1.本发明涉及的是一种用于建筑设计制造、机械设计制造等领域的技术,具体是一种空间结构施工图最优投影平面求解及图纸自动生成方法。
背景技术:
2.对于建筑结构,在施工建造过程中需要将设计完成的空间结构,绘制成一整套二维图纸。为保证图纸质量,通常要求绘制的安装图各构件投影重合少,力求图纸结构清晰,图纸布局合理。而对于复杂的建筑空间结构而言,针对自身结构特点,选择最优投影面并合理布局图纸,便是工程制图难点所在。在空间结构迅猛发展的同时,国内在这一领域的计算机辅助设计技术发展相对迟缓。首先,国内结构设计软件自主研发程度较低,大多数软件都基于国外软件基础进行研发,上游受限较大。其次,国内空间设计领域出图依旧比较传统,人工手动出图,耗时耗力,不够自动化智能化。采用计算机辅助出图,虽然提高了工程效率,但对于不同建筑结构的自身结构特点,选择最优的投影平面并以最节约资源的方案进行图纸布局,依然是计算机辅助出图的难点技术。
技术实现要素:
3.本发明针对现有技术无法选择最优投影平面、解决施工图纸中标注文字重合问题,且无法自动生成清晰的施工图纸,出图繁复耗时且不精准的问题,提出一种空间结构施工图最优投影平面求解及图纸自动生成方法,通过最优投影平面求解和自动布置图块,可以对任何复杂的三维结构进行针对性分析,能够计算判定最优投影方案,将三维模型以最优的形式呈现为二维图纸。
4.本发明是通过以下技术方案实现的:
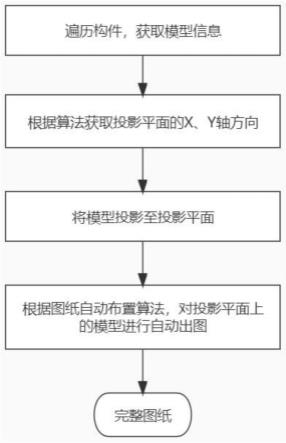
5.本发明涉及一种空间结构施工图最优投影平面求解及图纸自动生成方法,首先遍历所有构件获取结构信息,其次根据投影平面求解方法确定最优的二维投影平面,最后结合投影平面通过图块最优布置方法实现整体结构图纸自动生成。
6.本发明涉及一种实现上述方法的系统,包括:模型遍历模块、投影平面模块、图块集生成模块和绘图区域布置模块,其中:模型遍历模块根据模型已有构件信息,进行构件长度算法处理,得到判断依据,即最小构件尺寸;投影平面模块根据模型信息,进行投影平面算法处理,得到最优投影平面;图块集生成模块根据图块坐标信息,进行图块最优布置算法处理,得到最合理图块集;绘图区域布置模块根据图块和绘图区坐标信息,进行绘图区布置算法处理,实现绘图区图纸自动生成。技术效果
7.本发明通过最优投影平面的算法和图纸自动生成算法,能够实现复杂空间结构施工图纸自动绘制;对于复杂空间结构可提高施工图绘制效率90%以上,通过本技术可获取结构最优投影平面,并保证图纸文字重合率低于5%,完全符合施工图绘制标准要求。
附图说明
8.图1为本发明流程图;
9.图2为最优投影平面确定流程图;
10.图3为投影平面的y轴方向确定流程图;
11.图4为自动布置图块流程图;
12.图5为未使用最优投影平面求解方法的结构安装图;
13.图6为使用最优投影平面求解方法后的结构安装图;
14.图7为未使用自动布置图块方法的图;
15.图8为使用自动布置图块方法后的图;
16.图9为实施例中结构平立面图;
17.图10为实施例中部分结构安装图。
具体实施方式
实施例1
18.如图1所示,为本实施例涉及一种空间结构施工图最优投影平面求解及图纸自动生成方法,通过遍历三维模型并根据投影平面的x轴方向的节点凸包计算二维矩形包围盒后,确定最优的二维投影平面;然后通过图块最优布置算法得到的图块集以迭代更新的方式放置于绘图区域中,实现图纸的自动生成。
19.如图2所示,所述的最优的二维投影平面,通过以下方式得到:
20.步骤1)遍历构件:确定后续判断依据最小构件参数(minmemberreflength):循环所有构件,计算构件尺寸,取出最小构件尺寸*系数,即最小构件参数(minmemberreflength),作为后续判断依据,具体为:构件尺寸=|构件a端坐标-构件b端坐标|,最小构件参数=最小构件尺寸*系数。
