1.本发明属于减震力学试验装置技术领域,具体涉及一种基于电磁控制的屈曲约束支撑。
背景技术:
2.地震这种难以预见且破坏性较大的自然灾害常年发生,为了解决地震对建筑物造成的损坏,越来越多的人开始关注并研究建筑减震技术,在减震技术逐步发展完善下,减震技术取得了长足房展,并且基于减震技术开发的减隔震装置已经被广泛使用在工程实例中。
3.屈曲约束支撑就是较为成功的一种消能减隔震装置,在结构减隔震中研究较多的是在传统的屈曲约束支撑基础上进行改造创新。但是将屈曲约束支撑和控制系统相结合来进行分析少之又少。针对传统的屈曲约束存在的缺点,以及将屈曲约束支撑和控制相结合的研究较少。基于此研制出一种新型屈曲约束支撑,即基于电磁控制的屈曲约束支撑(electromagnetic buckling restrained brace,ebrb)。
技术实现要素:
4.为此,提出一种基于电磁控制的屈曲约束支撑(ebrb)。ebrb在控制系统的控制下能更有效的来对屈曲约束支撑进行控制,并在内部两个套筒上缠绕线圈,以及在内部套筒嵌入十字形的芯材(即核心单元)作为电磁铁的铁芯,通电之后作为电磁铁使电磁铁产生磁力,使得下内套管在控制系统的控制下由电磁铁产生的吸力或者斥力来进行耗能的同时使核心单元在伸缩时减少损坏,降低了屈曲约束支撑在挤压作用下的损坏,节约了造价的成本。本发明的具体技术方案如下:一种基于电磁控制的屈曲约束支撑系统,包括屈曲约束支撑件和控制系统;所述屈曲约束支撑件包括上支撑板、下支撑板、芯材和填充材料,芯材两端分别与上支撑板和下支撑板固定连接,填充材料沿芯材的长度方向填充并包裹芯材;还包括下内套管和上内套管,下内套管和上内套管的长度均小于芯材长度且下内套管和上内套管长度之和大于芯材长度,下内套管内径大于上内套管外径;下内套管和上内套管同轴设置,下内套管套设于填充材料外且下端与下支撑板固定连接,上内套管套设于填充材料外且上端与上支撑板固定连接,上内套管下端穿入至下内套管上端中;下内套管外壁沿长度方向缠绕有第一线圈,上内套管外壁沿长度方向缠绕有第二线圈;下内套管和上内套管管壁叠合部位未缠绕第一线圈和第二线圈;第一线圈和第二线圈连接至电源,电源控制下内套管和上内套管之间产生电磁吸力或电磁斥力;所述控制系统包括上位机、arduino控制板、位移传感器,位移传感器用于监测屈曲约束支撑件的振动幅度,上位机分别与位移传感器、arduino控制板信号连接,arduino控制板与电源信号连接并用于控制电源;位移传感器产生正位移且大于设定的安全位移阈值时,下内套管和上内套管之间产生电磁吸力;位移传感器产生负位移且大于设定的安全位
移阈值时,下内套管和上内套管之间产生电磁斥力。
5.进一步地,还包括外套管,外套管的内径大于下内套管外径,长度小于芯材长度且大于芯材一半长度;外套管套设于下内套管和上内套管外,外套管下端与下支撑板固定连接。
6.进一步地,所述上内套管穿入下内套管的长度大于10cm;外套管上端与上支撑板之间的距离为20~30cm。
7.进一步地,所述下内套管和上内套管的外壁均包裹有橡胶层,第一线圈和第二线圈均包裹于橡胶层中。
8.进一步地,所述第一线圈和第二线圈外涂覆有绝缘导热材料。
9.进一步地,所述芯材的横断面为十字形、一字形、工字形或口字形。
10.进一步地,所述芯材的横断面为十字形。
11.进一步地,所述下内套管、上内套管和填充材料均为圆柱形。
12.进一步地,所述芯材、下内套管和上内套管均为铁质材料。
13.进一步地,所述第一线圈和第二线圈为漆包线。
14.本发明的原理如下:依靠位移传感器所测得数据反馈给控制系统,从而控制系统做出控制,具体控制如下:假设位移的安全值为u0(u1≤u0≤u2),u1为位移最小安全值,u2为最大位移安全值,位移传感器测得的值为u,当位移传感器测得的值u在位移安全值u0范围内(u1≤u≤u2),控制系统不工作,依靠brb自身的摆动耗能减少建筑物的损坏;当位移传感器测得的值u小于位移的最小安全值(u≤u1),此时控制系统调节缠绕在下内套管上的第一线圈的电流方向使之产生斥力,来控制建筑物以防发生倾覆;当位移传感器测得的值u大于位移的最大安全值(u≥u2),此时控制系统调节缠绕在下内套管上的第一线圈的电流方向使之产生吸力,来控制建筑物以防发生倾覆。
