1.本技术涉及通信领域,尤其涉及一种用于紧急脱险的技术。
背景技术:
2.诊脉是中医四诊中重要的一部分。诊脉是通过按触人体不同部位的脉搏,以体察脉象变化的切诊,临床上主要掌握诊脉的时间、病人的体位,医生的指法和指力轻重,每次诊脉时间等,以每侧脉搏跳动不少于50次为限,同时要了解健康人脉象的变化情况,才能正确地进行脉诊。随着科技的发展,我们可以通过智能机械实现自动化诊脉,但是机械总会有偶发故障,容易对人身造成危险。
技术实现要素:
3.本技术的一个目的是提供一种紧急脱险装置。
4.根据本技术的一个方面,提供了一种紧急脱险装置,其特征在于,应用于诊脉设备,所述诊脉设备包括支撑柱体、带有脉搏传感器的采集单元,所述紧急脱险装置设置于所述诊脉设备的内部、处于所述采集单元下方,其中,所述紧急脱险装置包括:
5.腕托单元,所述腕托单元用于承载用户手腕,使所述采集单元采集所述用户手腕上的脉搏信号;
6.连接于所述腕托单元底部的支撑单元,所述支撑单元用于调节所述腕托单元的高度;
7.作用于所述支撑单元的压力杆,通过所述压力杆获取外部压力,并通过所述外部压力调节所述压力杆作用于所述支撑单元的作用力,从而调整所述腕托单元的高度;
8.固定于所述诊脉设备底部的底板,所述底板与所述支撑单元及所述压力杆相连接。
9.在一些实施例中,所述支撑单元的结构包括x支撑结构。
10.在一些实施例中,所述x支撑结构包括转动连连接于所述底板的底部支撑杆,及滑动连接于所述底板并与所述压力杆相互作用的压力支撑杆,所述底部支撑杆与所述压力支撑杆的另一端连接于所述腕托单元底部。
11.在一些实施例中,所述底部支撑杆与所述腕托单元底部为滑动连接,所述压力支撑杆与所述腕托单元底部为转动连接。
12.在一些实施例中,所述压力杆用于支撑所述压力支撑杆与所述底板的滑动连接部位的滑动芯子,使所述滑动芯子处于支撑滑动位置。
13.在一些实施例中,所述压力杆中部转动连接于所述诊脉设备底部,并在两侧分别与所述诊脉设备弹性连接。
14.在一些实施例中,所述压力杆的承载侧通过第一弹性单元连接于所述底板,所述第一弹性单元处于拉伸状态。
15.在一些实施例中,所述压力杆的压力侧通过第二弹性单元连接于所述底板,所述
第二弹性单元处于压缩状态。
16.在一些实施例中,所述压力杆的压力侧用于获取外部压力,通过所述外部压力转动所述压力杆以抬起所述承载侧,断开所述承载侧与所述滑动芯子连接使所述滑动芯子从所述支撑滑动位置滑动至释放滑动位置,从而降低腕托单元的高度。
17.在一些实施例中,所述装置还包括微动单元,所述微动单元的顶部设置有弹性垫片,用于在所述腕托单元降低高度的过程中进行弹性缓冲并承载所述腕托单元。
18.在一些实施例中,所述压力杆的第一弹性单元及第二弹性单元用于在所述腕托单元被拉起时将所述压力杆恢复至初始位置,以支撑所述滑动芯子,从而使得所述腕托单元被拉起后恢复至原始位置。
19.与现有技术相比,本技术提供了一种紧急脱险装置,应用于诊脉设备,所述诊脉设备包括支撑柱体、带有脉搏传感器的采集单元,所述紧急脱险装置设置于所述诊脉设备的内部、处于所述采集单元下方,其中,所述紧急脱险装置包括:腕托单元,所述腕托单元用于承载用户手腕,使所述采集单元采集所述用户手腕上的脉搏信号;连接于所述腕托单元底部的支撑单元,所述支撑单元用于调节所述腕托单元的高度;作用于所述支撑单元的压力杆,通过所述压力杆获取外部压力,并通过所述外部压力调节所述压力杆作用于所述支撑单元的作用力,从而调整所述腕托单元的高度;固定于所述诊脉设备底部的底板,所述底板与所述支撑单元及所述压力杆相连接。本技术能够在诊脉设备故障时,通过外部压力降低腕托单元的高度,从而释放出用户的手腕,防止用户在诊脉故障时被诊脉设备卡住或者其他影响造成用户身体伤害,为用户提供了良好的安全保障。
附图说明
