1.本发明涉河道管理应用的淤泥清除设备技术领域,特别是一种河道淤泥、泥浆清理器。
背景技术:
2.在河道管理中,为了保证的河道的畅通,相关部门会在需要时对河道底部沉积的淤泥(包括泥浆)进行疏通清理。现有的河道清淤设备,一般结构包括船体和挖掘机构等,具体工作时,工作人员人为操控船体到作业水域,然后通过挖掘机构把河底淤泥挖掘后装入淤泥船内。上述操作模式,由于船体及挖掘机构结构复杂,成本高,且需要工作人员人为操作因此清淤成本也较高,还有就是,工作人员在河道之上操作也存在跌落到河中的安全风险,因此,现有的河道清淤设备还存在一定的缺点。基于上述,提供一种结构相对简单,使用成本低,且不需要工作人员在河流上操作、减少安全风险的清淤装置显得尤为必要。
技术实现要素:
3.为了克服现有用于河道清除淤泥的设备由于结构所限,存在如背景所述弊端,本发明提供了结构相对简单紧凑、使用方便,应用中,工作人员在岸边就可无线操作,控制设备进入相关作业区域、需要的水位深度内进行作业,清淤时通过电动粉碎机将淤泥粉碎与水混合,然后水污混合物被轴流抽污泵经管道排出到岸上进行过滤,过滤后水回流入河道内,由此实现减少了设备投入及使用成本,并给工作人员带来了便利,且减少了工作人员安全事故的一种河道淤泥、泥浆清理器。
4.本发明解决其技术问题所采用的技术方案是:
5.一种河道淤泥、泥浆清理器,包括船型浮箱、电动螺旋桨、电动打气泵、电动推杆、电动粉碎机、电源模块、电源开关、电动抽污泵、电磁阀、水压检测器,其特征在于还具有接收电路、控制电路、无线遥控电路,电动螺旋桨至少有两套,两套电动螺旋桨分别安装在浮箱的两侧;所述电动打气泵安装在浮箱外下端、且其进气管连接有通气管,通气管高度高于水面,电动打气泵的排气管和浮箱内互通;所述电磁阀有两套,两套电磁阀一端分别安装在浮箱上下端;所述电动推杆有两套,两套电动推杆的上端及水压检测器分别安装在浮箱的下端,电动粉碎机、电动抽污泵分别安装在两套电动推杆的下端;所述电动抽污泵的排污管道末端位于污泥过滤设备上;所述接收电路、控制电路、电源模块安装在元件盒内;所述接收电路的其中七路电源输出端和两套电动螺旋桨、电动打气泵、两套电动推杆、电动粉碎机、电动抽污泵的电源输入端分别电性连接,接收电路的第八路电源输出端和控制电路的控制电源输入端电性连接,控制电路的电源输出端和两只电磁阀的电源输入端电性连接;所述水压检测器的信号输出端和控制电路的信号输入端电性连接。
6.进一步地,所述两套电动螺旋浆的外侧端安装有保护筒,保护筒的表面具有若干开孔。
7.进一步地,所述电磁阀是常闭阀芯电磁阀。
8.进一步地,所述电动推杆是往复式电动伸缩杆。
9.进一步地,所述接收电路包括电性连接的三套无线接收电路模块、继电器,三套无线接收电路模块的正极电源输入端和第一只继电器、第二只继电器、第三只继电器、第四只继电器的正极控制电源输入端连接;三套无线接收电路模块的负极电源输入端和第一只继电器、第二只继电器、第三只继电器、第四只继电器的负极控制电源输入端负极电源输入端,第五只继电器、第六只继电器、第七只继电器、第八只继电器、第九只继电器的负极电源输入端连接;第五只继电器、第六只继电器、第七只继电器、第八只继电器、第九只继电器的两个控制电源输入端连接。
10.进一步地,所述无线遥控电路包括三套无线遥控板,三套无线遥控板的电源输入两端分别连接在一起,三套无线遥控板内部的编码电路编码不一致,三套无线接收电路模块内部的编码电路编码不一致,三套无线接收电路模块的编码分别和三套无线遥控板的编码一致。