21.步骤2)计算所有节点x,y,z坐标的最大差值,节点即为构件两端端点,差值最大的坐标轴方向设置为投影平面的x轴方向mainx,具体为:x坐标最大差值为所有节点x坐标两两相减得到的最大值,y坐标最大差值为所有节点y坐标两两相减得到的最大值,z坐标最大差值为所有节点z坐标两两相减得到的最大值。
22.步骤3)对所有节点投影平面的x轴方向mainx进行投影,任取与投影平面的x轴方向垂直的向量projectionx作为投影后的x轴方向,计算所有投影后节点的凸包,即一个集合中任意有限个点的凸组合的全体。
23.步骤4)投影后节点的二维矩形包围盒绕投影平面的x轴方向mainx旋转,取面积最小的为最终二维包围盒,具体为:计算投影后节点的二维矩形包围盒,设置矩形包围盒两垂直边方向:第一方向d1、第二方向d2,其中第一方向d1初始值为与投影平面的x轴方向垂直的向量projectionx,绕投影平面的x轴方向mainx旋转n次,旋转步长为计算凸包节点在矩形包围盒两垂直边方向第一方向d1、第二方向d2下的二维矩形包围盒,取面积最小的为最终二维包围盒。
24.步骤5)根据二维矩形包围盒的两垂直边第一方向d1、第二方向d2及二维矩形包围盒两垂直边方向对应长度第一长度l1与第二长度l2,确定投影平面的y轴方向mainy,如图3
所示,具体包括:
25.①
当第一长度l1与第二长度l2均为0时,表示模型为一维模型,投影平面的y轴方向mainy方向任取第一方向d1或第二方向d2;
26.②
当第一长度l1与第二长度l2其中一个为0时,表示模型为二维模型,取第一长度l1与第二长度l2中不为0的方向为投影平面的y轴方向mainy;
27.③
当第一长度l1与第二长度l2均不为0时:
28.a.投影平面的y轴方向mainy方向分别取第一方向d1与第二方向d2,将原始点投影在投影平面的x轴方向mainx与投影平面的y轴方向mainy所在平面。
29.b.分别获取投影后所有点中间距小于最小构件参数(minmemberreflength)范围内点的数量第一数量s1和第二数量s2,投影后所有点中间距小于最小构件参数(minmemberreflength)范围内点的最小间距第一距离d1和第二距离d2。
30.c.将第一数量s1和第二数量s2中较小值对应的包围盒方向选定为投影平面的y轴方向mainy,或当第一数量s1和第二数量s2大小一致时,则将第一距离d1和第二距离d2中较大值对应的包围盒方向选定为投影平面的y轴方向mainy。
31.步骤6)将投影平面的x轴方向mainx轴绕投影平面的y轴方向mainy轴旋转角度θ,重复步骤5)确定最终的投影平面的x轴方向mainx,最优的二维投影面即以投影平面的x轴方向mainx、投影平面的y轴方向mainy为主轴的投影平面。
32.本实施例中的角度θ遍历范围为-45
°
~ 45
°
,但为提高计算效率,结合工程实践经验,通常θ可取
±
45
°
、
±
30
°
、
±
15
°
、0
°
。
33.如图5、图6所示,为对比呈现该方法的使用效果,未使用该方法的出图结果如图5所示,使用该方法后的图纸效果如图6所示。两图对比显见,使用该模块方法选取了针对该结构最优的投影平面,最大限度的避免了二维投影面各部件间的重叠,达到了最好的投影效果。
34.如图4所示,所述的自动生成图纸,具体包括:
35.步骤1)生成图块集:将存在位置依附关系的图块绑定为图块集,如平立面图,计算每个图块的相对偏移向量,具体为:生成图块集相对偏移向量=图块绑定后坐标-图块绑定前坐标。
36.步骤2)确定图纸初始可用绘图区域:考虑图框位置及图名栏位置后得到初始绘图的矩形区域作为初始可用绘图区域,具体为:初始可用绘图区域左上角坐标=图框区域左上角坐标;初始可用绘图区域左下角x坐标=图框区域左下角x坐标,初始可用绘图区域左下角y坐标=图名栏左上角y坐标;初始可用绘图区域右上角x坐标=图名栏左上角x坐标,初始可用绘图区域右上角y坐标=图框区域右上角y坐标;初始可用绘图区域右下角坐标=图名栏左上角坐标。
