一种盾构操作系统及方法
1.技术领域
2.本发明涉及盾构机控制技术领域,尤其涉及一种盾构操作系统及方法。
3.
背景技术:
4.盾构机操作控制主要依靠操作员在操作室的手动操作,操作室通常设置在盾构机本体上,因此一间操作室仅能够控制台盾构机,基于盾构施工通常是两班倒,因此针对一台盾构机通常需要配置两名操作员,在左右双线盾构施工中,需要配置四名操作员,导致操作员极为紧缺。而且操作室设置于盾构机本体上,盾构机处于隧道内,受到隧道挖掘直径和盾构机设备空间的限制,操作室处于昏暗和拥挤的环境,可能导致操作员在心理和身体上的不适应,也会影响到盾构施工的进度和质量。
5.
技术实现要素:
6.针对现有技术中掘进机在掘进过程中不同组推进油缸无法精确计算所需推力的技术问题,本发明提供了一种盾构操作系统及方法。
7.为实现以上目的,本发明通过以下技术方案予以实现:本发明实施例的第一方面,提供一种盾构操作系统,所述盾构操作系统包括至少一台远程操作台、通过电气线束与所述远程操作台通信连接的至少一台盾构机;所述盾构机上配置有图像采集装置,用于采集图像采集装置对应采集区域的图像信息,所述图像采集装置与所述采集区域存在一一对应关系;所述远程操作台至少配置有人机操作界面、监控界面、导向及掘进管理界面;所述盾构机用于,通过所述电气线束向所述远程操作台上报的掘进方向参数以及盾构机挖掘姿态;所述远程操作台用于,接收所述图像采集装置采集的对应采集区域的图像信息并根据所述图像信息在所述监控界面展示对应的图像;并,根据所述掘进方向参数以及所述盾构机挖掘姿态构建基于所述盾构机视角的导向及掘进模型,并根据所述导向及掘进模型在所述导向及掘进管理界面展示导向及掘进状态;并,基于操作员在所述人机操作界面的操作,生成对应的操作指令,并通过电气线束向所述盾构机发送所述操作指令,以使所述盾构机执行所述操作指令,所述操作指令用于调整所述掘进方向参数和所述盾构机挖掘姿态。
8.可选地,所述远程操作台具体用于:根据预设时长内的多个所述盾构机挖掘姿态,确定所述掘进方向参数中每一方向子参数的累计误差量;
根据各所述方向子参数的累计误差量以及所述掘进方向参数,以所述盾构机的视角构建参数空间;将所述盾构机挖掘姿态与所述参数空间进行匹配,构建基于所述盾构机的视角的导向及掘进模型。
9.可选地,所述人机操作界面设置有盾构机模式切换按钮、紧停按钮、报警指示灯、复位按钮、动力单元控制按钮、工作模式选择按钮、推进油缸控制按钮、拼装指示灯、推进分区调节旋钮、皮带机转向选择按钮、皮带机控制模式选择按钮、螺旋机速度调节按钮、螺旋机转向选择按钮、螺旋机闸门开关选择按钮、刀盘工作模式选择按钮和刀盘控制模式选择按钮中的至少一者。
10.可选地,所述盾构操作系统上设置有紧急电话,所述紧急电话通过所述电气线束与所述盾构机上的工业电话和/或工业广播连接;所述紧急电话用于通过拨号连话所述工业电话。
11.可选地,所述远程操作台包括壳体、与所述壳体可拆卸固定的第一操作台连接组件;所述第一操作台连接组件用于与第二操作台连接组件卡接,以将所述远程操作台与配置所述第二操作台连接组件的所述远程操作台进行机械连接。
12.可选地,所述壳体的底部设置有多个固定底座,所述固定底座配置有减震组件和高度微调组件;所述减震组件用于对起到减震作用,从而避免所述远程操作台内的电气零部件在运输和放置过程中损坏;所述高度微调组件能够基于手动调整,调整所述远程操作台各个固定底座相对放置面的高度,以防止所述远程操作台在运输过程中和安装后摇晃。