11.进一步地,所述控制电路包括电性连接的可调电阻、电阻、npn三极管、继电器,继电器负极电源输入端和npn三极管集电极连接,第一只电阻一端和npn三极管基极连接,第二只电阻一端和第一只电阻另一端、可调电阻一端连接,第二只电阻另一端和npn三极管发射极连接。
12.本发明有益效果是:本发明结构相对简单紧凑、使用方便,应用中,工作人员在岸边通过无线控制两套电动螺旋桨的工作方式能控制浮箱运动到相关作业水域上方,通过控制电动打气泵及电磁阀工作方式,能使浮箱进水、稳定在不同水深内的作业区域作业(水压检测器能控制浮箱到设定水深后自动停止运动,保持合适的水深),且在两套电动推杆的协同作用下,能尽可能使电动粉碎机及电动抽污泵接近水下作业点。工作时,电动粉碎机对需要清淤的河底污泥加进行粉碎,然后大功率抽污泵将水和淤泥混合物快速抽出经管道排出到岸上的过滤筛网上,过滤后水回流入河内,过滤后淤泥停留在过滤设备内、后续统一处理(也可经抽出到岸边沉淀池内,沉淀后清水排出下、端污泥后续统一处理)。本发明减少了设备投入及使用成本,并给工作人员带来了便利,且减少了工作人员安全事故发生的几率。综上所述,所以本发明具有良好的应用前景。
附图说明
13.以下结合附图和实施例将本发明做进一步说明。
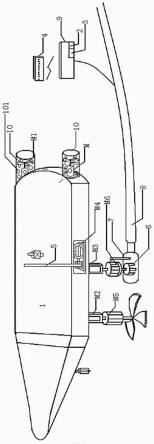
14.图1是本发明整体结构结构示意图。
15.图2、3是本发明电路图。
具体实施方式
16.图1、2、3中所示,一种河道淤泥、泥浆清理器,包括船型浮箱1、电动螺旋桨m及m1、电动打气泵m4、电动推杆m2及m3、电动粉碎机m5、电源模块a、电源开关s1、电动抽污泵、电磁阀dc1及dc2、水压检测器a4,还具有接收电路2、控制电路3、无线遥控电路4,浮箱1是中空结构,电动螺旋桨有两套,两套电动螺旋桨m及m1分别经螺杆螺母安装在浮箱1的后端两侧且浆叶位于后端;所述电动打气泵m4经螺杆螺母密封安装在浮箱1外下端中部的壳体内且其进气管连接有一根垂直分布的通气管5(通气管高度高于水面),电动打气泵m4的排气管和
浮箱1后端左部的进气管经管道接头连接;所述电磁阀有两套,浮箱1的上端中部及后端下中部分别垂直焊接有一只连接管,两套电磁阀dc1及dc2一端和两只连接管一端分别经螺纹连接;所述电动推杆有两套,两套电动推杆m2及m3的筒体上端分别经螺杆螺母安装在浮箱1的前下端中部、壳体外下端中部,防水电动粉碎机m5的壳体上端经螺杆螺母安装在前端一套电动推杆m2的活动杆下端;所述电动抽污泵包括防水电机m6、叶轮6、筒体7,电机m6垂直分布安装在筒体7的上端外中部且其转轴经由筒体7上端中部开孔引入筒体7内,叶轮6安装在电机m6的转轴下端且位于筒体中部内,电机m6的壳体上端经螺杆螺母安装在第二套电动推杆m3的活动杆下端;所述筒体7的右端焊接有一只排污管,排污管外侧套有一只排污胶管8、且胶管8另一端位于岸边的过滤网上;所述水压检测器a4经螺杆螺母安装在浮箱1前外下端且进水管位于下部,接收电路2、控制电路3、电源模块a安装在元件盒9内电路板上,元件盒9位于岸上,无线遥控电路4工作人员随身携带。两套电动螺旋浆m及m1的外侧端安装有一个后端为开放式结构的保护筒10(防止其他物件接触浆叶),保护筒的表面具有若干开孔101(保证浆叶处水的流动)。