20.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
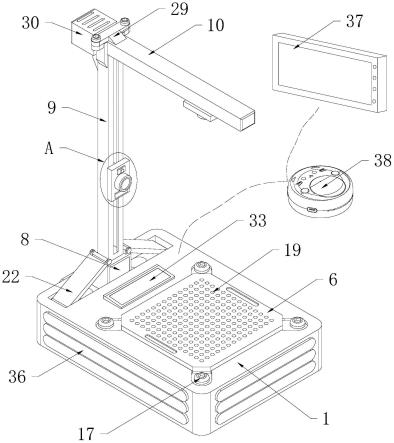
21.图1示出根据本技术一个实施例的一种诊脉设备的结构图;
22.图2示出根据本技术一个实施例的一种紧急脱险装置的示例图;
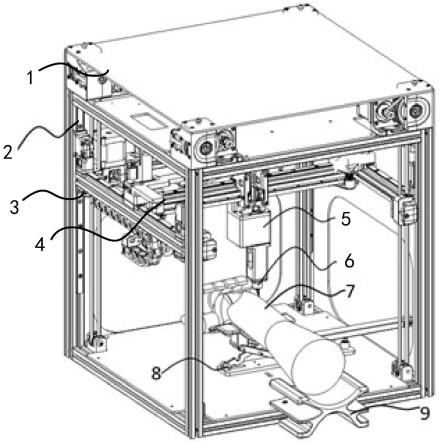
23.图3示出根据本技术另一个实施例的一种紧急脱险装置的示例图;
24.附图中相同或相似的附图标记代表相同或相似的部件。
25.附图标记
[0026]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支撑框架
[0027]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一传动杆
[0028]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二传功杆
[0029]4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三传动杆
[0030]5ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
采集单元
[0031]6ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
脉搏传感器
[0032]7ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
用户手臂
[0033]8ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
脱险装置
[0034]
801
ꢀꢀꢀꢀꢀꢀꢀꢀ
腕托单元
[0035]
802
ꢀꢀꢀꢀꢀꢀꢀꢀ
支撑单元
[0036]
803
ꢀꢀꢀꢀꢀꢀꢀꢀ
压力杆
[0037]
804
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一弹性单元
[0038]
805
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二弹性单元
[0039]
806
ꢀꢀꢀꢀꢀꢀꢀꢀ
微动单元
[0040]9ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
臂托单元
具体实施方式
[0041]
下面结合附图对本技术作进一步详细描述。
[0042]
在本技术的描述中,需要理解的是,术语“中心”“纵向”“横向”“长度”“宽度”“厚度”“上”“下”“前”“后”“左”“右”“竖直”“水平”“顶”“底”“内”“外”“顺时针”“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0043]
此外,术语“第一”“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”“第二”等的特征可以明示或者隐含地包括一个或者更多该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0044]
在本技术中,除非另有明确的规定和限定,术语“安装”“相连”“连接”“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
[0045]
在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”“下方”和“下面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度小于第二特征。
[0046]