15.arduino控制板对电源的控制方法如下:半主动控制原理:屈曲约束支撑件使用位移传感器测量摆动幅度,通过arduino控制板控制输出pwm大小,从而达到控制电流大小。整个过程中采用串级lqr控制原理。为此整个设备控制过程中使用电流控制方案,位移大小与arduino单片机输出的pwm成反比。准确来说模拟数据类似二次函数。随着位移的变大,其电流也将会变大。整个过程中参数确定使用了arduino开发软件自带的串口调试工具。数据将会在串口调试窗口显示,之后将数据整理,最终拟合出一条二次函数图像。针对不同建筑和防震要求,可通过试验获取pwm和电流大小的合理数值。
16.外接电源:在正常过程中使用市电为该系统供电,但在地震来临的时候市电可能会出现大面积瘫痪;所以还需设置大功率发电机模组备用电源,在地震来临时自动切换至备用电源。第一线圈和第二线圈的供电方式有两种,采用单个电源供电或双电源供电。
17.单个电源供电:将缠绕在上内套管和下内套管上的两个线圈接通在arduino控制板上,再外接一个电源来进行工作。
18.双电源供电:将缠绕在下内套管的第一线圈接通在第一电源上,将上内套管上的第二线圈接通在第二电源上,再连接在arduino控制板,通过控制板反馈的数据来调节两个
电源的电流的大小来工作,其中电源一和电源二的型号功率一致,以保证二者工作频率同步。
19.当位移值增大,就会增大电流,根据电磁力公式的推导得出电流大小和电磁力成正比例关系,故增大的电流的大小,对应的电磁力的值也会增大,对应的减小电流的大小,电磁力也会对应的减小。例如初始电流为5a,若增大到10a,电流增大2倍,电磁力就会增大4倍来控制,电流增大和减小都是通过控制系统反馈的结果来随时调节。
20.电磁力的计算方式如下:根据麦克斯韦公式可知电磁力的计算公式为:(1)式中:dv为体积元;j为体积元内的电流密度;b为磁感应强度;f为电磁力。
21.经变换后电磁力计算公式为:
ꢀꢀ
(2)式中:n0为面积元的单位外法线。
22.如果电磁铁的铁芯的磁导率较大,为了得到磁导率较小的值,则(2)式可简化为:(3)根据具体电磁铁形状(3)式可简化为:(4)式中:μ0、μ1为空气和铁芯的磁导率(μ
1 》》μ0);s为磁极总面积;α为极面外法线与b1间的夹角。
23.将α=0代入上式(4)中可得麦克斯韦电磁力计算公式为:
ꢀꢀ
(5)式中μ0空气磁导率的系数为1.25
×
10-8
h/cm。
24.磁感应强度计算公式为:(6)式中:φ为磁通量密度。
25.磁通量密度的计算公式为:
ꢀꢀꢀ
(7)式中:i为绕组电流;n为绕组匝数;∧为气隙磁导。
26.气隙磁导的计算公式为: (8)式中:μ为各种介质的磁导率;δ为磁通管内半径;m为磁通管内外径差值;l为磁通管长度。
27.将式(7)、(8)式代入式(6)中得b的计算公式为:
ꢀꢀ
(9)将式(9)代入式(5)中得电磁铁磁力计算公式为:
ꢀꢀꢀꢀꢀꢀꢀ
(10)在设计基于电磁控制的屈曲约束支撑时,首先通过理论计算或样片试验获取该装置的最大承载力,并设定该装置上的最大吸力和最大斥力,根据最大吸力和最大斥力设计线圈长度、线径、线长参数,可通过式(10)计算获得。
28.本发明的有益效果在于:在传统的屈曲约束的基础上,通过电磁力的控制产生吸斥力来进行二次耗能,从而达到更好的减震效果,芯材的截面使用十字形,防屈曲失稳的性能更强;在传统的只使用一个外套管的基础上,本方案采用的下内套管和上内套管双上内套管的设计,有利于电磁产生吸力或者斥力来进行控制,也将传统的电磁铁进行改造使用了在套管外缠绕漆包线,芯材作为铁芯,套管为导磁材料的一种圆柱形电磁铁,线圈和控制系统相连接,在控制系统启动工作后根据传感器监测的数值进行控制,来防止主体结构发生大的破坏。
附图说明
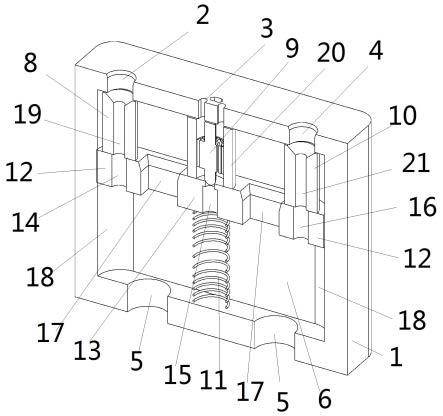
