1.本发明涉及人为干扰指数构建方法技术领域,具体地说是一种基于像素单元的人为干扰指数构建方法。
背景技术:
2.人类活动被认为是20世纪中叶以来全球生态系统退化的主要因素,经济发展、人口增长加剧了人类对自然资源的侵占和破坏。近年来,城市扩张、农业开垦、围海造田等人类活动深刻影响着地表景观格局和生态环境。定量评估人为干扰强度,探究人为干扰对景观格局、生态系统健康等的影响对保护生态环境,促进区域可持续发展具有重要意义。
3.目前,人为干扰指数主要以行政区划或针对研究区划分的格网为基本单元,利用行政区划内的人口密度、土地转换、可达性、电力基础设施等地理要素构建人为干扰指数,或者针对格网单元内不同土地利用类型的干扰系数和所占面积加权融合建立人为干扰指数,基本单元分辨率过低,对单元内部的干扰差异考虑不足,同时忽略了地物对邻近区域的干扰影响。
4.因此,需要设计一种基于像素单元的人为干扰指数构建方法,能够改善由于基本单元区域过大,单元内不同土地利用类型间干扰被中和导致均质化的问题,同时考虑了同一地表类型在不同位置的生态差异以及线状地物对邻近区域的干扰影响,增强人为干扰的空间差异,提高人为干扰估算的准确性。
技术实现要素:
5.本发明的目的是克服现有技术的不足,提供了一种基于像素单元的人为干扰指数构建方法,能够改善由于基本单元区域过大,单元内不同土地利用类型间干扰被中和导致均质化的问题,同时考虑了同一地表类型在不同位置的生态差异以及线状地物对邻近区域的干扰影响,增强人为干扰的空间差异,提高人为干扰估算的准确性。
6.为了达到上述目的,本发明提供一种基于像素单元的人为干扰指数构建方法,包括以下步骤:
7.s1:基于像素单元的土地利用干扰系数构建;
8.s2:地表生态状况指标构建;
9.s3:道路邻近干扰指标构建;
10.s4:层次分析法加权融合构建人为干扰指数;
11.所述s1具体包括:
12.s10:对遥感影像数据进行预处理,包括辐射定标和大气校正;
13.s11:根据研究区特点,建立土地利用分类体系,提取光谱特征、指数特征、纹理特征等并利用support vector machines(svm)分类器提取土地利用信息;
14.s12:根据土地利用类型受人为干扰程度确定土地利用干扰系数,并赋值计算获得土地利用干扰系数指标ic;
15.s2具体包括:
16.s20:在遥感数据预处理的基础上,计算归一化植被指数(normalized difference vegetation index,ndvi),同时利用缨帽变换计算湿度分量(wetness);
17.s21:采用均值加权的方法融合ndvi和wetness获得地表生态状况指标ev;
18.s3具体包括:
19.利用open street map(osm)提供的道路数据,按照道路承载力和人为干扰程度对道路划分等级,根据道路等级生成距离不同的缓冲区,并以多层缓冲区表示同一道路不同范围内的干扰差异,对各层缓冲区赋值计算获得道路邻近干扰指标biv;
20.s4具体包括:
21.s40:将所述s12、s21和s3所有指标数值归一化到0-1范围内,使所述所有指标在同一量纲标准下发挥作用;
22.s41:根据所述s10~s12中获得的各指标的相对重要程度,构建判断矩阵,计算各指标对应权重;
23.s42:将所述s40指标归一化和s41的权重基础上对人为干扰的正负影响,加权融合获得人为干扰指数hdi。
24.ndvi的定义为:
[0025][0026]
其中,nir是近红外波段,red是红光波段;
[0027]
wetness的定义为:
[0028]
wetness=0.0315ρ1 0.2021ρ2 0.3102ρ3 0.1594ρ
4-0.6806ρ
5-0.6109ρ7[0029]
