返回步骤3。
26.为了使系统更加智能化,所述定时主动排气时序和辅助换气时序根据湿度值情况相应调整,当湿度值增速高于设定时,延长排气时序和换气时序的动作时长。这样,在不同的工况下,均能很好地实现腔内压力平衡。
27.进一步优选,同一道超净洗时序中,定时主动排气时序间隔启动,辅助换气时序仅开启一次。
28.与现有技术相比,本发明的优点在于:该清洗机在排气组件处、呼吸器组件处多点同步布置湿度传感器,能有效检测到湿度值增大带来的腔内蒸汽外溢现象,反馈灵敏且可靠性高,还能通过温度传感器对内胆水位进行检测,该内腔压力智能平衡系统同步设置了排气、换气动作时序,能应对不同程度的蒸汽外溢情况,能灵敏地对腔内气体外溢过程进行检测、跟踪,检测到腔内压力增大,能及时进行主动、定向地泄压动作,维持腔内压力的基本平衡,并且,能适应不同时序、不同温湿度环境进行判断,提高智能化程度,降低误判率。
附图说明
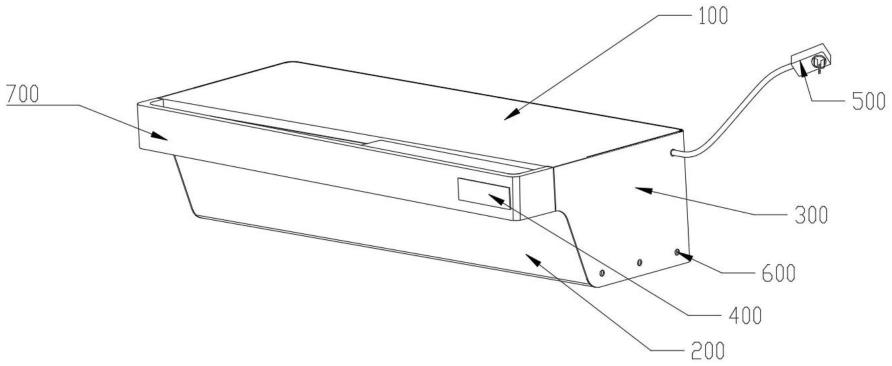
29.图1为本发明实施例清洗机的部分结构示意图;
30.图2为图1另一角度的结构示意图;
31.图3为本发明实施例的排气组件的结构示意图;
32.图4为本发明实施例的热风组件的结构示意图;
33.图5为图4所示热风组件的分解示意图;
34.图6为本发明实施例的清洗机的内腔压力智能平衡系统的控制流程图。
具体实施方式
35.以下结合附图实施例对本发明作进一步详细描述。
36.如图1至图3所示,本实施例的清洗机为洗碗机,包括有内胆1和安装在内胆正面的门体2,在门体2上安装有排气组件3,内胆1的右侧壁上安装有热风组件4,内胆1的左侧壁上安装有呼吸器组件5。
37.排气组件3具有排气外壳,排气外壳具有进气口和出气口,排气外壳内部具有连通进气口与出气口的排气通道,进气口与内胆1内部相连通,出气口与内胆1外部相连通,在现有排气组件的基础上,在排气通道内安装有湿度传感器6。排气组件3抽出内胆1内部气体,排气组件3的出气口为主要泄压口。
38.如图4和图5所示,热风组件4包括有外壳41,外壳41内部形成有连通内胆1外部与内胆1内部的热风通道,在热风通道内安装有加热元件42和风扇43,风扇43用于向内胆1内部鼓风,必要时开启加热元件42进行热风烘干。风扇43安装在热风通道的进风口处,沿着空气流动方向,加热元件42设于风扇43的下游,加热元件42下游的热风通道分为第一热风支路44和第二热风支路45,在第一热风支路44的出口和第二热风支路45的出口均安装有出风接头46,在出风接头46内安装有能用来检测内胆内部空气湿度的湿度传感器6。
39.工作时,在风扇43的工作下,外部空气被吸入热风通道内,经加热元件42加热后成为热风,被分流后分别进入第一热风支路44和第二热风支路45,然后往内胆1内部送风,实现干燥。在存储模式下,腔内空气直接接触出风接头46内部的湿度传感器6表面测湿探头,
可实现腔内湿度值的实时反馈,其值偏大时做出热风循环指令,对内胆1进行热风烘干。将湿度传感器6布置在出风接头46,避免了直接接触腔内水流冲击,降低了传感器泡水短路的风险,同时能较为直接地反映腔内空气湿度。
40.呼吸器组件5具有壳体,壳体上开有进风口和呼吸口,壳体内部具有连通进风口与呼吸口的风道,进风口与内胆1内部相连通,呼吸口与内胆1外部相连通,在现有呼吸器组件的基础上,在风道内安装有湿度传感器6。呼吸器组件5主要用于腔内外平衡气压。
41.排气组件3和呼吸器组件5的湿度传感器6均能用来检测内胆1腔内的空气湿度,内胆1腔内底部安装有温度传感器(图中未示),用来检测内胆1的进水温度。
42.如图6所示,该清洗机的内腔压力智能平衡系统对输入的洗净时序判断逻辑如下:
43.系统的输入端为不同的洗净时序(温度、时长、水泵转速等不同),系统根据时序进行一个初步的判定。当时序为安静洗、温和洗、晶柔洗、节能洗等工况较为温和、洗净温度较低的时序时,系统默认不启动对腔内的干预动作。当时序为日常洗、超快洗、超净洗等工况较为激烈的时序时,系统介入;
44.当系统判定为需要介入动作且不为超净洗时,首先实时对内胆水温进行检测,当水温到达设定值(如t1),(此时在室温或更低温度下已经有一定量蒸汽及水雾形成),此时排气组件处的湿度传感器检测湿度值并反馈信号,当湿度值达到设定水平(如h1),则判定湿热空气外溢,已经构成外溢出机器的风险,系统调用定时主动排气时序介入,引导部分湿热的空气通过排气组件3排出腔外,从而有效防止或减少了水汽从呼吸器、热风组件等非正常位置外溢的风险。