17.图1、2、3所示,电源模块a是交流220v转直流24v开关电源模块成品(功率5kw);电动推杆m2及m3工作电压直流24v的往复式电动伸缩杆成品(功率100w)。电磁阀、电动粉碎机、电动推杆、电动气泵、电动螺旋桨、水压检测器和电源模块相连的导线密封套在一根柔性软管内,软管和胶管外侧经固定夹安装在一起。接收电路包括经电路板布线连接型号twh9238的三套无线接收电路模块a1、a2、a3,继电器k1、k2、k3、k4、k、k5、k6、k7、k8、k9,三套无线接收电路模块a1、a2、a3的正极电源输入端1脚和第一只继电器k3、第二只继电器k4、第三只继电器k、第四只继电器k58的正极控制电源输入端连接;三套无线接收电路模块a1、a2、a3的负极电源输入端2脚和第一只继电器k3、第二只继电器k4、第三只继电器k、第四只继电器k5的负极控制电源输入端负极电源输入端,第五只继电器k1、第六只继电器k2、第七只继电器k7、第八只继电器k8、第九只继电器k9的负极电源输入端连接;第五只继电器k1、第六只继电器k2、第七只继电器k7、第八只继电器k8、第九只继电器k9的两个控制电源输入端连接。无线遥控电路包括三套型号twh936的三套无线遥控板成品a5、a6、a7,三套无线遥控板a5、a6、a7的电源输入两端1及2脚分别连接在一起,并和一只24v无线发射电路专用电池两极分别连接在一起,三套无线遥控板a5、a6、a7安装在一个外壳内且发射按键位于外壳上端开孔外,三套无线遥控板a5、a6、a7内部的编码电路编码不一致,三套无线接收电路模块a1、a2、a3内部的编码电路编码不一致,三套无线接收电路模块a1、a2、a3的编码分别和三套无线遥控板a5、a6、a7的编码一致。控制电路包括经电路板布线连接的可调电阻rp、电阻r1及r2、npn三极管q1、继电器k10,继电器k10负极电源输入端和npn三极管q1集电极连接,第一只电阻r2一端和npn三极管q1基极连接,第二只电阻r1一端和第一只电阻r2另一端、可调电阻一端连接,第二只电阻r1另一端和npn三极管q1发射极连接,继电器k10正极电源输入端及控制电源输入端连接。
18.图1、2、3所示,电源模块a的电源输入端1及2脚、接收电路的继电器k1、k2、k7、k8、k9两个控制电源输入端和交流220v电源两极分别经导线连接,电源模块a的电源输出端3及4脚和接收电路的电源输入端继电器k3正极控制电源输入端及负极电源输入端、控制电路的电源输入端npn三极管q1发射极、水压检测器a4的电源输入端1及2脚分别经导线连接。接收电路中,继电器k1、k2两个常开触点端和两套电动螺旋桨m、m1的电源输入端分别经导线
连接,继电器k3及k4、k及k5两个常开触点端和两套电动推杆m2、m3的正负及负正两极电源输入端分别经导线连接;继电器k7、k8、k9两个常开触点端和电动打气泵m4、电动粉碎机m5、电动污水泵m6(电动抽污泵)的电源输入端分别经导线连接;接收电路的电源输出端无线接收电路模块a3的4脚和继电器k10控制电源输入端连接,继电器k10常闭触点端和两只电磁阀dc1、dc2的正极电源输入端经导线连接;水压检测器的信号输出端3脚和控制电路的信号输入端可调电阻rp(操作手柄位于元件盒上端开孔外)另一端经导线连接。