其中,wetness为湿度分量,ρi(i=1,2,
…
,5,7)为landsat tm影像各波段的反射率。
[0030]
ev定义为:
[0031]
ev=(ndvi wetness)/2
[0032]
其中,ev为地表生态状况指标,ndvi为归一化植被指数,wetness为湿度分量。
[0033]
s40中的归一化定义为:
[0034][0035]
其中x为指标归一化结果,xi为指标像素值,x
min
为指标最小值,x
max
为该指标最大值。
[0036]
hdi的定义为:
[0037]
hdi=ic
×
w1 biv
×
w2 (1-ev)
×
w3[0038]
其中,hdi为人为干扰指数,ic为土地利用干扰系数,biv为道路邻近干扰指数,ev为地表生态状况,wi(i=1,2,3)为各指标权重。
[0039]
本发明与现有技术相比,充分利用像素这一图像最小单元作为人为干扰指数的构建单元,避免面积过大的单元内部不同土地利用类型的人为干扰均质化现象,同时考虑了相同土地利用类型在不同区域的人为干扰差异以及道路等线状地物对周围邻近区域的干扰影响,从而增强复杂生态环境下的人为干扰空间异质性,提高人为干扰指数估算的准确
性。
附图说明
[0040]
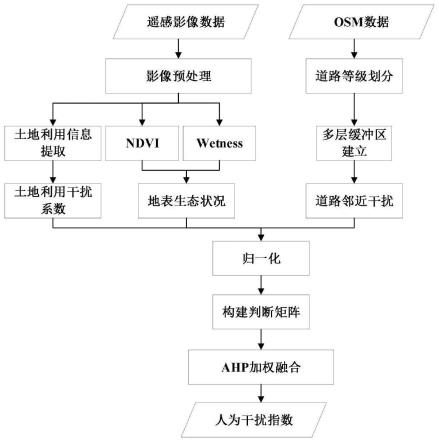
图1为本发明基于像素单元的人为干扰指数构建技术流程图;
[0041]
图2为本发明土地利用干扰系数构建流程图;
[0042]
图3为本发明人为干扰指数结果示意图;
[0043]
图4为本发明土地利用类型干扰系数示意图。
具体实施方式
[0044]
现结合附图对本发明做进一步描述。
[0045]
如图1~图4,本发明提供一种基于像素单元的人为干扰指数构建方法,包括以下步骤:
[0046]
s1:基于像素单元的土地利用干扰系数构建;
[0047]
s2:地表生态状况指标构建;
[0048]
s3:道路邻近干扰指标构建;
[0049]
s4:层次分析法加权融合构建人为干扰指数;
[0050]
所述s1具体包括:
[0051]
s10:对遥感影像数据进行预处理,包括辐射定标和大气校正;
[0052]
s11:根据研究区特点,建立土地利用分类体系,提取光谱特征、指数特征、纹理特征等并利用support vector machines(svm)分类器提取土地利用信息;
[0053]
s12:根据土地利用类型受人为干扰程度确定土地利用干扰系数,并赋值计算获得土地利用干扰系数指标ic;
[0054]
s2具体包括:
[0055]
s20:在遥感数据预处理的基础上,计算归一化植被指数(normalized difference vegetation index,ndvi),同时利用缨帽变换计算湿度分量(wetness);
[0056]
s21:采用均值加权的方法融合ndvi和wetness获得地表生态状况指标ev;
[0057]
s3具体包括:
[0058]
利用open street map(osm)提供的道路数据,按照道路承载力和人为干扰程度对道路划分等级,根据道路等级生成距离不同的缓冲区,并以多层缓冲区表示同一道路不同范围内的干扰差异,对各层缓冲区赋值计算获得道路邻近干扰指标biv;
[0059]
s4具体包括:
[0060]
s40:将所述s12、s21和s3所有指标数值归一化到0-1范围内,使所述所有指标在同一量纲标准下发挥作用;
[0061]
s41:根据所述s10~s12中获得的各指标的相对重要程度,构建判断矩阵,计算各指标对应权重;
[0062]
s42:将所述s40指标归一化和s41的权重基础上对人为干扰的正负影响,加权融合获得人为干扰指数hdi。
[0063]
