一种mems传感器的三维封装装置及三维封装方法
技术领域
1.本发明涉及一种mems传感器的三维封装装置及三维封装方法,属于微电子技术领域。
背景技术:
2.近年来,微电子技术(mems,micro-electro-mechanical system)已经涉及现代生活的各个方面,随着技术与市场需求的不断推进,现代电子产品对轻型化、微型化、低能耗、高可靠性的要求不断提高,因而芯片封装(mcp)、叠层封装(pop)、系统级封装(sip)等三维封装技术不断涌现。在三维封装中,由于用三维器件取代了单芯片封装,因而封装尺寸和重量显著减小,其减小幅度与垂直度互连密度、热性能以及所需强度等工艺过程有一定的关系。
3.当前,在传感器三维封装时的装片工序中,通过装片胶将芯片贴装在基板上的装片机在工作过程中,均是先在整条基板上进行点胶后再进行贴装,而装片机发生故障需要停机维护时,由于有些装片胶易凝固,导致装片机维修完毕再进行工作时,装片胶无法起到粘合作用,从而会大大影响芯片贴装效果,而且,装片机轨道上的基板直接暴露在外,表面易掉落灰尘等杂质,而杂质不仅会影响点胶效果,还会导致芯片无法正常贴装。
4.因此,需要有一种mems传感器的三维封装装置,实现点胶与芯片贴装同时进行,防止装片胶凝固而影响装片效果,同时,实现基板的清洁,防止杂质影响点胶和芯片贴装。
技术实现要素:
5.本发明要解决的技术问题是:为了克服现有技术的不足,提供一种mems传感器的三维封装装置。
6.本发明解决上述问题所采用的技术方案为:一种mems传感器的三维封装装置,包括工作台,所述工作台的顶部固定设置有轨道,所述轨道平行于左右方向设置,所述轨道的正上方设置有镜头,所述镜头与工作台固定连接,所述轨道上设置有基板输送装置和清洁装置,所述轨道的上方设置有贴装装置,所述贴装装置位于清洁装置的右侧;
7.所述贴装装置包括点胶机构、吸取机构和两个平移机构,两个平移机构分别位镜头的前侧和后侧,所述点胶机构和吸取机构分布与两个平移机构的移动部连接,所述平移机构;
8.所述清洁装置包括设置在轨道顶部的收集槽,所述轨道的前后两侧通过收集槽连通,所述轨道的后侧设置有收集箱,所述收集箱位于收集槽的下方,所述收集箱与轨道贴合,所述收集箱的顶部开口,所述收集槽的前侧设置有推板,所述推板与收集槽匹配,所述推板上连接有气缸,所述气缸驱动推板前后移动,所述收集槽的右侧设置有风扇,所述风扇位于轨道的上方,所述风扇与工作台固定连接。
9.作为优选,所述平移机构包括第一丝杆,所述第一丝杆平行于前后方向,所述第一丝杆的一端通过第一电机驱动,所述第一丝杆上螺纹连接有第一滑块。
10.作为优选,所述平移机构还包括清洁组件,所述点胶机构和吸取机构均位于清洁组件的靠近轨道的一侧,所述清洁组件包括清洁盘,所述清洁盘的轴线竖向设置,所述清洁盘的底部通过第二电机驱动,所述清洁盘的顶部铺设有无尘纸。
11.作为优选,所述点胶机构包括点胶器,所述点胶器与第一滑块固定连接,所述点胶器上安装有点胶头。
12.作为优选,所述吸取机构包括真空吸附器,所述真空吸附器与第一滑块固定连接,所述真空吸附器上安装有吸嘴,所述工作台的前侧设置有晶圆放置槽。
13.作为优选,所述收集箱上设置有密封组件,所述密封组件包括盖板和两个升降单元,所述盖板位于收集箱的正上方,所述盖板设置在收集槽内底部的上方,两个升降单元分别设置在收集箱的左右两侧,所述升降单元与盖板的底部连接。
14.作为优选,所述升降单元包括固定块和两个复位部件,所述固定块固定设置在收集箱上,所述固定块上竖向活动穿设有定位柱,所述定位柱的底端固定设置在工作台上,所述定位柱的顶端与盖板的底部抵靠,两个复位部件分别设置在固定块的前后两侧,所述复位部件包括固定设置在收集箱上的连接块,所述连接块上竖向活动穿设有升降杆,所述连接块和盖板之间设置有弹簧,所述连接块通过弹簧与盖板连接,所述弹簧处于拉伸状态。
