1.本发明属于虚拟现实、路径规划技术领域,具体地说,涉及一种基于地标特征与摄影构图手法的虚拟漫游路径规划方法。
背景技术:
2.虚拟漫游(virtual roaming)是虚拟现实领域的重要分支,由于其特有3i特性——沉浸感(immersion)、交互性(interactivity)和构想性(imagination),被广泛地应用在建筑、旅游、游戏、航空航天、医学等多种行业。尤其在旅游行业,近年来随着旅游业的火热发展,在宣传、介绍旅游景点时越来越广泛的使用了虚拟景点。而漫游功能作为虚拟景点中的重要的功能之一,自然而然成为人们研究的重点。为使浏览者了解真实的景点环境且能够浏览到足够赏心悦目的风景,需进行路径规划。
3.目前,传统的路径规划算法只追求空间距离短,如cn114371711a的发明专利申请文献公开的一种机器人编队避障路径规划方法。但这样生成的路径只是空间距离上的短,而在介绍旅游景点时,这样生成路径并非是用户真正感兴趣的,也并不能够展现景区的特色。为使游客可以欣赏到更多赏心悦目的风景,需要对漫游路径进行改进。
技术实现要素:
4.本发明的第一个目的是针对现有技术的不足,提供一种基于地标特征与摄影构图手法的虚拟漫游路径规划方法,可以将景点地标特征与摄影构图手法相结合,得到一条风景值较高、过渡自然且路径较短的漫游路径。
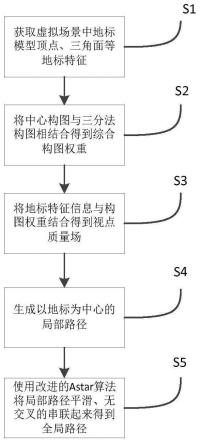
5.为了实现上述目的,本发明提供的基于地标特征与摄影构图手法的虚拟漫游路径规划方法,包括以下步骤:
6.s1:获取虚拟场景中地标模型的地标特征,所述地标特征包括地标模型的顶点特征;
7.作为优选,所述的虚拟场景中的地标指的是地方具有独特地理特色的建筑物或者自然物,例如摩天大楼、教堂、寺庙、雕像、灯塔、桥梁等。
8.作为优选,所述的地标模型的顶点特征指的是地标模型前后左右四个方向上顶点的世界坐标,并转化为视口坐标。
9.作为优选,所述地标特征还包括地标模型的三角面特征。
10.s2:将摄影构图手法中的中心构图与三分法构图相结合得到综合构图权重;
11.中心构图手法是将权重值较高的设置在中心区域,起到突出主体和画面左右平衡的效果;具体是将虚拟相机画面中间区域权重设为a(a=1),其他部分设为b(b=-1),以实现将目标限制在画面中心位置。
12.三分法构图手法是将虚拟相机画面横竖均分为九份,将画面中横竖分割线上权重设为a(a=1),其他部分设为b(b=-1),以实现将目标限制在横竖分割线上位置。
13.本发明采用中心构图与三分法构图相结合获取综合构图权重i
β
,具体通过以下方
法获取:
14.将虚拟相机画面横竖均分为九份,将画面中横竖分割线上权重设为a,且将画面的中心区域权重设为a,画面的边界部分权重设为b,其他部分称之为过渡区域;
15.过渡区域的权重β计算如下:
[0016][0017]
其中da表示过渡区域到权重为a位置的最近距离,db到表示过渡区域到权重为b位置的最近距离。
[0018]
s3:将地标特征与综合构图权重结合形成基于地标的视点质量场;
[0019]
作为优选,所述将地标特征与综合构图权重结合形成基于地标的视点质量场;具体是:
[0020]
根据视点质量场的两个约束条件即四个方向的地标特征qm(v)与构图权重i
β
,计算模型四个方向的视点质量分数ω:
[0021]
ω=qm(v)
·iβ
[0022]
其中m表示模型m,v表示顶点v,代表不同方向;
[0023]
将模型四个方向的视点质量分数ω按照前后左右四个方向整合后得到最终的以地标为中心的视点质量场。
[0024]
s4:选取部分视点质量场内的视点并串联成以地标为中心的局部路径;
[0025]
作为优选,所述的局部路径由视点质量场内部分视点连接而成,且加入bezier插值法使路径更为平滑;
[0026]
p=(1-t)2p0 2t(1-t)p1 t2p2[0027]
其中p0、p1、p2是局部路径上的三个点,p0′
是由p0运动到p1,p1′
是由p1运动到p2,p是由p0′
运动到p1′
,当t从0到1线性变化时,三个点同时出发,p点就会慢慢地从p0′
(此时t=0)运动到p1′
(此时t=1),p点的运动轨迹即为bezier路径。
[0028]
