1.本实用新型涉及管道检测设备技术领域,更具体涉及一种自潜式管道带水检测机器人。
背景技术:
2.管道在制造及投入运行等过程中都可能存在缺陷,因此需要及时对管道进行检测,准确了解管道的运行状况,以保证管道的可靠安全运行。现在市面管道检测产品多为cctv小车检测、潜望镜检测或是双浮筒h型机器人检测。
3.cctv小车适用于无水或水位低的管道,针对水位高或满水管道,检测前需要进行封堵、抽水等工序,潜望镜检测适用于水位低于50%的直管,而且定位缺陷位置不准;同时水面浮潜的双浮筒h型检测机器人体积大、易倾翻或卡死。
技术实现要素:
4.本实用新型所要解决的技术问题在于,如何实现带水检测机器人在高水位或满水管道中的浮潜检测。
5.本实用新型通过以下技术手段实现解决上述技术问题的:
6.一种自潜式管道带水检测机器人,包括机体以及对称设于机体两侧的行走轮、下潜部件,所述机体首尾两端均呈锥形设置,且尾端锥形上翘。
7.本实用新型中将下潜助推器安装在两侧,满足机器人高水位或满水管道内上浮下潜的控制需求,同时可通过左右助推器的控制调节实现水平姿态的自调整。
8.进一步的,所述机体尾端固定设有尾舵。
9.进一步的,所述行走轮外侧放射性布设有多个叶片,周向设置有防滑槽。
10.进一步的,所述机体两侧各有2个行走轮,所述下潜部件位于机体同侧两个行走轮的中间位置。
11.进一步的,还包括驱动部件、检测部件,所述检测部件固定设于机体顶部,所述驱动部件位于机体内腔。
12.进一步的,所述驱动部件包括驱动电机、螺旋桨,所述机体尾部开设有螺旋桨腔,且其内部转动连接有螺旋桨,所述驱动电机为固定设于机体内,具有两个输出端,分别与螺旋桨、行走轮传动配合。
13.进一步的,所述检测部件包括相机、声呐,所述相机固定设于机体行进端顶部,所述声呐固定设于机体行进端端面。
14.进一步的,所述机体包括车身壳体、上壳盖、电池仓盖、后尾盖,所述上壳盖、电池仓盖一次固定连接在车声壳体顶部,并与车身壳体围合形成多个密闭腔体,所述后尾盖固定设于车身壳体尾部。
15.进一步的,所述后尾盖为格栅结构,位于螺旋桨腔的进水口。
16.进一步的,所述下潜部件包括下潜助推器,所述下潜助推器固定设于车身壳体两
侧。
17.本实用新型的优点在于:
18.下潜助推器安装在两侧,满足机器人高水位或满水管道内上浮下潜的控制需求,同时可通过左右助推器的控制调节实现水平姿态的自调整。
19.尾舵配合机体尾部锥形上翘的设计,起到阻挡螺旋桨运行时飞溅水花,同时起到平衡舵作用,平衡机器人因水流冲击导致的摆动。
20.助推螺旋桨结构简单,重量轻,是一种反作用式推进装置,螺旋桨旋转时,桨向后(或向前)推水并受到水的反作用力而产生向前(或向后) 的推力。有助于提高机器人在水中的行进速度。
21.驱动轮两侧多叶片、顶部高密度横槽的中空设计,可同时满足水中动力漂移、软硬污泥中越野行走需求。
22.机器人前置相机为云台相机,结构紧凑盲区小,可通过俯仰、旋转,进行多方位的检测和图像录制;相机底座外圈安装有密封罩,实现机体防水。
附图说明
23.图1为本实用新型实施例提供的一种自潜式管道带水检测机器人的主视结构示意图;
24.图2为本实用新型实施例提供的一种自潜式管道带水检测机器人的俯视结构示意图;
25.图3为本实用新型实施例提供的一种自潜式管道带水检测机器人的右视结构示意图;
26.图4为本实用新型实施例提供的一种自潜式管道带水检测机器人的立体结构示意图;
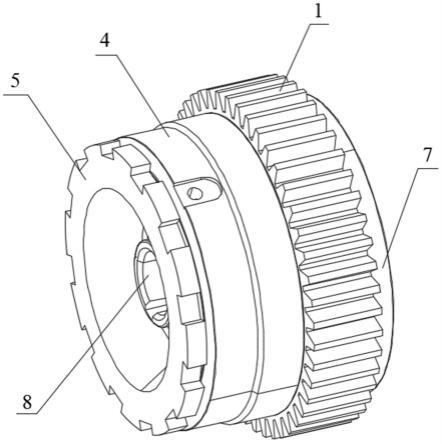
27.图5为图4中a部放大结构示意图。
具体实施方式
28.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
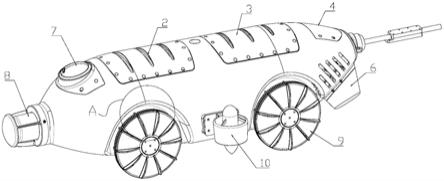
29.参考图1-4,一种自潜式管道带水检测机器人,包括:机体、行走轮9、下潜部件、尾部的螺旋桨11。其中,机体包括车身壳体1、上壳盖2、3、电池仓盖4、后尾盖5、尾舵6。车身壳体1是机器人的基础部件之一,用于安装、搭载驱动部件、电池包、相机7、声纳8等主要元器件,并实现水中漂浮需求。采用高强度工程塑料3d打印而成的“薄壁、强背”结构,确保足够强度的前提下,降低了质量和材料成本。外型海豹仿生设计,首尾两端锥形上翘。具备较高的通过性和较小的流体阻力,实现复杂环境下能过得去、回得来。称身壳体内部为中空结构,被隔板分隔成多个腔体,用于固定各种驱动部件、传动部件、数据模块等。上壳盖2、3可拆卸的固定在车身壳体1的上部,前后各一个,便于机体内驱动及传动部件的维护和检修。
