1.本发明涉及超精密位移测量技术领域,特别涉及一种二维光栅位移测量装置。
背景技术:
2.光栅位移测量系统以光栅栅距为测量基准,消除了激光波长变化带来的误差影响,由于光栅位移测量系统对环境稳定性要求低、成本低廉、结构简单,所以广泛应用于航天航空、半导体加工制造、超精密加工等领域。随着工业技术的迅速发展,加工制造过程中对超精密位移测量技术的测量维度、测量速度、测量精度、测量范围等方面的要求越来越高。
3.目前,随着高刻划精度光栅制造技术的提高和光栅拼接技术的完善,光栅位移测量朝着更高的测量精度和更广的测量维度发展。为了达到更高精度的测量,较为广泛的操作方式是多加一路测量信号,来实现多维度测量。除此之外,也可以采用不同的转折器件进行多次衍射来实现高倍细分测量,其中最常见的方式就是在光路中添加直角棱镜、角锥棱镜等。
4.国内外光栅位移测量系统中多采用传统的四步相移结构,一个作为参考光栅,一个作为测量光栅,两两衍射光在偏振分光棱镜处进行干涉,虽然降低了成本但是增加了光栅测量系统的体积,而且测量精度受限。
技术实现要素:
5.鉴于上述问题,本发明的目的是提出一种二维光栅位移测量装置,本发明对激光功率波动和杂散光不敏感,可以更容易地对处在快速移动的目标进行测量,实现对二维光栅三个维度上的位移测量。提高了光栅位移测量系统的稳定性和精度,使得读数头的结构更加简便与灵活。
6.为实现上述目的,本发明采用以下具体技术方案:
7.本发明提供一种二维光栅位移测量装置,包括:第一激光器系统、第二激光器系统、光束折转系统、二维衍射光栅、第一信号处理系统和第二信号处理系统;
8.第一激光器系统和第二激光器系统用于发出具有频差的正交线偏振光束,线偏振光束经过光束折转系统被分为八束光束,其中的四束光束经过光束折转装置的折射后以littrow角度入射至二维衍射光栅中得到四束衍射光束;四束衍射光束分别与另外四束光束分别发生干涉后形成四路干涉信号;
9.第一信号处理系统和第二信号处理系统分别用于对四路干涉信号进行处理,实现单次衍射的两倍细分三维位移测量。
10.优选地,
11.光束折转系统用于将线偏振光束分为互相垂直的第一光束和第二光束、互相垂直的第三光束和第四光束、互相垂直的第五光束和第六光束、互相垂直的第七光束和第八光束;
12.第一光束和第三光束、第五光束和第七光束经过光束折转系统的折射后以littrow角度入射至二维衍射光栅中分别得到第一 1级衍射光束和第一-1级衍射光束、第二 1级衍射光束和第二-1级衍射光束。
13.优选地,
14.第一 1级衍射光束与第二光束发生干涉后形成第一路干涉信号;
15.第一-1级衍射光束与第四光束发生干涉后形成第二路干涉信号;
16.第二 1级衍射光束与第六光束发生干涉后形成第三路干涉信号;
17.第二-1级衍射光束与第八光束发生干涉后形成第四路干涉信号;
18.第一信号处理系统用于对第一路干涉信号和第二路干涉信号进行处理,第二信号处理系统用于对第三路干涉信号和第四路干涉信号进行处理,实现单次衍射的两倍细分三维位移测量。
19.优选地,
20.第一 1级衍射光束与第四光束发生干涉后形成第一路干涉信号;
21.第一-1级衍射光束与第二光束发生干涉后形成第二路干涉信号;
22.第二 1级衍射光束与第八光束发生干涉后形成第三路干涉信号;
23.第二-1级衍射光束与第六光束发生干涉后形成第四路干涉信号;
24.第一信号处理系统用于对第一路干涉信号和第二路干涉信号进行处理,第二信号处理系统用于对第三路干涉信号和第四路干涉信号进行处理,实现单次衍射的两倍细分三维位移测量。
25.优选地,
26.第一激光器系统包括:第一双频激光器、第一分光棱镜和第一平面反射镜;
