一种基于cgan来解决襟翼优化中出现剪刀叉问题的方法
技术领域
1.本发明属于飞机设计领域,涉及人工智能技术在飞机设计中的应用,具体涉及一种基于cgan来解决襟翼优化中出现剪刀叉问题的方法。
背景技术:
2.大型飞机增升装置对于提升其起降性能有重要作用,是大飞机设计中的一项关键技术。大型飞机的增升装置设计不仅要满足气动要求,还需满足包括机构、结构等在内的综合性能。现有大型飞机后缘增升装置均采用两片襟翼的构型,在起飞、着陆阶段襟翼打开时,要求襟翼间尽可能对齐,如图1所示的两片襟翼前后、交叉、上下错位形成剪刀叉是不允许的。但在襟翼位置的优化设计中,内外襟翼各自的旋转轴(内段用两个参考点和表示,外段为和)、偏角(内段为θ
in
,外段θ
out
)都是相互独立的,这会导致优化算法给出的襟翼位置大概率不满足这种剪刀叉要求。该问题的实质是,外段襟翼的优化变量范围会随着内段襟翼参数的改变而改变。本专利提出一种基于条件对抗生成神经网络的方法,使得优化算法能够生成满足剪刀叉要求的外段襟翼位置,从而满足气动优化的需求。
3.在襟翼优化中,气动计算所消耗的时间、计算成本最为显著。而在已知襟翼参数(θ
in
、θ
out
)下计算襟翼的起飞、着陆位置空间坐标非常容易,相对于气动计算而言所消耗的计算成本可以忽略不计。因此在优化过程中要考虑尽可能减少因不满足剪刀叉而导致无效的或意义较小的气动计算,实质是外段襟翼的参数合理取值范围随着内段参数的改变而改变,优化算法要在给出内段襟翼参数后,采样合适的外段襟翼参数。
4.目前解决该问题,基本为两大途径:
5.1、在优化中,如果优化算法给出的构型不满足剪刀叉要求,则给予优化算法较大的负反馈。
6.2、拟合外段襟翼参数。通过某种拟合手段,将外段襟翼视为内段襟翼的函数,即:
[0007][0008]
该方法即将外段襟翼视为“随动”,不再将其参数视为优化变量。
[0009]
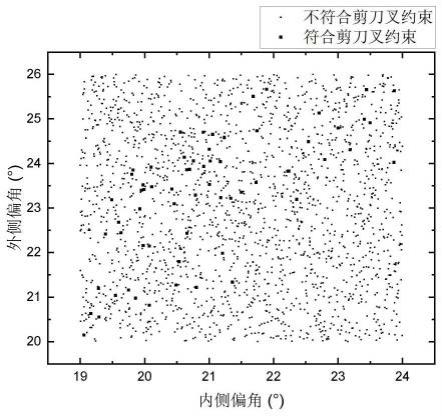
对于现有方法1,以某远程宽体飞机模型为例进行了测试,在整个优化变量范围内采用拉丁超立方采样,生成的样本中,起飞构型符合剪刀叉要求的襟翼位置占所有采样点的3.2%,而着陆构型只有1.7%,图2和图3分别展示了起飞构型和着陆构型采样的内外段襟翼偏角。如果采用该方法,那优化算法在气动优化过程中,将大概率采样到不符合剪刀叉要求的点,从而获取负反馈。而大量的负反馈容易使得优化算法发散,从而无法得到优秀的襟翼位置参数。
[0010]
对于现有方法2,直接将外段襟翼参数不视为优化变量,这实际上导致了优化空间的压缩,襟翼最优参数将有极大的概率不落在其中。
技术实现要素:
[0011]
针对上述问题,本发明提出一种基于cgan来解决襟翼优化中出现剪刀叉问题的方法,采用了条件生成对抗神经网络,通过生成器与判别器的相互博弈,以大量符合剪刀叉的数据为样本,使生成器能够输出符合剪刀叉要求的数据,以方便进行气动优化。采用该方法,既能使襟翼优化过程中更多考虑气动性能的提升,避免优化算法因收到大量不符合剪刀叉的负反馈而发散,同时不对样本空间进行过度压缩,导致最优解性能的下降。
[0012]
本发明方法基于cgan来解决襟翼优化中出现剪刀叉问题的方法,分以下步骤:
[0013]
一种基于cgan来解决襟翼优化中出现剪刀叉问题的方法,其特征在于:具体步骤为:
[0014]
步骤1:通过拉丁超立方采样方法,对给定的优化变量进行采样,包括内段襟翼优化变量与外段襟翼参数;内段襟翼参数标量形式为外段襟翼参数标量形式为θ
out
;其中,和为确定一条空间直线的两个参考点,以x、z坐标视为优化变量,内段襟翼优化变量总计为外段襟翼优化变量总计为上述内段襟翼旋转轴参考点1的x坐标和z坐标,为内段襟翼旋转轴参考点2的x坐标和z坐标;为外段襟翼旋转轴参考点1的x坐标和z坐标,为外段襟翼旋转轴参考点2的x坐标和z坐标。
[0015]
步骤2:依次计算样本库a中的样本是否满足剪刀叉要求,将符合要求的样本组成样本库b。