在本技术的描述中,“多个”的含义是两个或者更多,除非另有明确具体的限定。
[0047]
本技术提供了一种紧急脱险装置,参考图1,该紧急脱险装置应用于诊脉设备,对应诊脉设备包括:支撑框架1、带有脉搏传感器6的采集单元5;该紧急脱险装置设置于诊脉设备的内部、处于所述采集单元下方,其中,如图2、图3所示,所述紧急脱险装置包括:腕托单元801,所述腕托单元801用于承载用户手腕,使所述采集单元采集所述用户手腕上的脉搏信号;连接于所述腕托单元底部的支撑单元802,所述支撑单元802用于调节所述腕托单元的高度;作用于所述支撑单元的压力杆803,通过所述压力杆获取外部压力,并通过所述外部压力调节所述压力杆作用于所述支撑单元802的作用力,从而调整所述腕托单元801的高度;固定于所述诊脉设备底部的底板(未示出),所述底板与所述支撑单元802及所述压力杆803相连接。
[0048]
具体地,腕托单元801,所述腕托单元801用于承载用户手腕,使所述采集单元采集所述用户手腕上的脉搏信号。其中,所述腕托单元通过适配于用户手臂的人体结构的凹槽
放置用户的手腕,在一些情形下,所述诊脉设备还包括臂托单元9,通过适配于用户手臂的人体结构的凹槽放置用户手臂,该臂托单元和腕托单元一起承载用户手臂7,使用户手臂能够平稳的放置于诊脉设备中,提高用户诊脉舒服度的同时,能够保证采集单元采集到的脉搏数据的数据质量。其中,所述腕托单元801处于用户手臂7的下方,所述用户手臂7处于对应采集装置5的下方,换言之,用户手臂7处于腕托单元801和采集装置5的中间,当诊脉设备处于采集状态时,对应采集装置5通过脉搏传感器6作用于用户手臂7,用户手臂7被固定于该脉搏传感器6与腕托单元801之间。所述采集装置5可以是通过手动调节对应机械装置的位置,从而调节采集装置5的空间位置信息,还可以是诊脉装置的控制中心通过电机控制对应传动装置调节采集装置5的空间位置等。
[0049]
例如,在诊脉过程中,用户将手腕伸到所述支撑框架1内,诊脉设备还包括摄像单元(未示出)和主控单元(未示出),通过摄像单元拍摄用户手腕,得到目标图像信息,主控单元根据所述目标图像信息确定脉搏点的水平位置,并向对应驱动单元发送控制指令,以控制采集单元5上、下、前、后、左、右移动,将采集单元的脉搏传感器定位到用户手腕的脉搏点采集脉搏信号。在一些实施例中,所述摄像单元通过连接杆设置于所述支撑框架1的内部。在一些实施例中,所述摄像单元包括但不限于深度相机、普通相机、摄像头等摄像设备。
[0050]
其中,所述第一传动杆用于供对应垂直驱动模块(未示出)进行垂直方向上的传动控制,所述第二传动杆、第三传动杆用于供对应水平驱动模块(未示出)进行水平方向上的传动控制,对应驱动模块包括通过传送带、点击以及传送杆实现特定方向位移调节的装置。所述主控单元包括水平控制模块(未示出)、垂直控制模块(未示出),所述水平控制模块与所述水平驱动单元电连接,所述垂直控制模块与所述垂直驱动单元电连接;所述水平控制模块用于根据所述脉搏点在所述目标图像信息中的目标坐标信息确定所述水平驱动单元的水平位移信息,以根据所述水平位移信息向所述水平驱动组件发送第一控制指令,将所述采集单元定位到所述脉搏点的正上方;所述垂直控制模块用于根据所述垂直距离信息向所述垂直驱动单元发送第二控制指令,以控制所述垂直驱动单元将所述脉搏压力传感器垂直定位到所述脉搏点。在一些实施例中,所述目标坐标信息包括所述脉搏点在所述目标图像信息中的位置坐标,例如,(xa,ya)。例如,以所述目标图像信息的两相邻边作为x轴,y轴,确定所述用户手腕的脉搏点在所述目标图像信息中的目标坐标信息。再例如,以所述目标图像信息的中心点为坐标原点,以经过所述坐标原点的水平线为x轴,以经过所述坐标原点的垂直线为y轴,确定所述脉搏点在所述目标图像信息中的目标坐标信息。