技术特征:
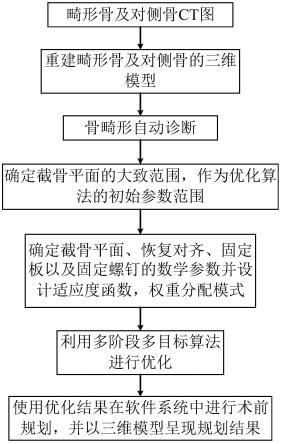
1.一种3d截骨矫形术前智能规划方法,其特征在于,包括以下步骤:s1、利用畸形骨和对侧健康骨的ct数据,生成畸形骨和对侧健康骨的stl模型,并导入3d截骨矫形术前智能规划系统,利用选取参考面进行坐标对称的方法生成对侧健康骨的镜像模型,将所述镜像模型作为重建目标模型,并对畸形骨模型和所述重建目标模型建立局部坐标系;s2、通过所述3d截骨矫形术前智能规划系统的模型空间变化模块对所述畸形骨模型和重建目标模型的初始位姿进行调整;并在所述畸形骨模型和所述重建目标模型的远端关节选取地标点并搜索领域点集;s3、通过所述3d截骨矫形术前智能规划系统的模型配准模块,利用所述s2中搜索领域点集进行基于地标点的初次配准,并选取所述畸形骨模型和重建目标模型远端30%的点集,进行二次精确配准;s4、在所述s3精确配准基础上,通过骨畸形自动诊断模块生成畸形骨模型的畸形函数图像,并确定畸形骨的畸形区域以及能切割范围;s5、通过所述s4得到的能切割范围,使用模型切割模块对畸形骨进行切割;s6、以切割范围生成的截骨平面的参数范围作为优化算法的初始输入,通过截骨矫形优化模块中基于权重的多阶段多目标优化算法计算最优的术前规划参数;s7、以所述s6的优化结果,通过所述3d截骨矫形术前智能规划系统进行术前规划,以3d形式呈现规划结果,并通过骨组织填充模块进行截骨后的间隙填充。2.根据权利要求1所述的一种3d截骨矫形术前智能规划方法,其特征在于:所述对侧健康骨的镜像模型的生成是以所述对侧健康骨在坐标系统中的点坐标,以xoz平面为对称面求取对称点坐标,利用所述对称点坐标建立镜像模型的几何结构和拓扑结构。3.根据权利要求1所述的一种3d截骨矫形术前智能规划方法,其特征在于,所述s1中,局部坐标系的构建方法为:s101、以骨长轴为基准建立局部坐标系的y轴,绕y轴旋转对应于纠正横平面;s102、以绕z轴旋转对应于纠正矢状面为原则,借助已建立的y轴,建立局部坐标系的z轴;s103、以绕x轴旋转对应于纠正额平面为原则,并通过已建立的y轴和z轴的向量积结果,建立局部坐标系的x轴。4.根据权利要求1所述的一种3d截骨矫形术前智能规划方法,其特征在于:所述s2中,远端关节的解剖点为七个地标点,并在每一个所述解剖点的50mm领域内利用建立的拓扑结构关系搜寻五十个点,使用广度优先搜索算法,最后生成所述畸形骨模型和重建目标模型进行待配准点集和目标点集。5.根据权利要求4所述的一种3d截骨矫形术前智能规划方法,其特征在于:所述畸形骨模型的拓扑结构关系是通过stl模型已有的点、面单元数据,根据一个点参与组成的所有面单元构成所述点的所有邻接面单元、一个点参与组成的所有线单元构成所述点的所有邻接线单元、线单元相邻有一个或两个面单元以及面单元相邻有一个、两个或三个面单元的原则,建立所述3d截骨矫形术前智能规划系统中的三维模型拓扑结构关系。6.根据权利要求1所述的一种3d截骨矫形术前智能规划方法,其特征在于:所述s3中,两次精确配准均使用最近迭代点法进行配准,第一次精确配准是选取关节附近解剖点作为