29.图1是本发明屈曲约束支撑件的结构示意图;图2是图1的断面图;图3是具体实施方式加载制度示意图;图4是ebrb1滞回曲线图;图5是ebrb2滞回曲线图;图6是ebrb3滞回曲线图;图7是ebrb4滞回曲线图;
图8是ebrb5滞回曲线图;图9是ebrb6滞回曲线图;图中:1-下内套管,2-上内套管,3-下支撑板,4-上支撑板,5-芯材,6-第一线圈,7-第二线圈,8-外套管,9-填充材料。
具体实施方式
30.下面结合附图对本发明作进一步说明:如图1~3所示,一种基于电磁控制的屈曲约束支撑系统,包括屈曲约束支撑件和控制系统。
31.屈曲约束支撑件包括上支撑板4、下支撑板3、芯材5和填充材料9,上支撑板4、下支撑板3为普通钢板,用于连接至建筑物上为建筑物提供支撑。芯材5的横断面一般为十字形、一字形、工字形或口字形,本发明优选十字形钢材;填充材料9沿芯材5的长度方向填充并包裹芯材5。
32.还包括下内套管1和上内套管2,下内套管1和上内套管2的长度均小于芯材5长度且下内套管1和上内套管2长度之和大于芯材5长度,下内套管1内径大于填充材料9外径,下内套管1内径大于上内套管2外径。下内套管1套设于填充材料9外且下端与下支撑板3固定连接,上内套管2套设于下内套管1外且上端与上支撑板4固定连接,芯材5位于下内套管1和上内套管2中心,上内套管2下端穿入至下内套管1上端中且穿入深度为10~20cm。下内套管1外壁沿长度方向缠绕有第一线圈6,上内套管2外壁沿长度方向缠绕有第二线圈7,下内套管1和上内套管2管壁叠合部位未缠绕第一线圈6和第二线圈7,第一线圈6和第二线圈7连接至电源。
33.还包括外套管8,外套管8起保护上内套管2和下内套管1的作用。外套管8的内径大于上内套管2外径,长度小于芯材5长度且大于芯材5一半长度;外套管8套设于下内套管1和上内套管2外,外套管8下端与下支撑板3固定连接,外套管8上端与上支撑板4之间的距离为20~30cm。
34.控制系统包括上位机、arduino控制板、位移传感器,位移传感器用于监测屈曲约束支撑件的振动幅度,上位机分别与位移传感器、arduino控制板信号连接,arduino控制板与电源信号连接并用于控制电源;位移传感器产生正位移且大于设定的安全位移阈值时,下内套管1和上内套管2之间产生电磁吸力;位移传感器产生负位移且大于设定的安全位移阈值时,下内套管1和上内套管2之间产生电磁斥力。
35.为了方便线圈散热,第一线圈6和第二线圈7外涂覆有绝缘导热材料;为了固定及保护第一线圈6和第二线圈7,下内套管1和上内套管2的外壁均包裹有橡胶层,第一线圈6和第二线圈7均包裹于橡胶层中。
36.一、本发明下内套管1和上内套管2设计:采用双套管作为ebrb的内部单元是为了在加入控制系统和在电磁力的作用下产生相吸和相斥的力,来约束ebrb的产生较大的变形并增大ebrb的耗能能力。根据对不同形状的电磁铁进行仿真得出圆柱形电磁铁在同等条件下产生的电磁力最大,故ebrb的下内套管1和上内套管2均采用圆柱形套管而不采用长方形的套管。电磁控制的屈曲约束支撑的下内套管1和上内套管2均采用q235钢,q235钢具有以下优点:
(1)q235钢材具有较好的韧性和强度;(2)q235钢作为一种低屈服钢材,造价成本较低,价格低廉;所以选取q235钢作为内外套管8的材料。
37.二、芯材5设计一般的brb的芯材5的截面形式有一字行、h行、十字形、口字形四种。十字形截面和其他截面相比更稳定,并在下内套管1和芯材5间留有间隙,使十字形芯材5能满足组装要求。本方案中的十字行芯材5所用的材料为q235钢或电工纯铁(dt4)。q235钢作为一种低屈服钢材有一定的磁导率,磁导率为200-400h/m(亨每米);dt4有较多的等级,本文所用的是dt4(一级),dt4是一种含碳量小于0.025%的一种合金、是一种使用较多的电磁铁的铁芯的材料。电工纯铁有以下的优点:(1)电磁各种性能较好,具有较低的矫顽力,具有较高的导磁率;(2)钢的纯度高,电磁纯铁系列钢的材质均为镇静钢;(3)纯铁的冷、热加工性能较好。