[0016]
步骤3:对于样本库b中的每一个样本,都随机生成一组虚拟数向量。
[0017]
步骤4:构建一个生成器神经网络,和一个判别器神经网络,并初始化。
[0018]
生成器的输入为10个,其中5个输入对应内段襟翼的优化变量另5个输入对应随机生成的一组虚拟数向量λ1,λ2,λ3,λ4,λ5;生成器的输出为5个,对应外段襟翼的优化变量判别器的输入为15个,其中,5个输入对应另5个输入对应λ1,λ2,λ3,λ4,λ5,剩余5个输入对应输出为1个。
[0019]
步骤5:采用adam法对判别器进行第一次训练,损失函数为:
[0020]
lossd1=mes(y,cos(α))
[0021]
式中,mes()为求均方误差;y表示判别器的实际输出;cos(α)为余弦相似度;
[0022]
步骤6:将步骤5中随机抽的样本的前5个参数和后5个参数组成新序列输入至生成器中,由生成器生成上标表示该数据是由生成器生成;进一步将序列输入至判别器中,采用adam法对判别器进行第二次训练,判别器第二次训练的损失函数为:
[0023]
lossd2=mes(y,-1)
[0024]
其中,y表示判别器的实际输出。
[0025]
步骤7:应用步骤5中所抽取的样本,采用adam法训练一次生成器,其损失函数为:
[0026]
lossg=mes(y,1)。
[0027]
步骤8:重复步骤5至7,直到最大训练数,得到训练好的生成器应用于典型气动优化框架中。
[0028]
本发明的优点在于:
[0029]
1、本发明基于cgan来解决襟翼优化中出现剪刀叉问题的方法,将剪刀叉约束带入至气动优化中,避免优化过程中采样大量不符合剪刀叉约束的样本导致无效的气动计算,同时避免优化算法因收到大量负反馈而发散。
[0030]
2、本发明基于cgan来解决襟翼优化中出现剪刀叉问题的方法,修改传统生成对抗神经网络中判别器第一次训练的损失函数,引入了向量相似度,使生成的外段襟翼数据尽可能与虚拟数相似,从而使能够生成的样本足够丰富,不压缩优化变量的取值范围。
[0031]
1、本发明基于cgan来解决襟翼优化中出现剪刀叉问题的方法,向量相似度的引入,使得生成器生成的数据与虚拟数向量相似,生成器产生的数据与虚拟数的关系基本保持单调性,不增加优化算法寻找最优解的难度。
附图说明
[0032]
图1a为襟翼设计过程中,内外襟翼之间产生的前后错位剪刀叉现象;
[0033]
图1b为襟翼设计过程中,内外襟翼之间产生的交叉错位剪刀叉现象;
[0034]
图1c为襟翼设计过程中,内外襟翼之间产生的上下错位剪刀叉现象;
[0035]
图2为根据现有方法1,对某宽体客机起飞构型进行采样的结果;
[0036]
图3为根据现有方法1,对某宽体客机着陆构型进行采样的结果;
[0037]
图4为本发明基于cgan来解决襟翼优化中出现剪刀叉问题的方法的实施框架;
[0038]
图5为利用本发明方法训练完的生成器进行襟翼气动优化的框架;
[0039]
图6为利用本发明方法训练完的生成器对某宽体客机起飞构型进行采样的结果;
[0040]
图7为利用本发明方法训练完的生成器对某宽体客机着陆构型进行采样的结果。
具体实施方式
[0041]
本发明基于条件生成对抗神经网络来解决襟翼剪刀叉引起的优化变量动态变化的方法,如图4所示,具体步骤为:
[0042]
步骤1:通过拉丁超立方采样方法,对给定的优化变量,包括内段襟翼参数(标量形式为),外段襟翼参数(标量形式为)进行采样,存入样本库a中。其中和,为确定一条空间直线的两个参考点。这两个参考点只包含四个变量,本发明中以x、z坐标视为优化变量,因此内段襟翼优化变量总计为外段襟翼优化变量总计为上述内段襟翼旋转轴参考点1的x坐标和z坐标,为内段襟翼旋转轴参考点2的x坐标和z坐标;为外段襟翼旋转轴参考点1的x坐标和z坐标,为外段襟翼旋转轴参考点2的x坐标和z坐标。
[0043]
步骤2:依次计算样本库a中的样本是否满足剪刀叉要求,将符合要求的样本组成