s5:使用改进的astar寻路算法将每一个局部路劲平滑、无交叉的连接起来形成全局路径。
[0029]
作为优选,所述的全局路径是将虚拟场景内每一个局部路径有序、无交叉的串连起来,且使用改进的astar寻路算法减少冗余路径使生成的路径相对较短;具体如下:
[0030]
step 1:将虚拟场景划分为n个一样大小的网格。
[0031]
step2:对每个网格做如下操作:
[0032]
2-1比较每个地标到预设定的起始点的距离d,将距离起始点最短的地标,设为目标点。
[0033]
2-2采用以下公式计算距离总代价,生成一条距离总代价最小的路径,并将目标点设为起始点。
[0034]
f(n)=g(n) h(n)
[0035]
其中f(n)为距离总代价,g(n)为当前位置到起点的距离,h(n)为当前位置到目标点的距离;
[0036]
2-3如果地标全部搜索完成,则结束。否则重复2-1,且已经搜索到的地标,不参与
下一次执行过程。
[0037]
本发明的第二个目的是提供基于地标特征与摄影构图手法的虚拟漫游路径规划装置,包括:
[0038]
特征获取模块,获取虚拟场景中地标模型的地标特征;
[0039]
综合构图权重计算模块,用于将摄影构图手法中的中心构图与三分法构图相结合得到综合构图权重;
[0040]
视点质量场构建模块,用于将地标特征与综合构图权重结合形成基于地标的视点质量场;
[0041]
局部路径形成模块,用于选取部分视点质量场内的视点并串联成以地标为中心的局部路径;
[0042]
全局路径形成模块,用于使用改进的astar寻路算法将每一个局部路径平滑、无交叉的连接起来形成全局路径。
[0043]
本发明的第三个目的是提供一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行上述的方法。
[0044]
本发明的第四个目的是提供一种计算设备,包括存储器和处理器,所述存储器中存储有可执行代码,所述处理器执行所述可执行代码时,实现所述的方法。
[0045]
本发明的有益之处在于:提供的基于地标特征与摄影构图手法的虚拟漫游路径规划方法,该方法生成的路径不再追求空间距离的上的短,通过地标的特征信息与摄影手法中的中心构图与三分法构图,构建了一个以地标为中心的视点质量场用于引导局部虚拟相机运动,同时加入bezier插值法,使得生成的路径更加平滑,最后使用改进的astar算法将一个个局部路径无交叉的串联起来,形成一条用户感兴趣的虚拟漫游路径。本发明方法具有较好的实用性与适用性,使得游客可以在较短的时间里,观察了解到更多的景区风景,具有非常广泛的应用前景。
附图说明
[0046]
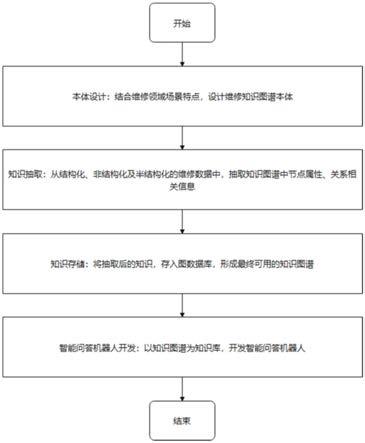
图1为本发明实施例中基于地标特征与摄影构图手法的虚拟漫游路径规划方法的流程图;
[0047]
图2为本发明实施例中地标特征信息获取示意图,其中(a)初始模型,(b)三角面及顶点,(c)模型顶点信息;
[0048]
图3为本发明实施例中摄影构图手法中的中心构图与三分法构图相结合得到综合构图权重示意图,其中(a)中心构图权重图,(b)三分法构图权重图,(c)综合构图权重图,(d)本发明构图权重图;
[0049]
图4为本发明实施例中基于地标的视点质量场示意图,其中(a)前面视点质量分数,(b)后面视点质量分数,(c)左面视点质量分数,(d)右面视点质量分数,(e)整个视点质量场;
[0050]
图5为本发明实施例中生成的以地标为中心的局部路径示意图,其中(a)直接生成,(b)加入bezier插值算法;
[0051]
图6为本发明实施例中使用本发明方法生成的全局路径示意图;
[0052]
图7为不同景区场景的实验结果,其中(a)场景一,(b)场景二,(c)场景三。
[0053]
图8为调查问卷的结果。
具体实施方式
[0054]
为使本发明的目的、技术方案和优点更加清楚,以下结合实施例及其附图对本发明作进一步说明。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0055]
实施例
[0056]
参见图1,本实施例中基于地标特征与摄影构图手法的虚拟漫游路径规划方法包括:
[0057]
