1.本发明涉及移相干涉技术领域,特别是一种基于深度神经网络的干涉图自动配准和相位解包方法。
背景技术:
2.移相式激光干涉仪一般通过激光器波长调谐或者通过压电陶瓷片(pzt)推动参考镜产生调制相位,然后图像采集系统利用光电探测器(如ccd)采集不同移相量的干涉图,常用的移相干涉法采用四步移相法,对于采集到的干涉图的处理过程一般包括相位计算和相位解包两个步骤。
3.在相位计算过程中,由于采集系统系统中存在外部干扰,抖动等因素,导致不同移相量的干涉图存在旋转偏移等现象,难以精确配准,从而导致计算的包裹相位存在相位恢复误差,而设计一个非常稳定的干涉系统需要非常高的成本,且对环境稳定性依赖程度高。为解决上述问题,一些学者提出了一系列方法,如使四幅干涉图具有相似的灰度分布,采用互相干运算确定干涉图之间的位置匹配关系;通过圆载频处理技术得到每个子图的基频能量和相位信息,通过各个子图之间的相位差矫正位置匹配误差和移相量误差,然而这些方法计算过程复杂,难以在动态测量系统中应用。
4.在由包裹相位计算真实相位的相位解包过程中,常用的解包算法如路径追踪算法,在噪声水平较大时会出现解包误差,系统欠采样时采集数据中相邻两点间的差值会超过π使得解包错误,另外常用的最小范数法如预处理共轭梯度算法迭代过程十分复杂,所占用时间长。总之,现有相位计算和相位解包过程中存在相位恢复准确度差和计算时间长的问题。
技术实现要素:
5.本发明的目的在于提供一种快速、准确的基于深度神经网络的干涉图自动配准和相位解包方法。
6.实现本发明目的的技术解决方案为:一种基于深度神经网络的干涉图自动配准和相位解包方法,包括以下步骤:
7.步骤s1、通过仿真生成二维真实相位,并计算二维包裹相位,添加噪声;
8.步骤s2、根据二维包裹相位计算生成相应光强干涉图,通过对图像随机平移旋转来模拟实际采集中存在的系统抖动,生成数据集;
9.步骤s3、设置深度神经网络模型结构、参数、优化算法,使用混合损失函数和步骤2生成的数据集对深度神经网络模型进行训练;
10.步骤s4、根据结构相似度、峰值信噪比等评价指标,判断相位恢复效果是否满足要求,若满足则进入调制步骤s5;不满足则更改网络结构,修改优化函数、学习率和损失函数等参数的数值,并转至步骤s3重新训练;
11.步骤s5、将真实系统采集的光强干涉图,作为训练后深度神经网络模型的输入,经
计算得到预测的真实相位。
12.本发明与现有技术相比,其显著优点为:(1)直接从干涉图计算其真实相位,不需要对各个不同移相量的干涉图配准再计算包裹相位和真实相位,减少了计算时间,可以在动态测量中使用;(2)抗噪声能力强,常用的相位解包算法如最小路径算法,在噪声等级较大时会出现解包错误的现象,本发明在数据集生成阶段通过给包裹相位添加不同种类、不同等级的噪声,提高了网络对去除不同级别噪声的泛化能力,提高了相位解包的精确性。
附图说明
13.图1是本发明基于深度神经网络的干涉图自动配准和相位解包方法的流程图。
14.图2是本发明生成的初始矩阵的三维直方图。
15.图3是本发明生成的真实相位的曲面图。
16.图4是本发明生成的真实相位与添加了噪声的包裹相位的二维平面图。
17.图5是经过平移旋转变换并裁剪了中心区域的光强干涉图。
18.图6是使用的卷积神经网络结构图。
19.图7是使用的残差块的结构图。
20.图8是网络计算输出的真实相位图。
具体实施方式
21.本发明的目的在于提供一种基于深度神经网络的干涉图自动配准和相位解包方法,解决传统光强干涉恢复算法抗噪声能力差,存在系统抖动造成相位平移旋转使得恢复相位不准确及计算时间长等问题。
22.结合图1,本发明一种基于深度神经网络的干涉图自动配准和相位解包方法,包括以下步骤:
23.步骤s1、通过仿真生成二维真实相位,并计算二维包裹相位,添加噪声;
24.步骤s2、根据二维包裹相位计算生成相应光强干涉图,通过对图像随机平移旋转来模拟实际采集中存在的系统抖动,生成数据集;
25.步骤s3、设置深度神经网络模型结构、参数、优化算法,使用混合损失函数和步骤2生成的数据集对深度神经网络模型进行训练;
26.步骤s4、根据结构相似度、峰值信噪比等评价指标,判断相位恢复效果是否满足要求,若满足则进入调制步骤s5;不满足则更改网络结构,修改优化函数、学习率和损失函数这些参数的数值,并转至步骤s3重新训练;
27.步骤s5、将真实系统采集的光强干涉图,作为训练后深度神经网络模型的输入,经计算得到预测的真实相位。
28.作为一种具体示例,步骤s1中,通过仿真生成二维真实相位,并计算二维包裹相位,添加噪声,具体如下:
29.s11、随机生成大小在特定区间内的矩阵,矩阵的数值在设定区间内,且满足高斯分布或均匀分布之一;随机选择一种插值算法,将初始矩阵扩展,作为真实相位ω;
30.s12、根据公式计算包裹相位并随机从椒盐噪声、高斯噪声中选
择一种添加至包裹相位
31.作为一种具体示例,所述s12中,随机从椒盐噪声、高斯噪声中选择一种添加至包裹相位具体如下:
32.函数angle表示计算复数的相位角,函数值在[-π,π]中,先将包裹相位除以π,再从椒盐噪声、高斯噪声中随机选择其一添加至包裹相位,其中椒盐噪声密度为0.01~0.2之间的随机数,高斯噪声标准差为0.01~0.20之间的随机数,添加噪声完成后,再将相位乘以π恢复其数值范围。
[0033]
作为一种具体示例,步骤s2中,根据二维包裹相位计算生成相应光强干涉图,具体如下:
[0034]
s21、随机生成大小在设定区间内的矩阵,矩阵的数值在设定区间内,且满足均匀分布;选择一种插值算法,将初始矩阵扩展,作为背景光强a;
[0035]
s22、随机生成大小在设定区间内的矩阵,矩阵的数值在设定区间内,且满足均匀分布;选择一种插值算法,将初始矩阵扩展,作为对比度项v;
[0036]
s23、采用四步移相法,对于已经添加噪声的包裹相位生成四个不同移相相位的光强干涉图
[0037][0038][0039][0040][0041]
s24、对生成的光强干涉图随机旋转-10
°
至10
°
,随机纵向和横向循环平移-20到20个像素,从中心区域截取大小为256
×
256的部分作为最终的光强干涉图,同时真实相位也截取中心区域大小为256
×
256的部分作为最终的光强干涉图。
[0042]
作为一种具体示例,步骤s3中所述设置深度神经网络模型结构、参数、优化算法,其中优化算法采用adam算法,网络模型结构如下:
[0043]
深度神经网络模型结构基于残差块的u-net,光强干涉图作为网络输入,输出对应真实相位;
[0044]
深度神经网络模型包括编码器、瓶颈层、解码器;编码器有4层,每一层由2连续的残差块构成,每一层的输出作为下一层的输入和对应解码器层的输入;瓶颈层包含2个连续的残差块;解码器和编码器的层数相同,每一层包含一个上采样层和2个连续的残差块用于特征的解码;解码器最后一层输出的特征图经过1
×
1卷积后输出真实相位。
[0045]
作为一种具体示例,步骤s3中所述使用混合损失函数和步骤2生成的数据集对深度神经网络模型进行训练,混合损失函数l
mix
(x,y)的公式如下:
[0046]
l
mix
(x,y)=α1l
l1
(x,y) α2l
ms-ssim
(x,y)
[0047]
其中α1和α2为超参数,α1设置为0.14,α2设置为0.86;
[0048]
平均绝对误差损失l
l1
(x,y)公式为:
[0049][0050]
其中,x表示实际的真实相位,y表示深度神经网络模型网络输出的预测真实相位,n表示真实相位的矩阵元素个数;
[0051]
多尺度结构相似度损失l
ms-ssim
(x,y)公式为:
[0052][0053]
其中,cj、sj分别表示将原图像进行j次连续的低通滤波和采样间隔为2的下采样后计算对比度项、结构项,m表示连续的低通滤波总次数;
[0054]
亮度项l(x,y)公式为:
[0055][0056]
对比度项c(x,y)公式为:
[0057][0058]
结构项s(x,y)公式为:
[0059][0060]
其中,μ
x
,μy分别代表x和y的均值,σ
x
,σy分别代表x和y的标准差,σ
xy
表示x和y的协方差,c1,c2,c3是常数值,满足:
[0061]
c1=(k1l)2[0062]
c2=(k2l)2[0063]
c3=c2/2
[0064]
其中k1=0.01,k2=0.03,l=2
b-1,b=8。
[0065]
下面结合附图及具体实施例对本发明作进一步详细描述。
[0066]
实施例
[0067]
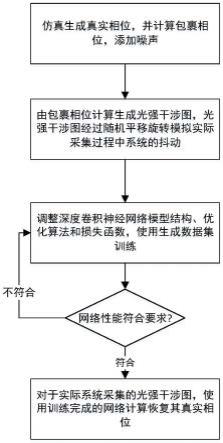
结合图1,本实施例基于深度神经网络的光强干涉图自动配准和相位解包方法,包括以下步骤:
[0068]
步骤s1、生成特定大小的随机矩阵,通过插值算法生成真实相位,由真实相位生成包裹相位,并对包裹相位添加一定的噪声;
[0069]
更进一步的,方法步骤如下:
[0070]
s11、随机生成一个方阵(大小在2
×
2到25
×
25之间,数值范围2-30),分布类型为均匀分布或高斯分布之一,如图2所示,再随机从最近邻插值,二次插值,双三次插值中选择一种方法将矩阵扩展至320
×
320,作为真实相位,图3是真实相位的曲面图。
[0071]