15.作为优选,所述收集槽自下而上向右倾斜设置。
16.作为优选,所述基板输送装置包括动力机构和多个输送机构,多个输送机构自左至右依次间隔布置,所述动力机构包括第二丝杆,所述第二丝杠平行于左右方向,所述第二丝杆通过第三电机驱动,所述输送机构包括第一夹爪、第二夹爪和第二滑块,所述第二滑块与第二丝杆螺纹连接,所述第二夹爪固定设置在第二滑块上,所述第一夹爪与工作台固定连接。
17.本发明的另一目的是提供一种采用上述三维封装装置的三维封装方法。
18.为达到上述目的,本发明采用的技术方案是:一种基于上述三维封装装置的三维封装方法,所述三维封装方法包括如下步骤:
19.a、基板通过前道工序输送至轨道上;
20.b、通过基板输送装置使基板在轨道上移动;
21.c、基板移动过程中,风扇工作,使空气作用到基板表面,将基板上的杂质吹离并使杂质掉落至收集槽内,之后通过气缸推动推板在收集槽内向后移动,则使收集槽内的杂质推至收集箱内并掉落至收集箱中;
22.d、基板移动至镜头正下方后,基板停止移动,通过镜头扫描基板,之后,通过其中一个平移机构使点胶机构移动至基板上并实现点胶,点胶完毕后,再使点胶机构实现复位,接着,通过另一个平移机构使吸附机构移动至基板点胶完毕位置,并将芯片贴装在基板上,随后使平移机构复位并吸取下一个芯片,如此循环;
23.将晶圆收纳盘放置在晶圆放置槽内,同时将晶圆放置在晶圆收纳盘上,通过晶圆收纳盘驱动晶圆前后左右移动,便于吸附机构吸取晶圆上的芯片;
24.d、基板贴装完毕后,再通过基板输送装置在轨道上向右移动,并使基板移动至下一工序。
25.与现有技术相比,本发明的优点在于:
26.本发明一种mems传感器的三维封装装置,实现了清除基板上杂质的功能,防止基
板上杂质影响点胶和芯片贴装,同时,还实现了点胶与芯片贴装同时进行,防止该设备发生故障需要停机维护时,装片胶凝固影响芯片贴装效果。
附图说明
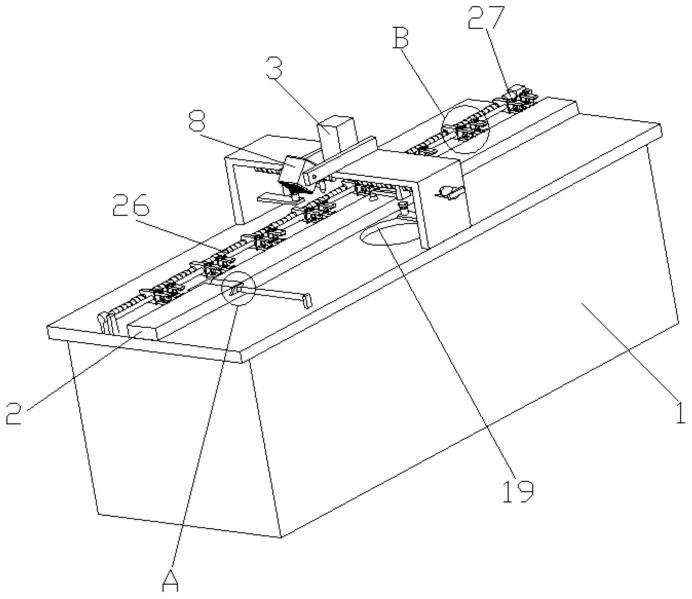
27.图1为本发明一种mems传感器的三维封装装置的立体图;
28.图2为本发明一种mems传感器的三维封装装置的正视图;
29.图3为本发明一种mems传感器的三维封装装置的俯视图;
30.图4为本发明一种mems传感器的三维封装装置的右视图;
31.图5为图1的a部放大图;
32.图6为贴装装置的结构示意图;
33.图7为图6的c部放大图;
34.图8为密封组件的结构示意图;
35.图9为图1的b部放大图。
36.其中:1.工作台,2.轨道,3.镜头,4.收集槽,5.收集箱,6.推板,7.气缸,8.风扇,9.第一丝杆,10.第一电机,11.第一滑块,12.清洁盘,13.第二电机,14.无尘纸,15.点胶器,16.点胶头,17.真空吸附器,18.吸嘴,19.晶圆放置槽,20.盖板,21.固定块,22.定位柱,23.连接块,24.升降杆,25.弹簧,26.第二丝杆,27.第三电机,28.第一夹爪,29.第二夹爪,30.第二滑块。
具体实施方式
37.如图1-9所示,本实施例中的一种mems传感器的三维封装装置,包括工作台1,所述工作台1的顶部固定设置有轨道2,所述轨道2平行于左右方向设置,所述轨道2的正上方设置有镜头3,所述镜头3与工作台1固定连接,所述轨道2上设置有基板输送装置和清洁装置,所述轨道2的上方设置有贴装装置,所述贴装装置位于清洁装置的右侧;
38.所述贴装装置包括点胶机构、吸取机构和两个平移机构,两个平移机构分别位镜头3的前侧和后侧,所述点胶机构和吸取机构分布与两个平移机构的移动部连接,所述平移机构;