45.当系统判定为超净洗等工况最为激烈的时序时,在水温检测逻辑前后各设置一道湿度检测逻辑,分别设置在排气组件3和呼吸器组件5处(通常来说,排气组件会率先检测到高湿度的信号),当排气组件3处湿度探测点湿度和洗净水温都分别达到设定值(如h1、t2),则判定湿热空气外溢,已经构成外溢出机器的风险,定时主动排气时序介入,引导部分湿热的空气通过排气组件3排出腔外,从而有效防止或减少了水汽从呼吸器组件5、热风组件4等非正常位置外溢的风险。在此过程中保持对呼吸器组件5湿度探测点的实时监测,若呼吸器组件5仍能检测到高湿度值(如h2),则判定蒸汽仍存在通过呼吸器组件5外溢的风险,说明腔内蒸汽仍过量,单独的排气(抽气)动作难以满足防止蒸汽外溢的目标。此时辅助换气时序介入,热风组件进行动作,对腔内进行一次简单的换风,由于这个动作对腔内环境改变较大,因此仅在极限工况下单独动作一次,降低蒸汽外溢量;
46.定时主动排气时序的终点为排水动作时序(单道洗净时序结束后进入排水时序),此时系统会重新进水(水温一般为室温、冷水),此时整个判定回到最初水温的判定,重新开始判定及动作流程。该设定是为了节能,降低误判几率,因为第n、第n 1道(不同道)的洗净时序逻辑不同(包括水温及水泵转速等),腔内温度及洗净激烈程度各不相同,因此需要返回水温判定步骤重新开始。
47.上述控制流程具体包括如下步骤:
48.步骤1:系统判断输入端洗净时序类型,若时序为日常洗或超快洗,则执行步骤2;时序为超净洗,执行步骤3;其他时序执行步骤4;
49.步骤2:从内胆进水开始持续监测水温t,判断水温是否高于预设值t1,若是则执行步骤5;若否则继续监测至达到t1为止;
50.步骤3:从内胆进水开始,排气组件持续监测湿度值h,判断是否高于预设值h1,若是则执行步骤6;若否则继续监测至达到h1为止;
51.步骤4:维持原有时序进行洗净过程,系统不做出额外干预;
52.步骤5:开始监测排气组件内湿度值h,判断是否高于预设值h2,若是则介入特定的定时主动排气时序,并在维持此时序的同时进入步骤7;若否则返回步骤2;
53.步骤6:温度传感器开始监测内腔底部水温t,判断水温是否高于预设值t2,若是则介入特定的定时主动排气时序,并在维持此时序的同时进入步骤8;若否则返回步骤3;
54.步骤7:持续进行洗净过程,直至本道洗净结束、排水,进入到下一道洗净过程,下一道洗净开始后返回步骤2;
55.步骤8:在洗净过程中,呼吸器组件的湿度传感器开始监测湿度值h,并判断是否高于预设值h3,若是则进入步骤9;若否则进入步骤10;
56.步骤9:开启一次辅助换气时序,不论结束与否,等待至本道洗净结束、排水、进入下一道洗净时序,在下一道时序开始后返回步骤3;
57.步骤10:持续进行洗净过程,直至本道洗净结束、排水、进入到下一道洗净过程,下一道洗净开始后返回步骤3。
58.通过上述控制流程可知,该系统能输出较为稳定的内腔压力、减少蒸汽外溢,甚至可以替代呼吸器呼吸口的大部分功能,彻底隔绝呼吸器蒸汽外溢的出口。另外,也使得洗净结束后橱柜内部空气湿度维持在一个优良的水平(不会因蒸汽外溢导致空气潮湿),因此对热风组件十分有利,抽进机器内腔的空气即为干燥的热风,大大提升了干燥效率。
59.具体地,排气时序中,排气风扇单次开启30s后停止,每次工作间隔5min。换气时序中,热风组件的换气风扇和排气组件的排气风扇同步工作15s后停止,单次且不重复,直到排水进入下一道时序。水温预设值t1、t2用于辅助判断,通常可设定为即将产生大量蒸汽的温度值,例如60℃等。
60.此外,定时主动排气时序和辅助换气时序还可以根据湿度值情况相应调整,当湿度值增速高于设定时,可将排气时序的实际动作时长延长到60s或120s。当呼吸器组件湿度探测点处的湿度值增速较快且快速高于设定值时,可将换气时序的实际动作时长延长至30s或60s,甚至在同一道洗净时序内重复进行动作(如每隔5min进行一次)。
61.在本发明的说明书及权利要求书中使用了表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”、“侧”、“顶”、“底”等,用来描述本发明的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明的目的,是基于附图中显示的示例方位而确定的。由于本发明所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制,比如“上”、“下”并不一定被限定为与重力方向相反或一致的方向。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。