1.本实用新型涉及一种单臂吊,特别涉及一种全电动旋臂式单臂吊。
背景技术:
2.单臂吊是利用单个立柱和回转臂来起吊货物的一种起重设备。
3.常用单臂吊只能上下起吊且是固定式,吊臂在起吊物体后不能电动左右旋转装卸货物。
技术实现要素:
4.本实用新型提供一种全电动旋臂式单臂吊用来克服现有技术中单臂吊的吊臂不能实现左右摆动的缺陷。
5.为了解决上述技术问题,本实用新型提供了如下的技术方案:
6.本实用新型公开了一种全电动旋臂式单臂吊,包括车架,所述车架的上方设有立柱,所述立柱与其上方的伸缩式吊臂铰接,位于伸缩式吊臂同一水平面的立柱上还设有用于起吊的卷扬起重机,所述卷扬起重机与立柱共用同一个伸缩式吊臂,伸缩油缸位于所述伸缩式吊臂上方,所述伸缩式吊臂与车架之间安装有起升油缸,所述车架的后方设有控制面板,所述控制面板包括液压控制站,所述液压控制站的两侧分别设有液压控制阀和电路板以及位于控制面板上方的控制手柄,所述控制手柄操控伸缩式吊臂的动作,所述车架的侧面还设有液压回转装置,所述控制面板电性控制液压回转装置、液压控制站和液压控制阀的动作。
7.进一步的,所述车架的底部的一端导向轮,另一端设有动力轮,二者的配合使用使单臂吊的移动更加便捷。
8.进一步的,所述车架的两侧均安装有辅助支撑的侧支撑腿。
9.进一步的,所述伸缩式吊臂的端部设有两组吊钩,一组安装在伸缩式吊臂上,另一组另一组通过钢缆绳与卷扬起重机连接,可根据货物任意选择吊钩。
10.进一步的,所述伸缩油缸控制伸缩式吊臂的伸缩动作。
11.进一步的,所述起升油缸实现伸缩式吊臂的上下摆动动作,其摆动角度为129
°
。
12.进一步的,所述液压回转装置实现伸缩式吊臂的左右摆动动作,其摆动角度为120
°
。
13.本实用新型所达到的有益效果是:通过控制面板上的控制手柄分别控制起升油缸、伸缩油缸来控制伸缩式吊臂的升降、伸缩,液压回转装置实现伸缩式吊臂左右摆动的三个动作,本产品的起吊高度和伸缩长度范围广,操作省时省力,在车身不动的前提下实行定点旋转装卸。
附图说明
14.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用
新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
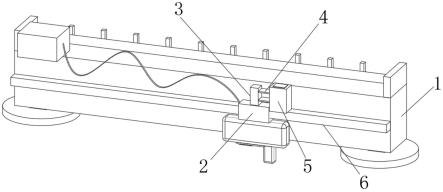
15.图1是本实用新型的结构示意图;
16.图2是本实用新型的上下动作示意图;
17.图3是本实用新型的左右动作示意图。
18.图中:1、车架;2、控制面板;3、立柱;4、伸缩式吊臂;5、起升油缸;6、伸缩油缸;7、液压回转装置;8、侧支撑腿;9、控制手柄;10、导向轮;11、吊钩;12、液压控制站;13、液压控制阀;14、电路板;15、卷扬起重机;16、动力轮。
具体实施方式
19.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
20.实施例1
21.如图1-3所示,一种全电动旋臂式单臂吊,包括车架1,所述车架1的上方设有立柱3,所述立柱3与其上方的伸缩式吊臂4铰接,位于伸缩式吊臂4同一水平面的立柱3上还设有用于起吊的卷扬起重机15,所述卷扬起重机15与立柱3共用同一个伸缩式吊臂4,伸缩油缸6位于所述伸缩式吊臂4上方,所述伸缩式吊臂4与车架1之间安装有起升油缸5,所述车架1的后方设有控制面板2,所述控制面板2包括液压控制站12,所述液压控制站12的两侧分别设有液压控制阀13和电路板14以及位于控制面板2上方的控制手柄9,所述控制手柄9操控伸缩式吊臂4的动作,所述车架1的侧面还设有液压回转装置7。