27.第一双频激光器用于发出一束具有频差的正交线偏振光束,线偏振光束垂直入射至第一分光棱镜中,第一分光棱镜将线偏振光束分为互相垂直的第一反射光束和第一透射光束;
28.第二激光器系统包括:第二双频激光器、第二分光棱镜和第三平面反射镜;
29.第二双频激光器用于发出一束具有一定频差的正交线偏振光束,线偏振光束垂直入射至第二分光棱镜中,第二分光棱镜将线偏振光束分为互相垂直的第二反射光束和第二透射光束。
30.优选地,光束折转系统包括:第一偏振分光棱镜;
31.第一反射光束被第一偏振分光棱镜分为互相垂直的第一光束和第二光束;
32.第一透射光束经第一平面反射镜的反射后垂直入射至第一偏振分光棱镜中,第一偏振分光棱镜将第一透射光束分为互相垂直的第三光束和第四光束;
33.第二反射光束被第一偏振分光棱镜分为互相垂直的第五光束和第六光束;
34.第二透射光束经第三平面反射镜的反射后垂直入射至第一偏振分光棱镜中,第一偏振分光棱镜将第二透射光束分为互相垂直的第七光束和第八光束。
35.优选地,光束折转系统还包括:第一折光装置;第一折光装置包括:第一四分之一波片和折射棱镜;
36.第一光束和第三光束经过第一四分之一波片的透射和折射棱镜的折射后,以littrow角度入射至二维衍射光栅中衍射后分别得到第一 1级衍射光束和第一-1级衍射光
束,第一 1级衍射光束和第一-1级衍射光束沿着入射光路径原路返回,依次经过折射棱镜的折射和第一四分之一波片的透射后,再次垂直入射至第一偏振分光棱镜中;
37.第五光束和第七光束经过第一四分之一波片的透射和折射棱镜的折射后,以littrow角度入射至二维衍射光栅中衍射后分别得到第二 1级衍射光束和第二-1级衍射光束,第二 1级衍射光束和第二-1级衍射光束沿着入射光路径原路返回,依次经过折射棱镜的折射和第一四分之一波片的透射后,再次垂直入射至第一偏振分光棱镜中。
38.优选地,光束折转系统还包括:第二折光装置,第二折光装置包括:第二四分之一波片和二次反射棱镜;
39.第二光束和第四光束经第二四分之一波片的透射和二次反射棱镜的两次反射后,第二光束和第四光束的传播方向改变180
°
,再次经过第二四分之一波片的透射后垂直入射至第一偏振分光棱镜中;
40.第六光束和第八光束经第二四分之一波片的透射和二次反射棱镜的两次反射后,第六光束和第八光束的传播方向改变180
°
,再次经过第二四分之一波片的透射后垂直入射至第一偏振分光棱镜中。
41.优选地,第一信号处理系统包括:第二平面反射镜、第二偏振分光棱镜、第一光电探测器和第二光电探测器;
42.第一 1级衍射光束经第一偏振分光棱镜的反射后,依次经第二平面反射镜的反射和第二偏振分光棱镜的反射后进入第一光电探测器;
43.第二光束经第一偏振分光棱镜的透射后,经第二偏振分光棱镜的透射后进入第一光电探测器;
44.第一-1级衍射光束经第一偏振分光棱镜的反射后,经第二偏振分光棱镜的反射后进入第二光电探测器;
45.第四光束经第一偏振分光棱镜的透射后,依次经第二平面反射镜的反射和第二偏振分光棱镜的透射后进入第二光电探测器。
46.优选地,第二信号处理系统包括:第四平面反射镜、第三偏振分光棱镜、第三光电探测器、第四光电探测器;
47.第二 1级衍射光束经第一偏振分光棱镜的反射后,依次经第四平面反射镜的反射和第三偏振分光棱镜的反射后进入第三光电探测器;
48.第六光束经第一偏振分光棱镜的透射后,经第三偏振分光棱镜的透射后进入第三光电探测器;
49.第二-1级衍射光束经第一偏振分光棱镜的反射后,经第三偏振分光棱镜的反射后进入第四光电探测器;
50.第八光束经第一偏振分光棱镜4的透射后,依次经第四平面反射镜的反射和第三偏振分光棱镜的透射后进入第四光电探测器。