ndvi的定义为:
[0064][0065]
其中,nir是近红外波段,red是红光波段;
[0066]
wetness的定义为:
[0067]
wetness=0.0315ρ1 0.2021ρ2 0.3102ρ3 0.1594ρ
4-0.6806ρ
5-0.6109ρ7[0068]
其中,wetness为湿度分量,ρi(i=1,2,
…
,5,7)为landsat tm影像各波段的反射率。
[0069]
ev定义为:
[0070]
ev=(ndvi wetness)/2
[0071]
其中,ev为地表生态状况指标,ndvi为归一化植被指数,wetness为湿度分量。
[0072]
s40中的归一化定义为:
[0073][0074]
其中x为指标归一化结果,xi为指标像素值,x
min
为指标最小值,x
max
为该指标最大值。
[0075]
hdi的定义为:
[0076]
hdi=ic
×
w1 biv
×
w2 (1-ev)
×
w3[0077]
其中,hdi为人为干扰指数,ic为土地利用干扰系数,biv为道路邻近干扰指数,ev为地表生态状况,wi(i=1,2,3)为各指标权重。
[0078]
实施例:
[0079]
本发明基于土地利用提取结果,以像素为基本单元,计算各像素的干扰系数和生态状况,突出体现复杂地表环境下的人为干扰空间异质性,同时考虑了线状地物对邻近区域的干扰影响,提高了人为干扰估算的准确性,方法流程如图1所示。
[0080]
人为干扰指数可以通过土地利用干扰系数表示,但现有的方法中大都以格网或行政区划为基本单元,以单元内土地利用类型的面积和干扰系数加权融合表示该单元的人为干扰程度,该方法容易忽略单元内部不同土地利用类型的人为干扰差异。
[0081]
本发明采用像素为基本单元,通过赋值计算获得土地利用干扰系数表示人为干扰程度,基于像素单元的干扰系数技术流程如图2所示。
[0082]
对于遥感影像(主要针对中高等分辨率影像)进行辐射定标,即将遥感影像dn值转换为地面反射率,同时利用flaash大气校正模型消除大气对地表反射率的影响。本实例中,利用envi软件辐射定标工具进行定标,获取地表反射率;利用flaash大气校正工具进行校正,获取消除大气影响的地表反射率数据。
[0083]
根据研究区特点确定合适的分类体系,在大气校正后的遥感影像上提取分类特征,并进行土地利用分类提取土地利用信息。本实例中,针对黄河三角洲研究区特点,确立了河流、潮水、海滩、草甸、未利用地、生态栖息岛、耕地、库塘、养殖池、盐田、建设用地和工矿用地共12类土地利用类型,提取了光谱特征、植被指数特征、纹理特征,并利用svm分类器提取土地利用信息。
[0084]
根据各土地利用类型的人为干扰程度和生态状况确定干扰系数,赋值计算得到干扰系数指标ic,本实例中的ic如图4所示。
[0085]
相同的景观类型在不同位置上可能受到的人为干扰程度有所差异,如草甸在有些区域人为干扰少长势旺盛,有些区域受人为踩踏、破坏等生长状况较差,仅通过土地利用干扰系数表示人为干扰容易忽略这种差异。水体和植被状况与区域生态环境密切相关,因此利用归一化植被指数ndvi和湿度分量wetness构建地表生态状况指标ev。
[0086]
归一化植被指数ndvi与植被生物量、植被盖度等密切相关,可以表示植被的生态状况,其定义为:
[0087][0088]
其中,nir是近红外波段,red是红光波段。同时,引入缨帽变换的wetness分量表示水体、土壤和植被的湿度,其定义为:
[0089]
wetness=0.0315ρ1 0.2021ρ2 0.3102ρ3 0.1594ρ
4-0.6806ρ
5-0.6109ρ7[0090]
其中,wetness为湿度分量,ρi(i=1,2,