在此,若无特别说明,本技术所述的“x(即小写x)”“y(即小写y)”表示图像坐标信息(例如,脉搏点、第一参考点、第二参考点等在其对应的图像信息中的坐标信息)。进一步地,所述水平控制模块根据所述目标坐标信息确定所述水平驱动单元对应的水平位移信息。在一些实施例中,可以通过预设多个图像坐标信息与水平位移信息之间的映射关系的方式确定所述目标坐标信息对应的水平位移信息。例如,可预先确定三维坐标系:以所述摄像单元为坐标原点,以平行于水平面向右方向为x轴正向,以平行于水平面向上方向为y轴正向,以垂直于水平面向上的方向为z轴正向,所述水平位移信息包括所述采集单元在所述三维坐标系的x、y轴的坐标信息。在此,若无特别说明,本技术所述的“x(即小写x)”“y(即小写y)”表示物理三维坐标信息(例如,可预先确定三维坐标系:以所述摄像单元为坐标原点,以平行于水平面向右方向为x轴正向,以平行于水平面向上方向为y轴正向,以垂直于水平面向上的方向为z轴正
向)。通过大量实验获取通过所述摄像单元拍摄获取的图像信息中各坐标点所对应的物理坐标位置(例如,在所述图像信息中的坐标信息(xi,yi)对应物理坐标(xj,yj)),根据所述目标图像信息中所拍摄的脉搏点的目标坐标信息直接获取对应的物理坐标位置,并将该物理坐标位置确定为所述水平位移信息(例如,(xj,yj))。在一些实施例中,所述水平位移信息包括移动方向(例如,x轴方向、y轴方向),所述水平控制模块还需要再借助于第一参考点确定所述水平位移信息。在另一些实施例中,所述水平移动信息包括移动方向以及在该移动方向上的移动距离信息(例如,x轴方向移动5cm,y轴方向移动5cm),所述水平控制模块还需要再借助于位移映射关系确定所述水平位移信息。关于后两种用于确定所述水平位移信息的具体介绍请参见后面的实施例,在此不做赘述。在一些实施例中,通过所述垂直驱动单元驱动所述脉搏压力传感器在垂直方向上的移动,所述垂直控制模块根据所述垂直距离信息(例如zb)向所述垂直驱动单元发送第二控制指令,以控制所述脉搏压力传感器在垂直方向上移动的zb距离,从而将该脉搏压力传感器定位到所述用户手腕的脉搏点上。
[0051]
在一些实施例中,所述诊脉设备还包括通信模块,所述主控单元与所述通信模块电连接,通过所述通信模块与对应的网络设备或用户设备进行通信连接。例如,通过所述通信模块将相关数据(例如,所述脉搏信号、诊脉信息、波形图等信息)发送给所述网络设备或者用户设备,通过所述网络设备下发给对应的用户设备,或者直接发送给所述用户设备,通过用户设备直接呈现给目标用户(例如,医生等目标用户),或者通过用户设备进行对相关数据的处理,生成诊脉信息或波形图。在一些实施例中,所述用户设备包括但不限于电脑、手机、平板电脑等计算设备。在一些实施例中,所述诊脉信息包括但不限于脉搏跳动频率等信息。
[0052]
在一些实施例中,所述紧急脱险装置包括连接于所述腕托单元底部的支撑单元802,所述支撑单元802用于调节所述腕托单元的高度。例如,对应支撑单元包括用于进行长期停放或者短期工作需要进行承载的单元,例如,千斤顶、三点支撑或者x型结构支撑等。所述支撑单元为高度可调节的支撑单元,通过相应控制手段可以实现对该支撑单元的支撑高度进行调节,相应地,该支撑单元用于承载腕托单元,该腕托单元的高度随着支撑单元的支撑高度的变化而变化。
[0053]
在一些实施例中,所述支撑单元的机构包括x支撑结构。例如,所述x支撑结构便于进行高度调节,可以通过较小的滑动位移实现一定量的高度调节。所述支撑单元采用双侧x支撑结构,在该腕托单元与底板的两端均采用两个支撑杆组成相同的x支撑结构,实现对腕托单元的高度调节,其中,x支撑结构的两个支撑杆在中间通过穿孔螺栓的形式连接。在一些实施例中,所述x支撑结构包括转动连连接于所述底板的底部支撑杆,及滑动连接于所述底板并与所述压力杆相互作用的压力支撑杆,所述底部支撑杆与所述压力支撑杆的另一端连接于所述腕托单元底部。