51.优选地,第一信号处理系统包括:第一光电探测器和第二光电探测器;
52.第一 1级衍射光束经第一偏振分光棱镜的反射后,进入第一光电探测器;
53.第二光束经第一偏振分光棱镜的透射后,进入第二光电探测器;
54.第一-1级衍射光束经第一偏振分光棱镜的反射后,进入第二光电探测器;
55.第四光束经第一偏振分光棱镜的透射后,进入第一光电探测器。
56.优选地,第二信号处理系统包括:第三光电探测器和第四光电探测器;
57.第二 1级衍射光束经第一偏振分光棱镜的反射后进入第三光电探测器;
58.第六光束经第一偏振分光棱镜的透射后,进入第四光电探测器;
59.第二-1级衍射光束经第一偏振分光棱镜的反射后,进入第四光电探测器;
60.第八光束经第一偏振分光棱镜的透射后,进入第三光电探测器。
61.优选地,当衍射光栅沿矢量x、y或z方向发生移动时,根据多普勒频移求解四束衍射光束的相位变化量,并结合littrow入射的光栅方程得到衍射光栅沿矢量x、y或z方向移动的位移量;littrow入射的光栅方程如下:
62.m
l
sinθ
mn
cosφ
mn
=sinθcosφ mλ/d
x
;n
l
sinθ
mn
sinφ
mn
=sinθsinφ nλ/dy;
63.δz=z
·
cosθ
64.其中,m
l
、n
l
为不同介质中的折射率,m、n为二维衍射光栅的x栅向和y栅向的两个衍射级,θ为衍射光束的衍射角度变化,为衍射光束相对于二维衍射光栅入射面的方位角变化,λ为入射光束波长变化,d
x
、dy为二维衍射光栅的光栅常数,δz为z方向位移实际测量值,z为沿littrow角入射方向的光程改变量。
65.与现有的技术相比,本发明对激光功率波动和杂散光不敏感,可以更容易地对处在快速移动的目标进行测量,实现对二维光栅三个维度上的位移测量。提高了光栅位移测量系统的稳定性和精度,使得读数头的结构更加简便与灵活。
附图说明
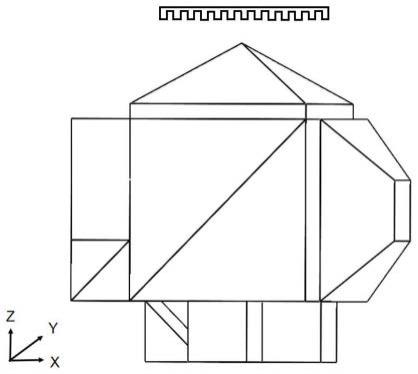
66.图1是根据本发明实施例提供的二维光栅位移测量装置的结构示意图。
67.图2是根据本发明第一实施例提供的二维光栅位移测量装置的光路x方向示意图。
68.图3是根据本发明第一实施例提供的二维光栅位移测量装置的光路y方向示意图。
69.图4是根据本发明第二实施例提供的二维光栅位移测量装置的光路示意图。
70.图5是根据本发明第二实施例提供的二维光栅位移测量装置的光路x方向示意图。
71.图6是根据本发明第二实施例提供的二维光栅位移测量装置的光路y方向示意图。
72.图7是根据本发明实施例提供的二维光栅位移测量装置的衍射光束交叉传输原理示意图。
73.图8是根据本发明实施例提供的二维光栅位移测量装置的衍射光束分离传输原理示意图。
74.图9是根据本发明实施例提供的二维光栅位移测量装置的法线方向位移测量示意图。
75.其中的附图标记包括:
76.第一双频激光器1、第一分光棱镜2、第一平面反射镜3、第一偏振分光棱镜4、第一四分之一波片5、折射棱镜6、衍射光栅7、第二四分之一波片8、二次反射棱镜9、第二平面反射镜10、第二偏振分光棱镜11、第一光电探测器12、第二光电探测器13;
77.第二双频激光器14、第二分光棱镜15、第三平面反射镜16、第四平面反射镜17、第三偏振分光棱镜18、第三光电探测器19、第四光电探测器20;
具体实施方式
78.在下文中,将参考附图描述本发明的实施例。在下面的描述中,相同的模块使用相同的附图标记表示。在相同的附图标记的情况下,它们的名称和功能也相同。因此,将不重复其详细描述。