…
,5,7)为landsat tm影像各波段的反射率。
[0091]
地表综合生态状况可以通过wetness与ndvi均值加权融合获得,其定义为:
[0092]
ev=(ndvi wetness)/2
[0093]
其中,ev为地表生态状况指标,ndvi为归一化植被指数,wetness为湿度分量。
[0094]
景观不仅对于自身所占据的区域有干扰影响,对周围邻近区域也有影响。考虑到面状地物对自身产生的干扰影响远高于对邻近区域的影响,而线状地物,如道路、堤坝等由于自身呈长条形面积较小,对周围区域产生的影响可能较大。本发明根据道路等级建立距离不同的多层缓冲区,并赋值计算构建道路邻近干扰指标biv。
[0095]
将道路按照承载力和人为干扰程度划分等级,各等级道路对周围区域影响的差异通过缓冲区距离实现,即道路承载力越高,对周围影响的距离越远。同一道路对不同范围内的干扰差异通过多层缓冲区实现,并对各层缓冲区赋值,距离道路中心越远,赋值获得的干扰程度越低。本实例中道路共划分为8个等级,不同等级道路第一层缓冲区距离间隔为5m,第1等级道路干扰程度最高,第一层缓冲区距离为50m,第8等级道路第一层缓冲区距离为15m。所有等级道路均设置4层缓冲区,第2-4层缓冲区距离分别是第一层的2-4倍。各层缓冲区邻近干扰值分别设置为0.8,0.6,0.4,0.2,赋值计算得到道路邻近干扰指标biv。
[0096]
综合考虑土地利用干扰系数ic、地表生态状况ev和道路邻近干扰biv能够全面体现区域内人为干扰,尤其是在复杂地理环境下突出人为干扰空间异质性,利用层次分析法加权融合构建人为干扰指数。
[0097]
指标间的量纲不同,数值相差较大,若直接加权融合会导致某一指标产生主导作用或某些数值较小的指标失去效应,因此对各指标进行归一化,使所有指标在同一量纲标准下发挥作用。其定义为:
[0098][0099]
其中x为指标归一化结果,xi为指标像素值,x
min
为指标最小值,x
max
为该指标最大值。
[0100]
指标间的相对重要程度决定了指标的权重,针对s10得到的土地利用干扰系数、s11得到的地表生态状况和s12得到的道路邻近干扰指标构建判断矩阵,确定指标权重wi。
[0101]
各指标与人为干扰的相关性不同,地表生态状况ev与人为干扰呈现负相关,地表生态状况越差表示人为干扰越强,因此在加权融合时考虑指标的正负效应。人为干扰指数定义为:
[0102]
hdi=ic
×
w1 biv
×
w2 (1-ev)
×
w3[0103]
其中,hdi为人为干扰指数,ic为土地利用干扰系数,biv为道路邻近干扰指数,ev为地表生态状况,wi(i=1,2,3)为各指标权重。
[0104]
本实施例中得到的人为干扰指数结果如图3所示。可以看出本发明提出的方法有效的增强了人为干扰的空间异质性。尤其是图中红框区域,为黄河三角洲的孤东油田,由于油井所占面积较小,油井周围大多种植芦苇等湿地植被改善区域生态状况,图中可以发现油井与周围区域人为干扰差异明显不同。
[0105]
以上仅是本发明的优选实施方式,只是用于帮助理解本技术的方法及其核心思想,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
[0106]
本发明从整体上解决了现有技术中在复杂地表的空间单元内人为干扰被均质化、忽略景观对邻近区域干扰影响的现象,显著增强了人为干扰指数的空间差异性,提高了人为干扰估算的准确性,适用于湿地等复杂的生态环境,为评估人类活动对景观和生态的影响、保护湿地资源、促进区域可持续发展等提供数据支撑。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。