样本库b。
[0044]
剪刀叉计算过程为,选取内段襟翼外侧任意一点q
in
和外段襟翼内侧截面的一点q
out
,且襟翼处于巡航位置时该两点的位置是完全重合的。襟翼打开位置下,通过有限螺旋位移矩阵[rh]可以计算出这两点的襟翼打开位置下坐标与
[0045][0046]
其中,表示为内段襟翼的有限螺旋位移矩阵,为外段襟翼的有限螺旋位移矩阵;与分别为q
in
与q
out
两点巡航位置的坐标。进一步计算与点之间的距离是否满足要求。
[0047]
步骤3:对于样本库b中的每一个样本,都随机生成一组虚拟数向量(λ1,λ2,λ3,λ4,λ5)与之对应,每个元素λ的值均在0-1之间。此时样本库b中的每一个样本可以表示为
[0048]
步骤4:构建一个生成器神经网络,和一个判别器神经网络,并初始化。
[0049]
如图4所示,生成器的输入为10个,其中5个输入对应内段襟翼的优化变量另5个输入对应随机生成的一组虚拟数向量λ1,λ2,λ3,λ4,λ5;生成器的输出为5个,对应外段襟翼的优化变量判别器的输入为15个,其中,5个输入对应另5个输入对应λ1,λ2,λ3,λ4,λ5,剩余5个输入对应输出为1个。
[0050]
步骤5:采用adam法对判别器进行第一次训练。
[0051]
从样本库中b随机抽取一条样本通过式(2)计算余弦相似度cos(α)。
[0052][0053]
其中,ni为第i个优化变量mi为第i个随机生成的虚拟数元素(λ1,λ2,λ3,λ4,λ5)。
[0054]
判别器第一次训练的损失函数为lossd1与经典生成对抗神经网络不同,为:
[0055]
lossd1=mes(y,cos(α))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0056]
式中,mes()为求均方误差;y表示判别器的实际输出。
[0057]
该损失函数考虑了虚拟数向量与生成的外段襟翼参数的相似性。
[0058]
在经典的生成对抗神经网络设计中,只要求生成的数据满足要求,而对于襟翼位置的优化问题而言,还要求生成的数据足够丰富以最大限度减少变量空间的过度压缩。本发明采用余弦相似度评价虚拟数与生成数据的相似性,以求生成的数据尽可能与虚拟数向量接近,从而尽可能地增加数据丰富性。
[0059]
步骤6:将步骤5中随机抽的样本的前5个参数和后5个参数组成新序列输入至生成器中,由生成器生
成上标表示该数据是由生成器生成。进一步将序列输入至判别器中,采用adam法对判别器进行第二次训练,判别器第二次训练的损失函数为lossd2:
[0060]
lossd2=mes(y,-1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0061]
其中,y表示判别器的实际输出。
[0062]
步骤7:应用步骤5中所抽取的样本,采用adam法训练一次生成器,其损失函数为lossg,其中y表示判别器的实际输出。
[0063]
lossg=mes(y,1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0064]
步骤8:重复步骤5至7,直到最大训练数;本发明中最大训练数设定为20000次。至此得到训练好的生成器,能够在如图5所示的典型气动优化框架中使用。
[0065]
同样以某远程宽体飞机模型为例进行了测试,如图6和7所示,结果表明,起飞构型生成的样本符合剪刀叉要求的概率上升到了93.3%,而着陆构型上升到了82.0%,这说明训练好的生成器能够生成符合要求的样本。同时从图6和图7中可以看出,襟翼偏角参数仍旧能覆盖较大范围,数据的丰富性并没有下降。此外,外侧襟翼显然随着内侧襟翼偏角的增加而增加,这也符合普遍认知,说明训练好的生成器能够生成合适的数据。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。