一种基于双二阶sogi的双凸极电机无位置传感器方法
技术领域
1.本发明涉及电机控制领域,尤其涉及一种基于双二阶sogi的双凸极电机无位置传感器方法。
背景技术:
2.电励磁双凸极电机(doubly salient electromagnetic machine,dsem)是一种新型磁阻类电机,其转子上无绕组,凭借其结构简单,可靠性高,且气隙磁通调节灵活,在航空航天、新能源等领域有着广泛的应用前景。然而该电机作为电动机运行时,或者用于可控整流发电机运行时通常需要准确的转子位置信息以实现换相,而采用传统机械式位置传感器会降低系统可靠性,增加成本,限制该电机的应用范围。因此研究dsem无位置传感器控制方法具有重要意义。
3.针对中高速无位置传感器技术,刘伟峰等公开的“基于线磁链的三相电励磁双凸极电机无位置传感器方法”(中国,公开号:cn106100499a)专利通过提取双凸极电机磁链特征量实现换相,该方法通过检测线磁链负向过零点来间接得到转子位置信息,且一个周期只能检测三个离散点,无法实时获取转子位置信息。基于双二阶广义积分器锁频环的基波正序分量检测方法.吴振军.载《轻工学报》.2017文章中,将二阶sogi应用于电网中,只实现了一阶处理,无法消除直流分量,本发明应用于电机无位置传感器控制中,实现了二阶处理,且消除了直流分量。
4.目前锁相环广泛应用于电机转子位置实时估计中,这就需要对特征量信号进行滤波处理。通常采用低通滤波器对信号进行处理,但是存在响应速度慢、相位偏移等缺点。采用二阶广义积分器(second-order generalized integrator,sogi)可以有效地抑制直流与谐波分量,提取出的信号既无幅值衰减,也无相位偏移,但是一阶sogi无法完全消除直流分量,且可能受到未知频率的输入谐波影响,这势必会降低锁相环估算转子位置的精度。
技术实现要素:
5.本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种双二阶sogi的双凸极电机无位置传感器技术,具有更强的直流抑制和谐波衰减能力,能够更加准确提取出线磁链的基波正序分量,实现电励磁双凸极电机转子位置的实时精确估计。
6.为了实现上述目的,本发明采用如下的技术方案:本发明所述方法主要包括克拉克坐标变换、两路二阶sogi、一个正序分量提取模块和一个锁相环控制环路四个部分。
7.所述方法包括以下步骤:
8.步骤1,采样电机的三相电压和电流,通过积分计算得到三相线磁链信号ψ
ab
、ψ
bc
、ψ
ac
;
9.步骤2,将步骤1计算三相线磁链信号通过克拉克变换得到两相静止坐标系下的线磁链信号ψ
α
、ψ
β
;
10.步骤3,将步骤2得到的α,β轴的线磁链信号分别通过二阶sogi进行滤波处理,得到
两组正交基波分量ψ
α
′
、qψ
α
′
和ψ
β
′
、qψ
β
′
;
11.步骤4,将两组正交基波分量经过正序分量提取模块进行运算后得到α,β轴的线磁链基波正序分量ψ
α
、ψ
β
;
12.步骤5,将线磁链的基波正序分量经过静止坐标系下的锁相环得到电机转子的位置信息,同时将锁相环输出估计频率反馈给二阶sogi形成闭环控制,动态调整积分器的谐振点。
13.作为优选,步骤2中两相静止坐标系下的线磁链信号ψ
α
、ψ
β
可表示为:
[0014][0015]
其中,ψ=[ψ
α ψ
β
]
t
;a0是直流分量,a0=[a
0α a
0β
]
t
;是基波分量,a1是基波幅值,a1=[a
1α a
1β
]
t
;是各谐波分量之和,ah是谐波幅值,ah=[a
hα a
hβ
]
t
;分别是基波、谐波的初始角,ω1、ωh分别是对应的角频率,h是谐波次数。
[0016]
作为优选,步骤3所述二阶sogi的传递函数为:
[0017][0018][0019]
其中k1、k2是二阶sogi的两个增益,ω
′
是谐振点对应的角频率。
[0020]
将α,β轴的线磁链信号分别通过二阶sogi进行滤波处理,得到其基波分量的稳态时域表达式为
[0021][0022][0023]
其中ψ'=[ψ
α
' ψ
β
']
t
,qψ'=[qψ
α
' qψ
β
']
t
;k是谐波幅值衰减系数,k《《1;γh是谐波相移。
[0024]
作为优选,步骤5中将线磁链基波正序分量ψ
α
、ψ
β
作为锁相环的输入,可得到转子位置估计误差表达式为:
[0025][0026]
其中该误差经过一个比例-积分器和积分环节后调节至0,使得实现转子位置的精确估计。同时锁相环输出估计频率反馈到二阶sogi,形成闭环控制。
[0027]
本发明采用以上技术方案与现有技术相比,具有以下有益效果:
[0028]
1.本发明利用两路二阶sogi提取线磁链基波分量,既无幅值衰减又无相位延迟,相较于一阶sogi,完全消除了直流分量,更有效地抑制谐波。同时锁相环的应用实现了二阶sogi的谐振频率的自适应调整,提高了控制精度;
[0029]
2.本发明既可以通过模拟电路实现,也可以通过数字控制算法实现,实现方式灵活简便,且无需增加额外硬件电路,控制方法简单可靠;
[0030]
3.本发明具有较高的普适性、控制精度高、实时性强、鲁棒性高,不仅适用于三相电磁特性高度不对称的磁阻电机,也适用于其他各类电机。
附图说明
[0031]
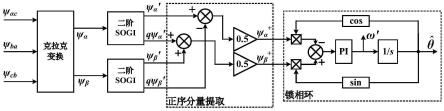
图1是基于双二阶sogi的无位置传感器控制框图。