13.本发明实施例的第二方面,提供一种盾构操作方法,应用于第一方面中任意一项所述的盾构操作系统,所述盾构操作系统包括至少一台远程操作台、通过电气线束与所述远程操作台通信连接的至少一台盾构机;其中,所述盾构机上配置有图像采集装置,用于采集图像采集装置对应采集区域的图像信息,所述图像采集装置与所述采集区域存在一一对应关系;所述远程操作台至少配置有人机操作界面、监控界面、导向及掘进管理界面;所述方法包括:基于所述电气线束,通过所述盾构机向所述远程操作台上报的掘进方向参数以及盾构机挖掘姿态;通过所述远程操作台接收所述图像采集装置采集的对应采集区域的图像信息并根据所述图像信息在所述监控界面展示对应的图像;并,根据所述掘进方向参数以及所述盾构机挖掘姿态构建基于所述盾构机视角的导向及掘进模型,并根据所述导向及掘进模型在所述导向及掘进管理界面展示导向及掘进状态;并,基于操作员在所述人机操作界面的操作,生成对应的操作指令,并通过电气线束向所述盾构机发送所述操作指令,以使所述盾构机执行所述操作指令,所述操作指令用于调整所述掘进方向参数和所述盾构机挖掘姿态。
14.可选地,所述根据所述掘进方向参数以及所述盾构机挖掘姿态构建基于所述盾构机视角的导向及掘进模型的步骤,包括:根据预设时长内的多个所述盾构机挖掘姿态,确定所述掘进方向参数中每一方向子参数的累计误差量;根据各所述方向子参数的累计误差量以及所述掘进方向参数,以所述盾构机的视角构建参数空间;将所述盾构机挖掘姿态与所述参数空间进行匹配,构建基于所述盾构机的视角的导向及掘进模型。
15.有益效果本发明提供了多功能色谱分析系统。与现有技术相比具备以下有益效果:1、远程操作台独立集成,可匹配现有任意类型的盾构机。
16.2、现场可根据实际情况,通过远程操作台将盾构机在远程控制模式和地下本地控制模式之间灵活切换。
17.3、通过将远程操作台进行连接,可以满足一人远程对多台盾构机的操作控制,不仅解决人员紧缺问题,降低成本,也可实现地下无人值守施工,提高施工效率。
18.附图说明
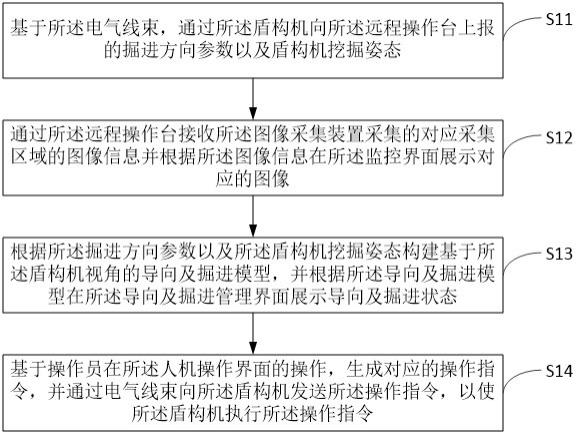
19.图1为根据本发明提供的一种盾构操作方法的流程图。
20.具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.本发明提供一种技术方案:提供一种盾构操作系统,所述盾构操作系统包括至少一台远程操作台、通过电气线束与所述远程操作台通信连接的至少一台盾构机;所述盾构机上配置有图像采集装置,用于采集图像采集装置对应采集区域的图像信息,所述图像采集装置与所述采集区域存在一一对应关系;所述远程操作台至少配置有人机操作界面、监控界面、导向及掘进管理界面;所述盾构机用于,通过所述电气线束向所述远程操作台上报的掘进方向参数以及盾构机挖掘姿态;所述远程操作台用于,接收所述图像采集装置采集的对应采集区域的图像信息并根据所述图像信息在所述监控界面展示对应的图像;并,根据所述掘进方向参数以及所述盾构机挖掘姿态构建基于所述盾构机视角的导向及掘进模型,并根据所述导向及掘进模型在所述导向及掘进管理界面展示导向及掘进状态;并,基于操作员在所述人机操作界面的操作,生成对应的操作指令,并通过电气线束