22.所述车架1底部的一端导向轮10,另一端设有动力轮16,二者的配合使用使单臂吊的移动更加便捷。
23.所述车架1的两侧均安装有辅助支撑的侧支撑腿8。
24.所述伸缩式吊臂4的端部设有两组吊钩11,一组安装在伸缩式吊臂4上,另一组通过钢缆绳与卷扬起重机15连接,可根据货物任意选择吊钩11。
25.所述吊钩11通过卷扬起重机15实现起吊货物的升降。
26.所述控制面板2电性控制液压回转装置7、液压控制站12和液压控制阀13的动作。
27.伸缩油缸6控制伸缩式吊臂4的伸缩动作。
28.起升油缸5实现伸缩式吊臂4的上下摆动动作,其摆动角度为129
°
。
29.液压回转装置7实现伸缩式吊臂4的左右摆动动作,其摆动角度为120
°
。
30.货物的起吊/装卸:吊装时需将侧支撑腿8打开并支撑于地面,通过控制面板2上的控制手柄9分别控制起升油缸5、伸缩油缸6、液压回转装置7来控制伸缩式吊臂4的升降、伸缩与左右旋转的三个动作。
31.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种全电动旋臂式单臂吊,其特征在于,包括车架,所述车架的上方设有立柱,所述立柱与其上方的伸缩式吊臂铰接,位于伸缩式吊臂同一水平面的立柱上还设有用于起吊的卷扬起重机,所述卷扬起重机与立柱共用同一个伸缩式吊臂,伸缩油缸位于所述伸缩式吊臂上方,所述伸缩式吊臂与车架之间安装有起升油缸,所述车架的后方设有控制面板,所述控制面板包括液压控制站,所述液压控制站的两侧分别设有液压控制阀和电路板以及位于控制面板上方的控制手柄,所述控制手柄操控伸缩式吊臂的动作,所述车架的侧面还设有液压回转装置,所述控制面板电性控制液压回转装置、液压控制站和液压控制阀的动作。2.根据权利要求1所述的全电动旋臂式单臂吊,其特征在于,所述车架的底部的一端导向轮,另一端设有动力轮,二者的配合使用使单臂吊的移动更加便捷。3.根据权利要求1所述的全电动旋臂式单臂吊,其特征在于,所述车架的两侧均安装有辅助支撑的侧支撑腿。4.根据权利要求1所述的全电动旋臂式单臂吊,其特征在于,伸缩式吊臂的端部设有两组吊钩,一组安装在伸缩式吊臂上,另一组通过钢缆绳与卷扬起重机连接,可根据货物任意选择吊钩。5.根据权利要求1所述的全电动旋臂式单臂吊,其特征在于,所述伸缩油缸控制伸缩式吊臂的伸缩动作。6.根据权利要求1所述的全电动旋臂式单臂吊,其特征在于,所述起升油缸实现伸缩式吊臂的上下摆动动作,其摆动角度为129
°
。7.根据权利要求1所述的全电动旋臂式单臂吊,其特征在于,所述液压回转装置实现伸缩式吊臂的左右摆动动作,其摆动角度为120
°
。
技术总结
本实用新型公开了一种全电动旋臂式单臂吊,包括车架,其上方设有立柱,立柱与伸缩式吊臂连接,伸缩油缸位于所述伸缩式吊臂上,伸缩式吊臂与车架之间安装有起升油缸,车架后方设有控制面板,控制面板包括液压控制站,液压控制站的两侧分别设有液压控制阀和电路板以及位于控制面板上方的控制手柄,控制手柄操控伸缩式吊臂的动作,车架的侧面还设有液压回转装置,控制面板电性控制液压回转装置、液压控制站和液压控制阀的动作;通过控制手柄分别控制起升油缸、伸缩油缸来控制伸缩式吊臂的升降、伸缩,液压回转装置实现伸缩式吊臂左右摆动的三个动作,本产品的起吊高度和伸缩长度范围广,操作省时省力,在车身不动的前提下实行定点旋转装卸。点旋转装卸。点旋转装卸。
技术研发人员:于红梅 徐富兴 徐国良 徐玉洁
受保护的技术使用者:无锡市通洋机械科技有限公司
技术研发日:2022.06.02
技术公布日:2022/9/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。