79.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
80.图1示出了根据本发明实施例提供的二维光栅位移测量装置的结构。
81.图2示出了根据本发明第一实施例提供的二维光栅位移测量装置的x方向光路图。
82.图3示出了根据本发明第一实施例提供的二维光栅位移测量装置的y方向光路图。
83.如图1-3所示,本发明第一实施例提供的二维光栅位移测量装置包括:第一激光器系统、第二激光器系统、光束折转系统、衍射光栅7、第一信号处理系统和第二信号处理系统。xyz坐标满足右手坐标系。
84.第一激光器系统包括:第一双频激光器1、第一分光棱镜2和第一平面反射镜3。
85.第一双频激光器1发出一束具有一定频差的正交线偏振光束垂直入射至第一分光棱镜2中,第一分光棱镜2将线偏振光束分为互相垂直的反射光束和透射光束。
86.光束折转系统包括:第一偏振分光棱镜4、第一折光装置、第二折光装置。
87.反射光束垂直入射至第一偏振分光棱镜4中,第一偏振分光棱镜4将反射光束分为互相垂直的第一光束和第二光束。
88.透射光束经第一平面反射镜3的反射后垂直入射至第一偏振分光棱镜4中,第一偏振分光棱镜4将透射光束分为互相垂直的第三光束和第四光束。
89.第一光束与反射光束互相平行,第二光束与反射光束互相垂直。
90.第三光束与透射光束互相平行,第四光束与透射光束互相垂直。
91.第一光束和第三光束透过第一偏振分光棱镜4后垂直入射至第一折光装置中。第一折光装置包括:第一四分之一波片5和折射棱镜6。
92.第一光束和第三光束经过第一四分之一波片5的透射和折射棱镜6的折射后,以littrow角度入射至衍射光栅7中衍射后分别得到第一 1级衍射光束和第一-1级衍射光束,第一 1级衍射光束和第一-1级衍射光束沿着入射光路径原路返回,依次经过折射棱镜6的折射和第一四分之一波片5的透射后,再次垂直入射至第一偏振分光棱镜4中。经过第一偏振分光棱镜4的反射后进入第一信号处理系统中被接收。
93.第二光束和第四光束分别经过第一偏振分光棱镜4的反射后垂直入射至第二折光装置中。第二折光装置包括:第二四分之一波片8和二次反射棱镜9。
94.第二光束和第四光束经第二四分之一波片8的透射和二次反射棱镜9的两次反射后,第二光束和第四光束的传播方向改变180
°
,再次经过第二四分之一波片8的透射后垂直入射至第一偏振分光棱镜4中。经过第一偏振分光棱镜4的透射后进入第一信号处理系统中被接收。
95.如图2所示,本发明提供的第一实施例中的第一信号处理系统包括:第二平面反射镜10、第二偏振分光棱镜11、第一光电探测器12和第二光电探测器13。
96.第一 1级衍射光束经第一偏振分光棱镜4的反射后,依次经第二平面反射镜10的
反射和第二偏振分光棱镜11的反射后进入第一光电探测器12中。
97.第二光束经第一偏振分光棱镜4的透射后,经第二偏振分光棱镜11的透射后进入第一光电探测器12中。
98.第一-1级衍射光束经第一偏振分光棱镜4的反射后,经第二偏振分光棱镜11的反射后进入第二光电探测器13中。
99.第四光束经第一偏振分光棱镜4的透射后,依次经第二平面反射镜10的反射和第二偏振分光棱镜11的透射后进入第二光电探测器13中。
100.第二激光器系统包括:第二双频激光器14、第二分光棱镜15和第三平面反射镜16。
101.第二双频激光器14发出一束具有一定频差的正交线偏振光束垂直入射至第二分光棱镜15中,第二分光棱镜15将线偏振光束分为互相垂直的反射光束和透射光束。
102.反射光束垂直入射至第一偏振分光棱镜4中,第一偏振分光棱镜4将反射光束分为互相垂直的第五光束和第六光束。