38.三、无粘结材料及绝缘导热材料设计无粘结材料是一种来减少约束单元和芯材5之间相互摩擦的一种材料,具有较多的类型,本文所使用的无粘结材料是氮化硼,因为氮化硼具有耐高温、不黏结、抗腐蚀等特性,既能满足作为无粘结材料来进行使用,也保障了电磁铁在工作时产生较高的温度而出现的短路或者漏磁漏电现象。为了防止出现类似的情况,在十字形芯材5上还涂抹绝缘导热材料,因其具有较高的热导率和绝缘性、较好的粘结性、在高温使用等优异特性。本文使用的绝缘导热胶粘剂是将酚醛环氧f-15作为基体,并加入活性增韧剂py-30、固化剂甲基纳迪克酸酐(mena)、促进剂dmp-30、及氮化硼、氮化铝、氧化铝的混合填料,绝缘导热胶粘剂的配合比如下表所示。
39.绝缘导热胶粘剂配合比表四、控制系统的设计结构振动控制分为被动控制、主动控制、半主动控制、混合控制和智能控制。半主动控制通过各种传感器监测的数据反馈给控制系统,能有效使消能减隔震装置的工作。半主动控制近年来已逐步在土木工程领域得到较多的关注。本文所采用的是pso-lqr半主动控制方法。
40.五、线圈的直径设计根据线圈电阻计算公式,可以计算出理想的线圈直径值,因此线圈电阻计算公式为: (11)式中: ρ为铜的电阻率值为;s
漆
为漆包线截面面积;
l为绕漆包线长度。
41.在电阻r已知及所需漆包线的总长度已知的情况下,可求出所需漆包线的截面面积。本文中所用的漆包线的直径均为3mm。
42.六、试件的设计根据《tj屈曲支撑设计手册》来对芯材5进行设计,芯材5应满足以要求:(1)为了满足需要,屈曲约束支撑核心单元的材料长度应根据设计要求来计算屈曲约束支撑芯材5的长度;(2)根据竖向门式加载架的最大加载荷载,进行计算芯材5的面积;(3)芯材5要有足够大的截面面积来进入塑性阶段,从而满足更好的耗能能力。
43.七、基于电磁控制的屈曲约束支撑(ebrb)的拟静力试验共设计6组实验,试件编号分别为(ebrb1-ebrb6)。其中试件的总长度为1400mm,具体尺寸如下表所示:
根据《建筑抗震设计规范》,采用位移加载,具体位移加载的幅值为,其中l=1400mm,每个位移幅值加载2周,加载制度如图3所示。
44.实验数据滞回曲线是衡量结构减震性能的重要因素之一,是对消能减隔震性能最直观的反映,同时滞回曲线也是反映各项性能的基础,充分反映了构件在不同阶段的变形特征。各构件的滞回曲线如图4-9所示。
45.采用双套管作为ebrb的内部单元,可以看出所有试件的滞回曲线形状非常饱满,与加入控制系统及电磁力的ebrb相比,为典型的梭行,饱满程度有明显提高,没有明显的紧缩, 反映了加入控制系统及电磁力的构件的塑性变形能力很强,有较好的减震性能。试件在加载位移较小时,试件处于弹性阶段,随着位移的增大,试件逐步屈服,试件的刚度也有所降低。
46.由图5可以看出试件在拉压阶段均有明显滑移,由于试件连接板和加载端的板子较薄故出现相对滑移,在对其余板子进行加固后,滑移现象明显降低,由图8和9可以看出在加入控制系统及电磁力的情况下,由于开始电流的不稳定导致在控制系统启动后荷载出现上下波动的情况,在后期电流稳定后,荷载上下跳动现象好转。滞回曲线未出现明显的下降段,具有较好的耗能性。由电磁力计算公式可知在计算理论电磁力的值和试验中电磁的磁力值的差值在8%之内,可以看出在同样的填充材料9,不同芯材5及通控制系统及加入电磁力的情况下,使用q235钢作为芯材5的滞回环和使用dt4的滞回环相差不大,这是由于dt4磁性比q235钢的磁性强,产生的电磁力大所以使二者的滞回环面积相差不大。在经济实惠的角度看使用q235钢作为芯材5产生的电磁力没有dt4作为芯材5的电磁力大,但最终的滞回环的面积基本一致。可以选用q235钢作为芯材5成本较低。由图4和5可以看出在同样的填充材料9下,使用q235钢为芯材5的构件的滞回曲线更饱满,这是由于q235钢的抗拉及抗压强度均为dt4的2倍;由图4和6可知在使用相同芯材5的情况下,填充材料9为lc30的构件的比填充材料9为c30的构件的滞回曲线更饱满,这是由于使用lc30作为填充材料9,质量较轻,并且为ebrb提供较大的轴向力,弹性模量比c30小。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。