电池仓盖4位于车身壳体尾部顶面,密封封堵电池仓。电池仓为独立仓室,避免与其他部件发生干扰,主要是对独立仓设计的电池包起防护作用。后尾盖5固定于车声壳体尾部的下方,封堵尾部螺旋桨11腔,后尾盖5为格栅式,为了防护机体尾部螺旋桨11不受管道内垃圾缠绕,影响推进效果。
30.检测元件主要包括相机7、声纳8。相机7固定设于机体行进端顶部,声呐固定设于机体行进端端面。相机7采用监控云台相机7,满足机器人行进过程中对管道的缺陷检测需求,云台相机7具有高像素及高倍变焦功能,可通过镜头旋转、仰俯、变倍实现水面上部分缺陷观察和图像录制。声纳8 通过反射原理环向扫描识别水下管道轮廓,实现水下部分变形、破裂、沉积等缺陷检测。
31.行走轮9为4个,两两对称固定在机体两侧,下潜助推助推器10为2 个,对称固定在机体两侧,并位于前后行走轮9的中间位置。如图5所示,行走轮9两侧放射性均匀设置多个叶片91、周向高密度防滑槽92结构设计,可同时满足水中动力漂移、软硬污泥中越野行走需求,左右两侧安装下潜助推助推器10及行尾部固定的螺旋桨11,整体动力强劲,满足机器人在水中全速前进及水下浮潜的运动需求。
32.本实施例中,机体内部的腔体如何分隔,分隔成多少个,根据实际需要确定,行走轮9、螺旋桨11、下潜助推器10的驱动电机及传动结构均位于机体内腔,具体结构为常规结构,不再详细介绍。
33.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
技术特征:
1.一种自潜式管道带水检测机器人,其特征在于,包括机体以及对称设于机体两侧的行走轮(9)、下潜部件,所述机体首尾两端均呈锥形设置,且尾端锥形上翘。2.根据权利要求1所述的一种自潜式管道带水检测机器人,其特征在于,所述机体尾端固定设有尾舵。3.根据权利要求1或2所述的一种自潜式管道带水检测机器人,其特征在于,所述行走轮(9)外侧放射性布设有多个叶片(91),周向设置有防滑槽(92)。4.根据权利要求1或2所述的一种自潜式管道带水检测机器人,其特征在于,所述机体两侧各有2个行走轮(9),所述下潜部件位于机体同侧两个行走轮(9)的中间位置。5.根据权利要求1或2所述的一种自潜式管道带水检测机器人,其特征在于,还包括驱动部件、检测部件,所述检测部件固定设于机体顶部,所述驱动部件位于机体内腔。6.根据权利要求5所述的一种自潜式管道带水检测机器人,其特征在于,所述驱动部件包括驱动电机、螺旋桨(11),所述机体尾部开设有螺旋桨(11)腔,且其内部转动连接有螺旋桨(11),所述驱动电机为固定设于机体内,具有两个输出端,分别与螺旋桨(11)、行走轮(9)传动配合。7.根据权利要求5所述的一种自潜式管道带水检测机器人,其特征在于,所述检测部件包括相机(7)、声呐(8),所述相机(7)固定设于机体行进端顶部,所述声呐(8)固定设于机体行进端端面。8.根据权利要求1或2所述的一种自潜式管道带水检测机器人,其特征在于,所述机体包括车身壳体(1)、上壳盖(2、3)、电池仓盖(4)、后尾盖,所述上壳盖(2、3)、电池仓盖(4)一次固定连接在车声壳体顶部,并与车身壳体围合形成多个密闭腔体,所述后尾盖(5)固定设于车身壳体尾部。9.根据权利要求8所述的一种自潜式管道带水检测机器人,其特征在于,所述后尾盖(5)为格栅结构,位于螺旋桨(11)腔的进水口。10.根据权利要求1或2所述的一种自潜式管道带水检测机器人,其特征在于,所述下潜部件包括下潜助推器(10),所述下潜助推器(10)固定设于车身壳体两侧。
技术总结
本实用新型公开了一种自潜式管道带水检测机器人,包括机体以及对称设于机体两侧的行走轮、下潜部件,所述机体首尾两端均呈锥形设置,且尾端锥形上翘。本实用新型中将下潜助推器安装在两侧,满足机器人高水位或满水管道内上浮下潜的控制需求,同时可通过左右助推器的控制调节实现水平姿态的自调整。控制调节实现水平姿态的自调整。控制调节实现水平姿态的自调整。
技术研发人员:孙强 仲辉 许嘉诚 杨静 赵修林 于振中
受保护的技术使用者:哈工大机器人(合肥)国际创新研究院
技术研发日:2022.04.15
技术公布日:2022/9/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。