步骤s1,获取虚拟场景中地标模型的顶点、三角面等地标特征信息。本实施例中地标指的是地方具有独特地理特色的建筑物或者自然物,例如摩天大楼、教堂、寺庙、雕像、灯塔、桥梁等。所述的地标模型的顶点特征信息,指的是模型前后左右四个方向上顶点的世界坐标并最后转化为视口坐标。
[0058]
虚拟场景中的模型是由顶点组成三角片,再由三角片组成整个外观可见的多个数据集合,因此本发明将三角面交汇处即顶点处作为该模型的显著性区域,如图2所示,对于每个模型m,在不同顶点v处所获取到的地标特征不同,记每个顶点v处的地标特征质量记为qm(v)。图2(c)是在虚拟场景中通过模型的mesh获取到模型的顶点特征示意图,作为视点质量场的约束条件之一。
[0059]
步骤s2,将摄影构图手法中的中心构图与三分法构图相结合得到综合构图权重,如图3所示。
[0060]
中心构图手法是将权重值较高的设置在中心区域,起到突出主体和画面左右平衡的效果。具体地做法如下:将画面中间区域权重设为a=1,其他部分设为b=-1,通过计算严格将物体限制在画面中心位置。
[0061]
三分法构图手法是将将画面横竖均分为九份,将画面中横竖分割线上权重设为a,其他部分设为b。
[0062]
为了得到美观的视觉效果,本发明利用摄影手法将中心区域构图与三分法构图(将图像分为九个部分,在垂直和水平交点的位置放置特征信息)相结合得到一个综合构图权重。
[0063]
首先定义一个构图权重图i
β
,将权重较高的值设置在中心白色区域(图3(a))和三分线处即垂直与水平分隔线上,如图3(b)所示。以中心构图为例,将中心白色区域权重设为a=1,其他部分设为b=-1,如图3(a)所示。同样,三分法构图则将处于垂直与水平分隔线上的权重设为a,其他部分设为b。本发明将这两种构图方式相结合得到一个综合构图权重图,如图32(c)所示,将地标的显著性特征点尽可能放置在中心以及三分线区域,用于提升视觉观感。
[0064]
但在实际操作中,若采用图3(c)这种构图方式,为了使目标尽可能处在中心区域,会使得虚拟相机处在非常远的位置。因此本发明对综合构图法进行了改进,如图3(d)所示,将白色区域权重值设为a(a》0),黑色区域权重值设为b(b《0),而在白色到黑色的过渡区域,首先计算到最近的白色区域的距离da,和到最近的黑色区域的距离db,然后利用公式(1)计
算过渡区域的权重β。
[0065]
即将画面中心区域或者横竖分割线上权重设为a,边界部分权重设为b,而在之间的过渡区域,首先计算到最近的权重为a的距离,和到最近权重为b的距离,然后利用以下公式计算过渡区域的权重β。
[0066][0067]
步骤s3,将地标特征与综合构图权重结合形成基于地标的视点质量场,如图4所示。
[0068]
本实施例中,视点质量场既符合地标特征,又满足构图权重,且是由前后左右四个方向组成的环绕场。根据视点质量场的两个约束条件即四个方向的地标特征qm(v)与构图权重i
β
,计算模型四个方向的视点质量分数ω:
[0069]
ω=qm(v)
·iβ
[0070]
其中m表示模型m,v表示顶点v,代表不同方向;
[0071]
将模型四个方向的视点质量分数ω按照前后左右四个方向整合在一起得到最终的以地标为中心的视点质量场。
[0072]
图4为本发明实施例中基于地标的视点质量场示意图;(a)前面视点质量分数,(b)后面视点质量分数,(c)左面视点质量分数,(d)右面视点质量分数,(e)整个视点质量场。
[0073]
步骤s4,生成以地标为中心的局部路径,如图5所示。
[0074]
本实施例中,局部路径由视点质量场内部分视点连接而成,且加入bezier插值法使路径更为平滑。
[0075]
具体做法如下:p0、p1、p2是局部路径上的三个点,p0′
是由p0运动到p1,p1′
是由p1运动到p2,p是由p0′
运动到p1′
,当t从0到1线性变化时,三个点同时出发,p点就会慢慢地从p0′
(此时t=0)运动到p1′
(此时t=1),p点的运动轨迹即为bezier路径,计算公式如下所示。
[0076]
p=(1-t)2p0 2t(1-t)p1 t2p2[0077]
步骤s4,使用改进的astar寻路算法将每一个局部路劲平滑、无交叉的串联起来形成本发明的全局路径,如图6所示。
[0078]
本实施例中,全局路径是将虚拟场景内每一个局部路径有序、无交叉的串连起来,且使用改进的astar寻路算法减少冗余路径使生成的路径相对较短。