19.图1、2、3所示,220v交流电源进入电源模块a的电源输入端后,在电源开关s1打开前提下,电源模块a的3及4脚输出的24v直流电源进入接收电路及控制电路的电源输入端。本发明使用时,工作人员在岸边通过三套无线遥控板a5、a6、a7可控制全部设备工作方式;工作人员分别按下无线遥控板a5的第一只无线信号发射按键s1、第二只无线信号发射按键s2,无线遥控板a5发射出第一路、第二路无线闭合信号,无线接收电路模块a1接收到后3、4脚输出高电平进入继电器k1、k2正极电源输入端,继电器k1、k2得电吸合其两个控制电源输入端和两个常开触点端分别闭合,进而两套电动螺旋桨m、m1得电工作其浆叶推动浮箱1(初始位于河面水面上)朝向水中作业区域前进;到作业区域后,工作人员再次按下无线遥控板a5的第一只无线信号发射按键s1、第二只无线信号发射按键s2,无线遥控板a5发射出第一路、第二路无线开路信号,无线接收电路模块a1接收到后3、4脚会停止输出高电平进入继电器k1、k2正极电源输入端,继电器k1、k2失电不再吸合,进而两套电动螺旋桨m、m1不再工作推动浮箱1运动。实际操控中,工作人员按下无线遥控板a5的第一只无线信号发射按键s1或第二只无线信号发射按键s2,无线遥控板a5发射出第一路或第二路无线闭合信号,无线接收电路模块a1接接收到后3或4脚输出高电平进入继电器k1或k2正极电源输入端,继电器k1或k2得电吸合,进而电动螺旋桨m或m1得电工作其浆叶推动浮箱1(初始位于河面水面上)朝向左端或右端前进转弯,这样,工作人员就能方便有效控制浮箱1到达作业区域(胶管8具有长度余量)。后续工作完毕后,和上述操作过程完全一致,工作人员就可控制浮箱1连同所有设备转向后,回到岸边。通过上述,本发明能方便无线方式控制浮箱1运动到作业区域,并从作业区域回到岸边。
20.图1、2、3所示,浮箱1(长度3米、宽度1.5米左右)到达作业区域后,工作人员按下无线遥控板a7的第二只无线信号发射按键s2,无线遥控板a7发射出第二路无线闭合信号,无线接收电路模块a3接接收到后4脚会输出高电平进入继电器k10正极电源输入端及控制电源输入端,然后再经继电器k10的控制电源输入端及常闭触点端进入电磁阀dc1及dc2正极电源输入端,电磁阀dc1及dc2得电后阀芯打开,这样,浮箱1下端的水会经电磁阀dc1进入浮箱1内,浮箱1内的空气经由电磁阀dc2排出,于是,浮箱1内逐渐进水向作业区域下沉。当浮箱1下沉到水内深度不够,水压检测器a4检测到的水压相对小,这样其3脚输出的电压信号经可调电阻rp、电阻r1分压,再经电阻r2限流降压后进入npn三极管q1基极低于0.7v,npn三极管q1截止、继电器k10不会得电吸合,电磁阀dc1及dc2继续得电、浮箱1继续下沉。当浮箱1下沉到水内深度够后,水压检测器a4检测到的水压相对大,这样其3脚输出的电压信号经可调电阻rp、电阻r1分压,再经电阻r2限流降压后进入npn三极管q1基极高于0.7v,npn三极管q1导通集电极输出低电平进入继电器k10负极电源输入端、继电器k10得电吸合其控制电源输入端和常闭触点端开路,那么,电磁阀dc1及dc2会失电阀芯关闭、水不再进入浮箱1内,浮箱停留在工作人员预设的水深内作业。本发明使用前,工作人员用手调节可调电阻rp(其手