s12、根据公式计算包裹相位,其中ω是真实相位,是包裹相位,函数angle表示计算复数的相位角,值在[-π,π]中,先将包裹相位除以π,再随机从椒盐噪
声,高斯噪声中随机选择其一添加至包裹相位,其中椒盐噪声密度为0.01至0.2之间的随机数,高斯噪声标准差在0.01至0.20,添加噪声完成后,再将相位乘以π恢复其原始数值范围,图4中左图是真实相位,右图是添加了噪声的包裹相位。
[0072]
步骤s2、包裹相位生成光强干涉图,光强干涉图经过随机平移旋转后,截取中心区域作为最终干涉相位;
[0073]
更进一步的,方法步骤如下:
[0074]
s21、随机生成一个方阵(大小在2
×
2到5
×
5之间,数值范围在0-1),且满足均匀分布;通过线性插值算法,将初始矩阵扩展为320
×
320的矩阵,再将数值范围线性映射到0.7-1,作为背景光强a;
[0075]
s22、随机生成一个方阵(大小在2
×
2到5
×
5之间,数值范围在0-1),且满足均匀分布;通过线性插值算法,将初始矩阵扩展为320
×
320的矩阵,再将数值范围线性映射到0.7-1,作为对比度项v;
[0076]
s23、采用四步移相法,对于已经添加噪声的包裹相位生成四个不同移相相位的光强干涉图:
[0077][0078][0079][0080][0081]
s24、对生成的光强干涉图和随机旋转-10
°
至10
°
,并随机纵向和横向循环平移-20到20个像素,再从所有光强干涉图的中心区域截取大小为256
×
256的部分作为最终的光强干涉图,同时真实相位也截取中心区域大小为256
×
256的部分作为最后的真实相位,图5是截取了中心区域的四幅干涉图。
[0082]
步骤s3、调整深度神经网络结构,优化算法,损失函数,使用生成数据集训练。
[0083]
所述卷积神经网络机构如图6所示,神经网络包含一个四层的编码器,一个瓶颈层,一个四层的解码器,编码器的每层有两个连续的残差块组成,每一层编码器的输出作为下一层编码器的输入,同时经过跳跃连接作为相同层次解码器的输入,每层解码器接受前一层的输出经过pixelshuffle操作上采样后,和对应层次编码器的输出拼接后,再经过两个连续的残差块后,作为下一层的输入,最后一层解码器的输出特征图经过1x1的卷积后得到最终的输出。残差块的结构如图7所示,其中包含四个3
×
3卷积和1个1
×
1卷积,当残差块的输出特征图的高宽减半时,第一个3
×
3卷积的步长为2,padding为1,否则步长为1,同时第一个3
×
3卷积实现特征图的通道数变化,后三个3
×
3卷积层步长始终为1,输入通道数和输出通道数不变。
[0084]
所使用的混合损失函数公式如下:
[0085]
l
mix
(x,y)=α1l
l1
(x,y) α2l
ms-ssim
(x,y)
[0086]
其中平均绝对误差损失公式为:
[0087][0088]
其中,x代表实际的真实相位,y代表网络输出的预测真实相位,n代表真实相位的矩阵元素个数。
[0089]
多尺度结构相似度损失公式为:
[0090][0091]
其中亮度项公式:
[0092][0093]
对比度项公式:
[0094][0095]
结构项公式:
[0096][0097]
其中μ
x
,μy分别代表x和y的均值,σ
x
,σy分别代表x和y的标准差,σ
xy
表示x和y的协方差,c1,c2,c3是常数值,满足:
[0098]
c1=(k1l)2[0099]
c2=(k2l)2[0100]
c3=c2/2
[0101]
其中k1=0.01,k2=0.03,l=2
b-1,此处b=8。
[0102]cj
与sj分别表示将原图像进行j次连续的低通滤波和采样间隔为2的下采样后计算对比度和结构,α1和α2为超参数,设置为0.14和0.86。
[0103]
步骤s4,通过评价指标如结构相似度,均方根误差,峰值信噪比的大小判断相位恢复效果是否满足要求,若满足则调制步骤s5;否则对模型结构、参数调整,并转至步骤s3重新训练,图8是训练完成的网络计算输出的真实相位。
[0104]
步骤s5、由真实系统采集的光强干涉图作为网络输入,经网络计算得到真实相位。
[0105]
综上所述,本发明直接从干涉图计算其真实相位,不需要对各个不同移相量的干涉图配准再计算包裹相位和真实相位,减少了计算时间,可以在动态测量中使用。此外,本发明抗噪声能力强,常用的相位解包算法如最小路径算法,在噪声等级较大时会出现解包错误的现象,本发明在数据集生成阶段通过给包裹相位添加不同种类、不同等级的噪声,提高了网络对去除不同级别噪声的泛化能力,提高了相位解包的精确性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。