例如,如图2所示,对应x支撑结构包括两个支撑杆,两个支撑杆均与底板、腕托单元的底部相连。为了使得x支撑结构实现高度调节,该x支撑结构应该具备形变能力,对应的支撑杆中存在一个可以一端滑动的压力支撑杆,该压力支撑杆与底板滑动连接,并与压力杆相互作用,例如,压力支撑杆的末端存在向内侧凸起的滑动芯子,该滑动芯子镶嵌于底板上的滑动凹槽中,且该滑动芯子的长度大于该互动凹槽的深度,从而使得滑动芯子能够延伸出滑动凹槽并受到压力杆的作用力。当滑动芯子处于压力杆的作用下时,该滑动芯子处于支撑滑动位置,对应支撑装置处于支撑状态,从而保证腕托单元的高度
与臂托单元高度相适配,我们可以将腕托单元此时的高度确定为腕托单元的初始高度等。支撑结构中另一个支撑杆与底板转动连接,通过转动螺栓连接于底板的转动凹槽中,从而使得该支撑杆具有角度变化的特性。在一些实施例中,所述底部支撑杆与所述腕托单元底部滑动连接,所述压力支撑杆与所述腕托单元底部为转动连接。例如,如图2所示的支撑单元802,为了保证x支撑结构的形变规律以及提高对应抗压能力等,所述压力支撑杆与腕托单元底部滑动连接,该滑动连接的滑动与前述压力支撑杆的滑动连接类似,通过凸出的滑动芯子嵌入腕托单元底部的直线型凹槽内从而实现对应滑动连接。相应地,压力支撑杆与腕托单元的底部转动连接,该转动连接与前述转动连接类似。当然,本领域技术人员应能理解上述x支撑结构仅为举例,其他现有的或今后可能出现的支撑单元如可适用于本技术,也应包含在本技术保护范围以内,并在此以引用方式包含于此。
[0054]
在一些实施例中,所述紧急脱险装置包括作用于所述支撑单元的压力杆803,通过所述压力杆获取外部压力,并通过所述外部压力调节所述压力杆作用于所述支撑单元802的作用力,从而调整所述腕托单元801的高度;固定于所述诊脉设备底部的底板(未示出),所述底板与所述支撑单元802及所述压力杆803相连接。例如,对应压力杆用于获取外部施加的外力,并基于对应压力降低支撑单元的高度,从而降低腕托单元的高度等,例如,抽出压力杆以释放对应滑动芯子从而降低支撑单元的高度,或者通过杠杆原理压下压力杆的另一端,从而释放滑动芯子作用的一端。所述底板用于连接支撑单元及压力杆,实现该紧急脱险装置的一体化结构,该底板安装于诊脉设备内侧的底部合适位置上,用于实现用户手腕托举的同时,防止诊脉设备故障导致的手臂卡住或者受伤等紧急情况。所述压力杆包括但不限于直线型压力杆、z型压力杆或者曲线型压力杆等。
[0055]
在一些实施例中,所述压力杆用于支撑所述压力支撑杆与所述底板的滑动连接部位的滑动芯子,使所述滑动芯子处于支撑滑动位置。例如,如图2所示,所述支撑滑动位置用于指示该滑动芯子处于滑动凹槽的最里侧,使得支撑单元的高度维持初始高度,相应地,腕托单元的高度处于与臂托单元、采集单元等相适配的初始高度等。在此,我们将腕托单元处于初始高度时,对应压力杆与滑动芯子相互作用时该压力杆的位置称为该压力杆的初始位置,当该压力杆获取到外部压力时,将外部压力作用于压力杆的位置作为对应释放位置等。在一些实施例中,所述压力杆中部转动连接于所述底板,并在两侧分别与所述诊脉设备弹性连接。例如,所述压力杆通过获取外部压力从而抬起与压力支撑杆作用的一端,使得压力支撑杆的滑动芯子能够在直线型滑动凹槽内滑动,从而降低该支撑单元的高度。为了实现更加方便、省力效果,我们采用杠杆原理,将压力杆中部连接于底板,如通过转动螺栓连接于底板,基于该连接部位,我们可以将压力杆分为两侧,一侧为作用于滑动芯子的承载侧,另一侧为获取外部压力作用的压力侧等。当我们压下压力杆的压力侧后,为了便于将该压力杆从释放位置回复至初始位置,我们可以在压力杆的承载侧设置第一弹性单元,和/或在压力杆的压力测设置第二弹性单元等。如图2、图3所示,在一些实施例中,所述压力杆的承载侧通过第一弹性单元连接于所述底板,所述第一弹性单元处于拉伸状态。在一些实施例中,所述压力杆的压力侧通过第二弹性单元连接于所述底板,所述第二弹性单元处于压缩状态。例如,第一弹性单元用于通过弹力材料连接承载侧与底板,该弹性材料如弹簧或者弹力绳等。该第一弹性单元的弹性材料一端与底板通过转动螺栓相连,另一端固定于压力杆的承载侧,且该第一弹性单元在该压力杆处于释放状态时处于拉伸状态,用于向压力杆承