39.所述清洁装置包括设置在轨道2顶部的收集槽4,所述轨道2的前后两侧通过收集槽4连通,所述轨道2的后侧设置有收集箱5,所述收集箱5位于收集槽4的下方,所述收集箱5与轨道2贴合,所述收集箱5的顶部开口,所述收集槽4的前侧设置有推板6,所述推板6与收集槽4匹配,所述推板6上连接有气缸7,所述气缸7驱动推板6前后移动,所述收集槽4的右侧设置有风扇8,所述风扇8位于轨道2的上方,所述风扇8与工作台1固定连接。
40.该设备运行期间,基板通过前道工序输送至轨道2上,通过基板输送装置使基板在轨道2上移动,基板移动过程中,风扇8工作,使空气作用到基板表面,将基板上的杂质吹离并使杂质掉落至收集槽4内,之后通过气缸7推动推板6在收集槽4内向后移动,则使收集槽4内的杂质推至收集箱5内并掉落至收集箱5中,实现了清洁基板的功能,防止基板上杂质影响点胶和芯片贴装,当基板移动至镜头3正下方后,基板停止移动,通过镜头3扫描基板,之后,通过其中一个平移机构使点胶机构移动至基板上并实现点胶,点胶完毕后,再使点胶机构实现复位,接着,通过另一个平移机构使吸附机构移动至基板点胶完毕位置,并将芯片贴
装在基板上,随后使平移机构复位并吸取下一个芯片,如此循环,则可以实现点胶与芯片贴装同时进行,防止该设备发生故障需要停机维护时,装片胶凝固影响芯片贴装效果。
41.作为优选,所述平移机构包括第一丝杆9,所述第一丝杆9平行于前后方向,所述第一丝杆9的一端通过第一电机10驱动,所述第一丝杆9上螺纹连接有第一滑块11。
42.作为优选,所述平移机构还包括清洁组件,所述点胶机构和吸取机构均位于清洁组件的靠近轨道2的一侧,所述清洁组件包括清洁盘12,所述清洁盘12的轴线竖向设置,所述清洁盘12的底部通过第二电机13驱动,所述清洁盘12的顶部铺设有无尘纸14。
43.作为优选,所述点胶机构包括点胶器15,所述点胶器15与第一滑块11固定连接,所述点胶器15上安装有点胶头16。
44.作为优选,所述吸取机构包括真空吸附器17,所述真空吸附器17与第一滑块11固定连接,所述真空吸附器17上安装有吸嘴18,所述工作台1的前侧设置有晶圆放置槽19。
45.作为优选,所述收集箱5上设置有密封组件,所述密封组件包括盖板20和两个升降单元,所述盖板20位于收集箱5的正上方,所述盖板20设置在收集槽4内底部的上方,两个升降单元分别设置在收集箱5的左右两侧,所述升降单元与盖板20的底部连接。
46.第一电机10启动,使第一丝杆9转动,从而使第一滑块11可以在第一丝杆9上前后移动,即可以使点胶头16和吸嘴18前后移动,而基板贴装完毕后,使吸嘴18和点胶头16移动至无尘纸14的上方,随后,第二电机13驱动清洁盘12转动,从而使无尘纸14转动,使无尘纸14对吸嘴18和点胶头16实现擦拭,则使吸嘴18和点胶头16上的杂质清除,防止杂质影响点胶和贴装效果。
47.作为优选,所述升降单元包括固定块21和两个复位部件,所述固定块21固定设置在收集箱5上,所述固定块21上竖向活动穿设有定位柱22,所述定位柱22的底端固定设置在工作台1上,所述定位柱22的顶端与盖板20的底部抵靠,两个复位部件分别设置在固定块21的前后两侧,所述复位部件包括固定设置在收集箱5上的连接块23,所述连接块23上竖向活动穿设有升降杆24,所述连接块23和盖板20之间设置有弹簧25,所述连接块23通过弹簧25与盖板20连接,所述弹簧25处于拉伸状态。
48.当收集箱5内杂质过多需要清除时,将收集箱5向上移动,使盖板20与定位柱22分离,此时,通过弹簧25的弹性作用则使盖板20向着靠近收集箱5方向移动并与收集箱5贴合,使收集箱5内的杂质处于密封的空间内,防止收集箱5移动过程中杂质发生泄露,之后,手动拉动盖板20与收集箱5分离,并将杂质倒出,杂质清理完毕后,将固定块21套在定位柱22上并使定位柱22与盖板20的底部抵靠,此时,通过收集箱5自身重力作用向下移动,则使收集箱5与盖板20之间距离增大,且收集箱5的移动带动连接块23同步移动,并使弹簧25拉伸。