103.透射光束经第三平面反射镜16的反射后垂直入射至第一偏振分光棱镜4中,第一偏振分光棱镜4将透射光束分为互相垂直的第七光束和第八光束。
104.第五光束与反射光束互相平行,第六光束与反射光束互相垂直。
105.第七光束与透射光束互相平行,第八光束与透射光束互相垂直。
106.第五光束和第七光束透过第一偏振分光棱镜4后垂直入射至第一折光装置中。第一折光装置包括:第一四分之一波片5和折射棱镜6。
107.第五光束和第七光束经过第一四分之一波片5的透射和折射棱镜6的折射后,以littrow角度入射至衍射光栅7中衍射后分别得到第二 1级衍射光束和第二-1级衍射光束,第二 1级衍射光束和第二-1级衍射光束沿着入射光路径原路返回,依次经过折射棱镜6的折射和第一四分之一波片5的透射后,再次垂直入射至第一偏振分光棱镜4中。经过第一偏振分光棱镜4的反射后进入第二信号处理系统中被接收。
108.第六光束和第八光束分别经过第一偏振分光棱镜4的反射后垂直入射至第二折光装置中。第二折光装置包括:第二四分之一波片8和二次反射棱镜9。
109.第六光束和第八光束经第二四分之一波片8的透射和二次反射棱镜9的两次反射后,第六光束和第八光束的传播方向改变180
°
,再次经过第二四分之一波片8的透射后垂直入射至第一偏振分光棱镜4中。经过第一偏振分光棱镜4的透射后进入第二信号处理系统中被接收。
110.如图3所示,本发明提供的第一实施例中的第二信号处理系统包括:第四平面反射镜17、第三偏振分光棱镜18、第三光电探测器19、第四光电探测器20。
111.第二 1级衍射光束经第一偏振分光棱镜4的反射后,依次经第四平面反射镜17的反射和第三偏振分光棱镜18的反射后进入第三光电探测器19中。
112.第六光束经第一偏振分光棱镜4的透射后,经第三偏振分光棱镜18的透射后进入第三光电探测器19中。
113.第二-1级衍射光束经第一偏振分光棱镜4的反射后,经第三偏振分光棱镜18的反射后进入第四光电探测器20中。
114.第八光束经第一偏振分光棱镜4的透射后,依次经第四平面反射镜17的反射和第三偏振分光棱镜18的透射后进入第四光电探测器20中。
115.第一光电探测器12和第二光电探测器13、第三光电探测器19和第四光电探测器20中分别设置有透光轴与入射光偏振方向呈45
°
的偏振片。
116.第一 1级衍射光束和第四光束经过该偏振片后,偏振方向变为一致并发生干涉,形成第一路干涉信号;
117.第一-1级衍射光束和第二光束经过该偏振片后,偏振方向变为一致并发生干涉,形成第二路干涉信号。
118.第二 1级衍射光束和第八光束经过该偏振片后,偏振方向变为一致并发生干涉,形成第三路干涉信号;
119.第二-1级衍射光束和第六光束经过该偏振片后,偏振方向变为一致并发生干涉,形成第四路干涉信号。
120.第一信号处理系统用于对第一路干涉信号和第二路干涉信号进行处理,第二信号处理系统用于对第三路干涉信号和第四路干涉信号进行处理,实现单次衍射的两倍细分位移测量。
121.当衍射光栅7沿两个矢量方向x、y以及法线方向z发生移动时,可根据
±
1级衍射光光束来测量衍射光栅移动的位移量。
122.图4示出了根据本发明第二实施例提供的二维光栅位移测量装置的光路示意图。
123.图5示出了根据本发明第二实施例提供的二维光栅位移测量装置的x方向光路图。
124.如图4和图5所示,本发明提供的第二实施例中的第一信号处理系统包括:第一光电探测器12和第二光电探测器13。
125.第一 1级衍射光束经第一偏振分光棱镜4的反射后进入第一光电探测器12中。
126.第二光束经第一偏振分光棱镜4的透射后,进入第二光电探测器13中。