向所述盾构机发送所述操作指令,以使所述盾构机执行所述操作指令,所述操作指令用于调整所述掘进方向参数和所述盾构机挖掘姿态。
23.可选地,所述远程操作台具体用于:根据预设时长内的多个所述盾构机挖掘姿态,确定所述掘进方向参数中每一方向子参数的累计误差量;根据各所述方向子参数的累计误差量以及所述掘进方向参数,以所述盾构机的视角构建参数空间;将所述盾构机挖掘姿态与所述参数空间进行匹配,构建基于所述盾构机的视角的导向及掘进模型。
24.可选地,所述人机操作界面设置有盾构机模式切换按钮、紧停按钮、报警指示灯、复位按钮、动力单元控制按钮、工作模式选择按钮、推进油缸控制按钮、拼装指示灯、推进分区调节旋钮、皮带机转向选择按钮、皮带机控制模式选择按钮、螺旋机速度调节按钮、螺旋机转向选择按钮、螺旋机闸门开关选择按钮、刀盘工作模式选择按钮和刀盘控制模式选择按钮中的至少一者。
25.可选地,所述盾构操作系统上设置有紧急电话,所述紧急电话通过所述电气线束与所述盾构机上的工业电话和/或工业广播连接;所述紧急电话用于通过拨号连话所述工业电话。
26.可选地,所述远程操作台包括壳体、与所述壳体可拆卸固定的第一操作台连接组件;所述第一操作台连接组件用于与第二操作台连接组件卡接,以将所述远程操作台与配置所述第二操作台连接组件的所述远程操作台进行机械连接。
27.可选地,所述壳体的底部设置有多个固定底座,所述固定底座配置有减震组件和高度微调组件;所述减震组件用于对起到减震作用,从而避免所述远程操作台内的电气零部件在运输和放置过程中损坏;所述高度微调组件能够基于手动调整,调整所述远程操作台各个固定底座相对放置面的高度,以防止所述远程操作台在运输过程中和安装后摇晃。
28.在本公开实施例中,所述壳体采用不锈钢或者铁板制作而成。所述壳体上开有四个孔,分别用于放置两个人机操作界,一个监控界面和一个导向和导向及掘进管理界面,所述人机操作界面可以为工业级触摸液晶显示屏,其上包含盾构机人机交互软件,也可以为实体按钮操作界面,可满足操作人员进行日常操作和监控;所述监控界面为工业级显示屏,主要对盾构机核心区域进行监控,核心区域可以包括:土仓、拼装区域、砂浆搅拌区域、螺旋机出土口区域、皮带机出土口区域和地下司机室区域;所述导向及掘进管理界面为工业级显示屏,主要实时监测盾构机挖掘姿态,为操作人员推进提供方向支持。
29.其中,所述壳体的底部可以配置四个固定底座,主要为盾构机远程操作台提供支撑和固定作用,固定底座包含底座支撑组件、减震组件和高度微调组件,当盾构机远程操作台放置到位后,可手动调节高度微调组件,进行远程操作台的高度调节,所述减震组件可避免远程操作台在运输和放置过程中损坏。
30.所述壳体的左、右两侧均可以用螺栓可拆卸固定第一操作台连接组件,第一操作
台连接组件能够与第二操作台连接组件卡接,使得多台远程操作台连接在一起,可以实现一人操作多台远程操作台。