柄侧端元件盒标记有数字代表不同水深)的不同电阻值,能设定浮箱1进入不同的水深内作业,当可调电阻rp的电阻值调节得相对大时由于电阻大,那么,浮箱1下沉深度相对大、水压检测器a4的3脚输出的电压信号相对高时,npn三极管q1才会导通进而继电器k10得电,电磁阀失电,也就是说本发明水深设置阈值变大;当可调电阻rp的电阻值调节得相对小时由于电阻小,那么,浮箱1下沉深度相对小、水压检测器a4的3脚输出的电压信号相对低时,npn三极管q1就会导通进而继电器k10得电,电磁阀失电,也就是说本发明水深设置阈值变小;具体设置工作人员根据实际需要设置,满足后续作业时,电动粉碎机在电动推杆m作用下能有效接触水下作业区域。
21.图1、2、3所示,浮箱1到达作业区域并下沉到位后,工作人员分别按下无线遥控板a5的第三只无线信号发射按键s3、无线遥控板a6的第一只无线信号发射按键s1,无线遥控板a5发射出第三路无线闭合信号、无线遥控板a6发射出第一路无线闭合信号,无线接收电路模块a1接收到后5脚输出高电平进入继电器k3正极电源输入端,无线接收电路模块a2接接收到后3脚输出高电平进入继电器k正极电源输入端,继电器k3得电吸合其控制电源输入端和常开触点端闭合,进而电动推杆m2推动电动粉碎机m5下行接触水底的淤泥,继电器k得电吸合其控制电源输入端和常开触点端闭合,进而电动推杆m3推动电动抽污泵m6下行和电动粉碎机保持同步下降使其后续作业时、前端进水口能位于电动粉碎机的粉碎刀片后端稍微朝上一定位置。工作人员分别再次按下无线遥控板a5的第三只无线信号发射按键s3、无线遥控板a6的第一只无线信号发射按键s1,无线遥控板a5发射出第三路无线闭开路信号、无线遥控板a6发射出第一路无线开路信号,无线接收电路模块a1接收到后5脚停止输出高电平进入继电器k3正极电源输入端,无线接收电路模块a2接收到后3脚停止输出高电平进入继电器k正极电源输入端,继电器k3失电不再吸合其控制电源输入端和常开触点端开路,进而电动推杆m2不再推动电动粉碎机m5下行、保持合适深度粉碎河底淤泥(实际情况下,如果电动粉碎机下行过多下端接触淤泥,浮箱上浮一些不会影响粉碎作业,反之如果下行过少后续粉碎中,工作人员看抽出的污水浑浊度低,就还可控制电动粉碎机及电动抽污泵下行一定深度),继电器k失电不再吸合其控制电源输入端和常开触点端开路,进而电动推杆m3不再推动电动抽污泵m6下行、保持合适深度为后续抽出淤泥污水做好准备。
22.图1、2、3所示,当电动粉碎机和电动抽污泵到位后,工作人员分别按下无线遥控板a6的第三只无线信号发射按键s3、第四只无线信号发射按键s4,无线遥控板a6发射出第三路、第四路无线闭合信号,无线接收电路模块a2接收到后5、6脚输出高电平分别进入继电器k7、k8正极电源输入端,于是,继电器k7、k8得电吸合其控制电源输入端和常开触点端闭合,这样,电动粉碎机m5及电动抽污泵m6会分别得电工作,电动粉碎机m5对需要清淤的河底污泥加进行粉碎,然后大功率抽污泵m6将水和淤泥混合物快速抽出经管道8排出到岸上的过滤筛网上,过滤后水回流入河内,过滤后淤泥停留在过滤设备内后续统一处理(也可经抽出到岸边沉淀池内,沉淀后清水排出下端污泥后续统一处理)。作业完后,工作人员通过无线遥控板a7控制电磁阀dc1、dc2得电阀芯打开,然后工作人员按下无线遥控板a7的第一只无线信号发射按键s1,无线遥控板a7发射出第一路无线闭合路信号,无线接收电路模块a3接收到后3脚输出高电平进入继电器k9正极电源输入端,继电器k9得电吸合其控制电源输入端和常开触点端闭合,进而电动打气泵m4得电工作为浮箱1内泵入高压力空气(通气管5位于水面上),将浮箱内水泵出,这样浮箱1浮力变大浮到水面上,然后工作人员通过无线遥控