地标点进行的初次粗略配准;第二次精确配准是选取已粗略配准的远端部分点集进行精确配准。7.根据权利要求1所述的一种3d截骨矫形术前智能规划方法,其特征在于,所述s4中,畸形骨的畸形区域的自动诊断方法包括:s401、建立窗函数,沿着所述畸形骨模型的局部坐标系y轴将远端配准的畸形模型和重建目标模型的点集进行空间离散处理;s402、每一块离散部分中包含有所述畸形骨模型和重建目标模型的点集,计算并搜寻畸形骨模型点集中每一点与重建目标模型点集中欧氏距离最小的点,并计算均方根误差rmse;s403、以畸形骨模型局部坐标系y轴上的点为横坐标,均方根误差为纵坐标,建立畸形函数图像,以偏离均方根误差最小值10%确定畸形区域。8.根据权利要求7所述的一种3d截骨矫形术前智能规划方法,其特征在于:所述窗函数是以局部坐标系为参考,x值和y值包围畸形骨模型和健康骨模型,y值为离散的范围。9.根据权利要求1所述的一种3d截骨矫形术前智能规划方法,其特征在于:所述s6中,优化算法中的参数是根据截骨矫形手术中的临床目标转化的,四个所述临床目标的所有参数编码进多阶段多目标优化算法的染色体中;基于权重的多阶段多目标优化算法中,权重分配是将普通多目标优化算法中拥挤度的计算方式进行改变,在拥挤度计算时根据当前优化目标的重要性进行权重分配,使优化后的参数强制保留在靠近拥挤度更小的理想点空间中;基于权重的多阶段多目标优化算法中的多阶段是将四个优化目标分为两个阶段,将阶段一的优化结果用来初始化阶段二,最后根据所述阶段二的优化结果的参数进行术前规划。10.一种3d截骨矫形术前智能规划系统,其特征在于,用于实现如权利要求1至9任一所述的3d截骨矫形术前智能规划方法,以及模型空间变换模块,用于在智能规划前对骨骼模型的空间位置进行调整;模型配准模块,此模块提供基于地标、最近迭代点icp、四点配准及快速点特征直方图配准方法,用于根据不同情况将畸形骨模型的局部或整体与重建目标模型进行配准;骨畸形自动诊断模块,用于自动计算出畸形骨模型相比较于重建目标模型的畸形范围并绘制畸形函数图像;模型切割模块,用于在配准及自动诊断后在一个粗略范围内对畸形骨进行切割。骨填充模型生成模块,用于生成截骨复原后产生的骨碎片间隙填充模型,进行骨碎片辅助固定。截骨矫形优化模块,用于在截骨平面的参数范围内,产生不同的近端、远端潜在骨碎片作为输入,使用基于权重的多阶段多目标优化算法计算出最优的截骨切割面、复原对齐变换矩阵,固定板及螺钉的空间位置。
技术总结
本发明提供一种3D截骨矫形术前智能规划方法和系统,根据骨骼畸形模型建立局部坐标系,使用模型配准模块完成骨骼远端的局部配准,利用空间范围窗体函数绘制畸形骨模型相较于重建目标模型的畸形函数图像,并大致确定畸形骨的畸形范围,完成骨畸形的自动诊断;确定骨畸形自动诊断的目的是为临床目标的多阶段多目标优化确定一个截骨平面的大致范围,不同的截骨平面会生成不同的骨碎片,产生的截骨矫形方案也不同,因此骨畸形自动诊断确定截骨平面大致范围为多阶段多目标优化提供参数范围基础。基础。基础。
技术研发人员:石志良 廖诗旗 祝少博 朱佳佳 汪鹏程
受保护的技术使用者:武汉理工大学
技术研发日:2022.07.21
技术公布日:2022/10/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。