127.第一-1级衍射光束经第一偏振分光棱镜4的反射后,进入第二光电探测器13中。
128.第四光束经第一偏振分光棱镜4的透射后,进入第一光电探测器12中。
129.如图6所示,本发明提供的第二实施例中的信号处理系统包括:第三光电探测器19和第四光电探测器20。
130.第二 1级衍射光束经第一偏振分光棱镜4的反射后进入第三光电探测器19中。
131.第六光束经第一偏振分光棱镜4的透射后,进入第四光电探测器20中。
132.第二-1级衍射光束经第一偏振分光棱镜4的反射后,进入第四光电探测器20中。
133.第八光束经第一偏振分光棱镜4的透射后进入第三光电探测器19中。
134.第一 1级衍射光束和第二光束经过该偏振片后,偏振方向变为一致并发生干涉,形成第一路干涉信号;
135.第一-1级衍射光束和第四光束经过该偏振片后,偏振方向变为一致并发生干涉,形成第二路干涉信号。
136.第二 1级衍射光束和第六光束经过该偏振片后,偏振方向变为一致并发生干涉,形成第三路干涉信号;
137.第二-1级衍射光束和第八光束经过该偏振片后,偏振方向变为一致并发生干涉,形成第四路干涉信号。
138.第一信号处理系统用于对第一路干涉信号和第二路干涉信号进行处理,第二信号处理系统用于对第三路干涉信号和第四路干涉信号进行处理,实现单次衍射的两倍细分位
移测量。
139.当衍射光栅7沿两个矢量方向x、y以及法线方向z发生移动时,可根据
±
1级衍射光光束来测量衍射光栅移动的位移量。
140.图7示出了根据本发明实施例提供的二维光栅位移测量装置的衍射光束交叉传输原理示意图。
141.如图7所示,当衍射光栅7接收的littrow入射光束相互交叉时,衍射后的出射光束将按照入射光束的路径原路返回,四束衍射光束也相互交叉。
142.图8示出了根据本发明实施例提供的二维光栅位移测量装置的衍射光束分离传输原理示意图。
143.如图8所示,当衍射光栅7接收的littrow入射光束相互分离时,衍射后的出射光束将按照入射光束的路径原路返回,四束衍射光束也彼此分离,互不干扰。
144.图9示出了根据本发明实施例提供的二维光栅位移测量装置的法线方向位移测量示意图。
145.如图9所示,当衍射光栅7沿着法线方向移动时,即从衍射入射光束汇聚于衍射光栅7表面一点的情况变化为衍射光束交叉的情况时,前后左右四束衍射光的相位将发生变化。
146.当衍射光栅7沿矢量x方向发生移动时,左右两束衍射光的相位将发生变化,根据多普勒频移,可求解衍射光的相位变化量,结合littrow入射的光栅方程,可得到光栅沿矢量x方向移动的位移量;
147.当衍射光栅7沿矢量y方向发生移动时,前后两束衍射光的相位将发生变化,根据多普勒频移,可求解衍射光的相位变化量,结合littrow入射的光栅方程,可得到光栅沿矢量y方向移动的位移量;
148.当衍射光栅7沿法线z方向发生移动时,前后或左右两束衍射光的相位将发生变化,根据多普勒频移,可求解衍射光的相位变化量,结合littrow入射的光栅方程,可得到光栅沿矢量y方向移动的位移量。
149.当二维衍射光栅沿着矢量y方向以速度vy运动时,假设入射光频率为f,则衍射光束由二维衍射光栅移动引起的频率变化为:
[0150][0151]
根据频率变化计算相位的变化为:
[0152][0153]
所以,通过求解 1级衍射光的相位变化,可以求出沿y方向移动的位移量δy。
[0154]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所作出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