37.步骤3)放置图块集:遵循先从上到下、后从左到右的顺序判断可用绘图区域能否放入图块集,放入图块集后更新图块集的整体偏移向量,需保证第一个图块集必定放入图纸。
38.优选地,记录每张图纸中放入的图块及图块偏移向量,图块的偏移向量为生成图块集时的相对偏移向量及所在图块集的整体偏移向量叠加,具体为:图块集整体偏移向量=图块放入图纸后坐标-图块放入图纸前坐标;图块的偏移向量=生成图块集相对偏移向
量 图块集整体偏移向量。
39.步骤4)确定放入图块集后的凹六边形可用绘图区域:定义可用绘图区域数据形式为:左下角点、右下角点、右上角点和左上角点,其中左上角点为现有所有图块集包围盒右下角点,取出左上角点左上方区域即可形成一个凹六边形的绘图区域,具体为:现有所有图块集包围盒x坐标=现有所有图块集x坐标最大值,现有所有图块集包围盒y坐标=现有所有图块集y坐标最小值。
40.步骤5)更新绘图区域:放入图块集后更新可用绘图区域的左上角点,从而更新初始绘图区域。
41.步骤6)重复执行步骤3)~步骤5),直至图纸中不可再放入图块集,生成一张新的图纸。
42.步骤7)重复执行步骤1)~步骤7),直至所有图块集都放入到图纸,实现图纸的自动生成。
43.如图7、图8所示,为未使用/使用本方法的出图结果,两图对比显见,本方法最大限度的利用了图纸空间,同时各图块集间位置逻辑更加合理,图纸视觉效果更加简洁,可读性更强。实施例2
44.以设计长度60米、宽度50米、高度20米的倒三角空间网壳结构为例,使用最优投影平面求解方法和自动布置图块方法,本实施例具体步骤包括:
45.首先,确定结构最优投影平面:
46.步骤1)遍历构件,计算构件长度,取出最小构件尺寸2.14,最小构件参数(minmemberreflength)=2.14*0.5=1.07,作为后续判断依据;
47.步骤2)计算所有节点x坐标的最大差值为60,y坐标的最大差值为35,z坐标的最大差值为15.5,暂定差值最大的x坐标轴方向设为投影平面的x轴方向mainx;
48.步骤3)将所有节点沿投影平面的x轴方向mainx方向投影,任取与投影平面的x轴方向垂直的向量projectionx(0,1,0)作为投影后的x轴方向,计算所有投影后节点的凸包;
49.步骤4)计算投影后节点的二维矩形包围盒,矩形包围盒垂直边方向分别为第一方向d1,第二方向d2。第一方向d1初始值为与投影平面的x轴方向垂直的向量projectionx(0,1,0),绕投影平面的x轴方向mainx旋转n次,旋转步长为90
°
/n。计算凸包节点在不同第一方向d1、第二方向d2下的二维包围盒的面积,面积最小的二维包围盒对应第一方向d1为(0,26.82,11.11),第二方向d2为(0,-2.96,7.13);
50.步骤5)二维矩形包围盒第一方向d1方向对应长度第一长度l1=29.03,第二方向d2方向对应长度第二长度l2=7.72。第一长度l1与第二长度l2均不为0,因此投影平面的y轴方向mainy方向分别取第一方向d1与第二方向d2,将原始点投影在投影平面的x轴方向mainx与投影平面的y轴方向mainy所在平面,分别获取投影后所有点中间距小于最小构件参数(minmemberreflength)范围内存在其他点的点的数量第一数量s1和第二数量s2和点的最小间距第一距离d1和第二距离d2,第一数量s1=8,第二数量s2=197,第一距离d1=0.32,第二距离d2=0.01;
51.第一数量s1远小于第二数量s2,因此选定第一数量s1对应的包围盒方向第一方向d1为投影平面的y轴方向mainy,单位向量投影平面的y轴方向mainy为(0,0.92,0.38);
52.步骤6)将投影平面的x轴方向mainx轴绕投影平面的y轴方向mainy轴旋转
±
45度、
±
30度、
±
15度、0度,根据步骤5)选取最终的投影平面的x轴方向mainx,调整后的投影平面的x轴方向mainx为(0.97,-0.10,0.24);