[0032]
图2是本发明实施例电机采用的可控整流发电控制系统的电路示意图。
[0033]
图3是本发明所提的二阶sogi的结构框图。
[0034]
图4(a)、(b)分别是图3滤波器d(s)、q(s)的伯德图。
[0035]
图5是采用二阶sogi的线磁链基波正序分量波形及其轨迹圆。
具体实施方式
[0036]
下面结合附图对本发明的技术方案做进一步的详细说明。下面通过参考附图描述的实施方式是实例性的,仅用于解释本发明,而不能解释为本发明的限制。
[0037]
本发明公开了一种基于双二阶sogi的双凸极电机无位置传感器方法,如图1所示。主要包括克拉克坐标变换、两路二阶sogi、一个正序分量提取模块和一个锁相环控制环路四个部分。具体按照以下步骤实施:
[0038]
步骤1,采样电机的三相电压和电流,通过积分计算得到三相线磁链信号ψ
ab
、ψ
bc
、ψ
ac
;
[0039]
步骤2,将步骤1计算三相线磁链信号通过克拉克变换得到两相静止坐标系下的线磁链信号ψ
α
、ψ
β
;
[0040]
步骤3,将步骤2得到的α,β轴的线磁链信号分别通过二阶sogi进行滤波处理,得到两组正交基波分量ψ
α
′
、qψ
α
′
和ψ
β
′
、qψ
β
′
;
[0041]
步骤4,将两组正交基波分量经过正序分量提取模块进行运算后得到α,β轴的线磁链基波正序分量ψ
α
、ψ
β
;
[0042]
步骤5,将线磁链的基波正序分量经过静止坐标系下的锁相环得到电机转子的位置信息,同时将锁相的角频率反馈给二阶sogi形成闭环控制,动态调整积分器的谐振点。
[0043]
电励磁双凸极电机可控整流发电控制系统的硬件结构如图2所示,包括三相电励磁双凸极电机、三相全桥整流器,端电压采样调理电路,相电流采样调理电路以及控制电路。对于谐波含量较大的电励磁双凸极电机,通过采样调理电路获取三相端电压ua、ub、uc和相电流ia、ib、ic,从而通过计算得到三相线磁链。以a相和c相为例,线磁链ψ
ac
的表达式为
[0044]
ψ
ac
=∫[u
ac-r
·
(i
a-ic)]dt-ψ
ac
(0)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0045]
其中u
ac
是线电压;r是相绕组内阻;ia、ic分别是a相、c相电流;ψ
ac
(0)是初始线磁链。
[0046]
将得到的三相线磁链信号通过克拉克变换得到两相静止坐标系下的线磁链信号ψ
α
、ψ
β
,变换过程表达式为
[0047]
[0048]
ψ
α
、ψ
β
包含直流分量、基波分量以及各次谐波分量,可表示为:
[0049][0050]
其中,ψ=[ψ
α ψ
β
]
t
;a0是直流分量,a0=[a
0α a
0β
]
t
;是基波分量,a1是基波幅值,a1=[a
1α a
1β
]
t
;是各谐波分量之和,ah是谐波幅值,ah=[a
hα a
hβ
]
t
;分别是基波、谐波的初始角,ω1、ωh分别是对应的角频率,h是谐波次数。
[0051]
而只有基波分量可用于转子位置估计,故需要对ψ
α
、ψ
β
进行滤波处理以提取其基波分量。本发明采用二阶sogi作为滤波器。将ψ
α
、ψ
β
分别通过二阶sogi进行滤波处理,得到两组正交基波分量ψ
α
′
、qψ
α
′
和ψ
β
′
、qψ
β
′
。二阶sogi的结构如图3所示,其传递函数为
[0052][0053][0054]
其中k1、k2是二阶sogi的两个增益,ω
′
是谐振点对应的角频率。可以看出二阶sogi具有四阶传递函数。
[0055]
其基波分量的稳态时域表达式为
[0056][0057][0058]
其中ψ'=[ψ
α
' ψ
β
']
t
,qψ'=[qψ
α
' qψ
β
']
t
;k是谐波幅值衰减系数,k《《1;γh是谐波相移。
[0059]
图4给出了二阶sogi的伯德图。结合式(6)和(7)可以看出,线磁链的直流分量被消除,同时除了谐振频率ω
′
,其他频率下的谐波得到了更大的衰减,提高了基波分量的提取精度。
[0060]
将两组正交基波分量经过正序分量提取模块进行运算后得到α,β轴的线磁链基波正序分量ψ
α
、ψ
β
,计算表达式为
[0061][0062]
最后通过锁相环技术获得电机转子的位置信息用于系统控制,同时锁相环输出估计频率反馈给二阶sogi形成闭环控制,从而提高滤波器的滤波效果,具体的,得到转子位置估计误差表达式为:
[0063][0064]
其中该误差经过一个比例-积分器和积分环节后调节至0,使得实现转子位置的精确估计。
[0065]
为了验证本发明的有效性,在matlab/simulink中进行仿真。电机转速为3000rpm,
励磁电流为15a。图5为采用二阶sogi的线磁链基波正序分量波形及其轨迹圆。可以看出ψ
α
、ψ
β
相互正交,且没有直流偏置与波形失真,其运动轨迹成圆形。
[0066]
通过上述步骤即可实现电励磁双凸极电机线磁链基波分量的精确提取,消除了直流分量,更有效地抑制了谐波分量,估计的转子位置更加精确,保证系统无位置传感器控制性能,不仅适用于电动系统,也适用于可控整流发电系统。
[0067]
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
[0068]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