板a7控制电磁阀dc1、dc2失电阀芯关闭,接着,工作人员再次按下无线遥控板a7的第一只无线信号发射按键s1,无线遥控板a7发射出第一路无线开路信号,无线接收电路模块a3接收到后3脚停止输出高电平进入继电器k9正极电源输入端,继电器k9失电不再吸合其控制电源输入端和常开触点端开路,进而电动打气泵m9失电不再为浮箱1内泵入高压力空气,为工作人员控制浮箱运动到岸边做好准备。
23.图1、2、3所示,浮箱1上浮后,工作人员分别用手再次按下无线遥控板a6的第三只无线信号发射按键s3、第四只无线信号发射按键s4,无线遥控板a6发射出第三路、第四路无线开路信号,无线接收电路模块a2接接收到后5、6脚停止输出高电平分别进入继电器k7、k8正极电源输入端,于是,继电器k7、k8失电不再吸合其控制电源输入端和常开触点端开路,这样,电动粉碎机m5及电动抽污泵m6会分别失电不再工作。然后,工作人员分别按下无线遥控板a5的第四只无线信号发射按键s4、无线遥控板a6的第二只无线信号发射按键s2,无线遥控板a5发射出第四路无线闭合信号、无线遥控板a6发射出第二路无线闭合信号,无线接收电路模块a1接收到后6脚输出高电平进入继电器k4正极电源输入端,无线接收电路模块a2接接收到后4脚输出高电平进入继电器k5正极电源输入端,继电器k4得电吸合其控制电源输入端和常开触点端闭合,进而电动推杆m2带动电动粉碎机m5上行恢复到初始位置,继电器k5得电吸合其控制电源输入端和常开触点端闭合,进而电动推杆m3带动电动抽污泵m6上行和电动粉碎机保持同步上升高度回到初始位置,为浮箱运动到岸边做好准备。到位后,工作人员分别再次按下无线遥控板a5的第四只无线信号发射按键s4、无线遥控板a6的第二只无线信号发射按键s2,无线遥控板a5发射出第四路无线开路信号、无线遥控板a6发射出第二路无线开路信号,无线接收电路模块a1接收到后6脚停止输出高电平进入继电器k4正极电源输入端,无线接收电路模块a2接收到后4脚停止输出高电平进入继电器k5正极电源输入端,继电器k4失电不再吸合其控制电源输入端和常开触点端开路,进而电动推杆m2不再带动电动粉碎机m5上行,继电器k5失电不再吸合其控制电源输入端和常开触点端开路,进而电动推杆m3不再带动电动抽污泵m6上行、为浮箱运动到岸边做好准备;最后工作人员通过控制电动螺旋桨工作方式就可控制浮箱1回到岸边完成全部作业流程。图2、3中,继电器k1、k2、k3、k4、k、k5、k6、k7、k8、k9、k10是dc24v继电器;npn三极管q1型号是9013;可调电阻rp规格是1m;电阻r1阻值是47k;电阻r2阻值是4.7k;电动粉碎机m5功率4.5kw、工作电压交流220v;电动抽污泵m6功率4kw、工作电压交流220v;电动螺旋桨m及m1功率1.2kw,工作电压直流24v;水压检测器a3是型号cgwy002的压力变送器成品,其具有两个电源输入端、一个信号输出端,工作时随检测的水压不同,信号输出端会输出0-5v之间变化的电压信号;电动打气泵m4工作电压交流220v、功率2kw。
24.以上仅为本技术实施例的具体实施方式,但本技术实施例的保护范围并不局限于此,任何在本技术实施例揭露的技术范围内的变化或替换,都应涵盖在本技术实施例的保护范围之内。因此,本技术实施例的保护范围应以的权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。