31.所述壳体上设置操作面板,面板上可以设置操作按钮,以满足操作员的日常操作使用,设置操作按钮可以包括盾构机模式切换按钮,用于将盾构机在本地操作模式和远程操作模式之间切换;紧停按钮,用于紧急停止盾构机工作;报警指示灯,用于在发生故障或者紧急事件时点亮,提示操作员;复位按钮,用于将程序或者控制参数恢复;动力单元控制按钮,用于启动或者停止盾构机的动力单元,例如,启动或者停止柴油机;工作模式选择按钮,用于将盾构机在掘进模式或者拼装模式之间切换;推进油缸控制按钮,用于控制推进油缸伸出或者缩回;拼装指示灯,用于指示盾构机处于拼接状态或者拼接完成状态;推进分区调节旋钮,用于对盾构机进行推进分区调节;皮带机转向选择按钮,用于控制皮带机正转或者反转;皮带机控制模式选择按钮,用于将皮带机在本地控制模式和远程控制模式之间切换;螺旋机速度调节按钮;螺旋机转向选择按钮,用于远程控制螺旋机正转或者反转;螺旋机闸门开关选择按钮,用于远程控制螺旋机闸门打开或者关闭;刀盘工作模式选择按钮,用于远程将刀盘在点动模式和启动模式之间切换;刀盘控制模式选择按钮,用于将刀盘在本地控制模式和远程控制模式之间切换。
32.所述壳体上设置有一部紧急电话,该紧急电话不仅可以与盾构机上工业电话进行拨号连话,也可以进行广播喊话作用。
33.所述壳体后部含有操作控制柜,所述操作控制柜为双开门设计,里面可放置盾构机远程操作台供电设备、控制plc系统,视频监控录像机设备、导向和掘进管理系统工控机设备和地面地下网络光端机设备等。
34.基于相同的发明构思,本发明实施例还提供一种盾构操作方法,应用于上述实施例中任意一项所述的盾构操作系统,所述盾构操作系统包括至少一台远程操作台、通过电气线束与所述远程操作台通信连接的至少一台盾构机;其中,所述盾构机上配置有图像采集装置,用于采集图像采集装置对应采集区域的图像信息,所述图像采集装置与所述采集区域存在一一对应关系;所述远程操作台至少配置有人机操作界面、监控界面、导向及掘进管理界面;参阅图1所示,为根据本发明提供的一种盾构操作方法的流程图,所述方法包括:在步骤s11中,基于所述电气线束,通过所述盾构机向所述远程操作台上报的掘进方向参数以及盾构机挖掘姿态;在步骤s12中,通过所述远程操作台接收所述图像采集装置采集的对应采集区域的图像信息并根据所述图像信息在所述监控界面展示对应的图像;在步骤s13中,根据所述掘进方向参数以及所述盾构机挖掘姿态构建基于所述盾构机视角的导向及掘进模型,并根据所述导向及掘进模型在所述导向及掘进管理界面展示导向及掘进状态;在步骤s14中,基于操作员在所述人机操作界面的操作,生成对应的操作指令,并通过电气线束向所述盾构机发送所述操作指令,以使所述盾构机执行所述操作指令,所述操作指令用于调整所述掘进方向参数和所述盾构机挖掘姿态。
35.可选地,在步骤s13中,所述根据所述掘进方向参数以及所述盾构机挖掘姿态构建基于所述盾构机视角的导向及掘进模型的步骤,包括:
根据预设时长内的多个所述盾构机挖掘姿态,确定所述掘进方向参数中每一方向子参数的累计误差量;根据各所述方向子参数的累计误差量以及所述掘进方向参数,以所述盾构机的视角构建参数空间;将所述盾构机挖掘姿态与所述参数空间进行匹配,构建基于所述盾构机的视角的导向及掘进模型。
36.以上述依据本技术的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项申请技术思想的范围内,进行多样的变更以及修改。本项申请的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
37.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。