[0079]
具体做法如下:在最短路径的问题上,astar寻路算法具有良好的表现,因此本发明的全局路径采用改进的astar寻路算法。计算公式如下所示:g(n)为当前位置到起点的距离,h(n)为当前位置到目标点的距离,两者相加得到一个距离总代价,每走一步计算一步,每次取总代价最小的作为下一个节点,直至找到目标点。
[0080]
f(n)=g(n) h(n)
[0081]
由于astar算法是求两个点之间的最短距离,而本发明中的地标可能要多于2个,因此需要改进astar算法。
[0082]
改进的算法步骤为:
[0083]
step 1:将目标场景划分为n个一样大小的网格。
[0084]
step 2:比较每个地标到起始点的距离d,将距离起始点最短的地标,设为目标点。
[0085]
step 3:采用上述公式生成一条到目标点的路径,并将目标点设为起始点。
[0086]
step 4:如果地标全部搜索完成,则结束。否则重复step 2,且已经搜索到的地标,不参与下一次执行过程。
[0087]
实验结果与分析
[0088]
为了在宣传旅游景点时得到一条游客感兴趣且可以最大程度展现景区特色的虚拟漫游路劲,本发明将地标的显著性特征与摄影构图手法相结合,构造以地标为中心的视点质量场,进而引导局部相机运动,最后使用改进的astar自动寻路算法,将局部路径平滑的串联起来。该方法得到的虚拟漫游路径,在保证实时性的前提下,能够很好的展现景点的景色,且路径较短,具有较高的拟合精度。
[0089]
为验证本发明方法的有效性,选取了图7三个场景进行试验。图中曲线为本发明方法生成的地标为中心的用户感兴趣路径。场景一为某园林,由表1可知场景一设定了3个地标,生成的虚拟漫游路径长度为219.04m;场景二为某宋城景区,设定了2个地标,总路径长度为22.40m;场景三为某游乐园场景,设定了4个地标,总的路径长度为256.21m。由于游客可自行进行加减速操作,因此在游览时间方面比较灵活,本发明不作设定。
[0090]
表1不同场景的路径长度及设定的地标个数
[0091][0092]
为进一步验证本发明方法的实用性和游客的真实感受。我们邀请了15位同学对生成漫游路径进行体验与评价。这15名同学(8男7女),年龄在20-24岁(均值22.0,标准差1.0),视力处于或矫正至正常水平,身体都是健康水平。为保证测试条件和过程的一致性,受邀参与测试的志愿者均为计算机相关专业的在校大学生,都了解或接触过虚拟现实,且均为右利手用户。
[0093]
评价内容如表2所示,分数按照7级李克特表进行打分(1为非常不满意,7为非常满意)。图8显示了调查问卷的结果,其中q1-q5分别表示5个问题,m表示均值,sd表示标准差。
[0094]
q1展示了生成的漫游路径对于游客的舒适性,m=5.27,sd=0.96,说明了大部分实验者认同本发明方法生成的路径,具有一定的实用性,但依旧存在着少部分对生成的路径表示不太舒服。据部分实验者反应虚拟景点与现实情况还是存在差异,感觉不是很真实。
[0095]
q2展示了生成的漫游路径对于展现地标的适用性,m=5.13,sd=0.99,说明了超过半数的实验者认为本发明方法生成的路径可以展示出地标的特征,这也是笔者的研究初衷,为以后的深入研究打下很好的基础。
[0096]
q3展示了地标之间的过渡衔接,m=5.86,sd=0.63,这是所有问题中得分最高的问题,大家一致认为在过渡阶段比较自然,得到了大部分人的肯定,在以后的工作中应继续保持。
[0097]
q4展示了生成的漫游路径的平滑性,m=4.40,sd=1.12,反映了实验者对于轨迹平滑度方面存在争议,可能是因为每个人的主观感受不同,据部分实验者反应,在地标的局
部路径较为平滑,在全局路径的部分上感受比较差,在未来的工作中应加强对于路径整体平滑度,要考虑整体性。
[0098]
q5展示了本发明方法对于游客的接受度,m=5.20,sd=0.86,反映了大家对于本发明的方法比较接受,尤其是可以在较短的时间里了解到景区的风景,有一定实用性和适用性,这也为我们广泛推广应该提供了可能性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。