53.步骤7)最终确定以投影平面的x轴方向mainx(0.97,-0.10,0.24)、投影平面的y轴方向mainy(0,0.92,0.38)为主轴的投影平面后,进行自动布置图块;
54.步骤8)将有位置依附关系的平立面图图块绑定为图块集,包括平面图、正视图、右视图和图名,计算每个图块的包围盒,平面图包围盒(0,-250)(600,-250)(600,250)(0,250),正视图包围盒(0,10)(600,10)(600,180)(0,180),右视图包围盒(-180,-250)(-10,-250)(-10,250)(-180,250),图名包围盒(-17.28,-7.9)(24.63,-7.9)(24.63,-3)(-17.28,-3);
55.步骤9)计算每个图块的相对偏移向量,平面图相对偏移向量(0,0),正视图相对偏移向量(0,-495),右视图相对偏移向量(845,0),图名相对偏移向量(413.83,-514.5);
56.步骤10)确定图纸初始绘图区域,考虑图框位置及图名栏位置后得到初始绘图的矩形区域作为初始可用绘图区域;
57.步骤11)遵循先从上到下、后从左到右的顺序判断可用绘图区域能否放入图块集,放入图块集后更新图块集的整体偏移向量,计算得到整体偏移向量(45,561);
58.步骤12)叠加生成图块集时的相对偏移向量及所在图块集的整体偏移向量计算得到图块最终偏移向量,平面图最终偏移向量(45,561),正视图最终偏移向量(45,66),右视图最终偏移向量(890,561),图名最终偏移向量(458.83,56.5);
59.步骤13)判断上图剩余区域已无法插入新图块,生成一张新图纸;
60.步骤14)计算每个图块的包围盒:
61.安装图包围盒(3.5,83.97)(603.9,83.97)(603.9,56.41)(-3.5,56.41),;
62.构件重量表包围盒(0,0)(154,0)(154,66.7)(0,66.7),;
63.构件材料表包围盒(0,0)(368.88,0)(368.88,453.1)(0,453.1),;
64.构件材料表_续表1包围盒(0,0)(360.24,0)(360.24,453.1)(0,453.1);
65.步骤15)计算每个图块的相对偏移向量,安装图(48.5,754.59),构件重量表(45,583.91),构件材料表(45,110.81),构件材料表_续表1(672.4,357.9);
66.步骤16)确定图纸初始绘图区域,考虑图框位置及图名栏位置后得到初始绘图的矩形区域作为初始可用绘图区域;
67.步骤17)遵循先从上到下、后从左到右的顺序判断可用绘图区域能否放入图块集,放入图块集后更新图块集的整体偏移向量,计算得到整体偏移向量(0,0);
68.步骤18)叠加生成图块集时的相对偏移向量及所在图块集的整体偏移向量计算得到图块最终偏移向量,安装图(48.5,754.59),构件重量表(45,583.91),构件材料表(45,110.81),构件材料表_续表1(672.4,357.9)。
69.图9为上述实施例中生成的结构平立面图,图10为上述实施例中部分结构安装图。
70.经上述步骤实现了该空间结构施工图纸自动绘制;出图时间为20s,与现有技术相比,提高施工图绘制效率90%以上;获取到了结构最优投影平面,图纸文字重合率为0%,且完全符合施工图绘制标准要求。
71.与现有技术无法实现复杂空间结构施工图纸自动绘制、仍然是手动出图,耗时几
小时或者更久相比,本方法对于复杂空间结构可提高施工图绘制效率90%以上;现有技术无法解决图纸文字重合问题,通过本技术可获取结构最优投影平面,并保证图纸文字重合率低于5%,且完全符合施工图绘制标准要求。
72.上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。