载侧施加一个向下向外的作用力,使该压力杆更容易恢复至初始位置。相应地,第二弹性单元用于通过弹力材料连接压力侧与底板,该弹性材料如弹簧或者弹力绳等。该第二弹性单元的弹性材料一端与底板固定连接,另一端固定于压力杆的压力侧,且该第一弹性单元在该压力杆处于释放状态时处于压缩状态,用于向压力杆承载侧施加一个向上的作用力,使该压力杆更容易恢复至初始位置。
[0056]
在一些实施例中,所述压力杆的压力侧用于获取外部压力,通过所述外部压力转动所述压力杆以抬起所述承载侧,断开所述承载侧与所述滑动芯子连接使所述滑动芯子从所述支撑滑动位置滑动至释放滑动位置,从而降低腕托单元的高度。例如,如图2至图3的状态变化,压力杆的压力测用于获取外部施加的外部压力,并通过该压力转动压力杆挑起承载侧,从而使得承载侧不再卡住滑动芯子,x支撑结构的滑动芯子在腕托单元的重力作用下,向滑动凹槽的外侧滑动,使得x支撑结构向下移动,带动腕托单元降低高度,所述释放滑动位置用于指示该滑动芯子在所述滑动凹槽内滑动的最外侧。
[0057]
在一些实施例中,所述装置还包括微动单元,所述微动单元的顶部设置有弹性垫片,用于在所述腕托单元降低高度的过程中进行弹性缓冲并承载所述腕托单元。例如,所述紧急脱险装置还包括微动单元,用于在腕托单元降低高度过程中进行缓冲,防止腕托单元下降速度过快对下方的支撑结构造成较大压力等,一定程度上延长该紧急脱险装置的使用寿命,同时减少用户手臂感受到的震动幅度,为用户营造良好的诊脉环境。该微动单元具有一定的初始高度,微动单元设置于腕托单元下方,并固定于底板上,该微动单元的顶端设置有弹性垫片,用于在所述腕托单元降低高度的过程中进行弹性缓冲;同时,当腕托单元下降时触及到该微动单元,该微动单元还可以承载该腕托单元,防止微动单元一直下降对下方支撑单元造成损伤等。
[0058]
在一些实施例中,所述压力杆的第一弹性单元及第二弹性单元用于在所述腕托单元被拉起时将所述压力杆恢复至初始位置,以支撑所述滑动芯子,从而使得所述腕托单元被拉起后恢复至初始位置。例如,如图3所示,对应腕托单元也可以收到用户的拉力,从而拉起腕托单元801,使紧急脱险装置恢复图2所示的初始状态,如腕托单元801还用于获取外部施加的外部拉力,并通过该拉力拉起腕托单元801,从而对应滑动芯子从滑动凹槽的最外侧运动到最里侧,对应压力杆在第一弹性单元804和第二弹性单元805的共同作用下,对应承载侧下压卡住滑动芯子,对应压力侧上抬从而恢复至初始位置等,从而保证腕托单元收到拉力后恢复并保持初始高度等。
[0059]
对于本领域技术人员而言,显然本技术不限于上述示范性实施例的细节,而且在不背离本技术的精神或基本特征的情况下,能够以其他的具体形式实现本技术。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本技术的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本技术内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。此外,显然“包括”一词不排除其他单元或步骤,单数不排除复数。装置权利要求中陈述的多个单元或装置也可以由一个单元或装置通过软件或者硬件来实现。第一,第二等词语用来表示名称,而并不表示任何特定的顺序。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。