49.作为优选,所述收集槽4自下而上向右倾斜设置。
50.作为优选,所述基板输送装置包括动力机构和多个输送机构,多个输送机构自左至右依次间隔布置,所述动力机构包括第二丝杆26,所述第二丝杠平行于左右方向,所述第二丝杆26通过第三电机27驱动,所述输送机构包括第一夹爪28、第二夹爪29和第二滑块30,所述第二滑块30与第二丝杆26螺纹连接,所述第二夹爪29固定设置在第二滑块30上,所述第一夹爪28与工作台1固定连接。
51.输送基板期间,第三电机27驱动第二丝杆26往复转动,则使第二滑块30在第二丝杆26上往复移动,即带动第二夹爪29往复移动,且第二夹爪29向右移动时,第二夹爪29夹持
基板,而第一夹爪28松开,则使第二夹爪29带动基板向右移动,当第二夹爪29向左移动时,第二夹爪29松开,第一夹爪28夹持基板,基板处于静止状态,而当基板移动至镜头3下方进行贴装动作时,第二夹爪29和第一夹爪28同时夹持基板,且第三电机27停止运行。
52.本发明的另一目的是提供一种采用上述三维封装装置的三维封装方法。
53.为达到上述目的,本发明采用的技术方案是:一种基于上述三维封装装置的三维封装方法,所述三维封装方法包括如下步骤:
54.a、基板通过前道工序输送至轨道2上;
55.b、通过基板输送装置使基板在轨道2上移动;
56.第三电机27驱动第二丝杆26往复转动,则使第二滑块30在第二丝杆26上往复移动,即带动第二夹爪29往复移动,且第二夹爪29向右移动时,第二夹爪29夹持基板,而第一夹爪28松开,则使第二夹爪29带动基板向右移动,当第二夹爪29向左移动时,第二夹爪29松开,第一夹爪28夹持基板,基板处于静止状态,如此,使基板在轨道2上间歇性移动。
57.c、基板移动过程中,风扇8工作,使空气作用到基板表面,将基板上的杂质吹离并使杂质掉落至收集槽4内,之后通过气缸7推动推板6在收集槽4内向后移动,则使收集槽4内的杂质推至收集箱5内并掉落至收集箱5中;
58.当收集箱5内杂质过多需要清除时,将收集箱5向上移动,使盖板20与定位柱22分离,此时,通过弹簧25的弹性作用则使盖板20向着靠近收集箱5方向移动并与收集箱5贴合,使收集箱5内的杂质处于密封的空间内,防止收集箱5移动过程中杂质发生泄露,之后,手动拉动盖板20与收集箱5分离,并将杂质倒出,杂质清理完毕后,将固定块21套在定位柱22上并使定位柱22与盖板20的底部抵靠,此时,通过收集箱5自身重力作用向下移动,则使收集箱5与盖板20之间距离增大,且收集箱5的移动带动连接块23同步移动,并使弹簧25拉伸。
59.d、基板移动至镜头3正下方后,基板停止移动,通过镜头3扫描基板,之后,通过其中一个平移机构使点胶机构移动至基板上并实现点胶,点胶完毕后,再使点胶机构实现复位,接着,通过另一个平移机构使吸附机构移动至基板点胶完毕位置,并将芯片贴装在基板上,随后使平移机构复位并吸取下一个芯片,如此循环;
60.将晶圆收纳盘放置在晶圆放置槽19内,同时将晶圆放置在晶圆收纳盘上,通过晶圆收纳盘驱动晶圆前后左右移动,便于吸附机构吸取晶圆上的芯片;
61.第一电机10启动,使第一丝杆9转动,从而使第一滑块11可以在第一丝杆9上前后移动,即可以使点胶头16和吸嘴18前后移动,而基板贴装完毕后,使吸嘴18和点胶头16移动至无尘纸14的上方,随后,第二电机13驱动清洁盘12转动,从而使无尘纸14转动,使无尘纸14对吸嘴18和点胶头16实现擦拭,则使吸嘴18和点胶头16上的杂质清除,防止杂质影响点胶和贴装效果。
62.d、基板贴装完毕后,再通过基板输送装置在轨道2上向右移动,并使基板移动至下一工序。
63.除上述实施例外,本发明还包括有其他实施方式,凡采用等同变换或者等效替换方式形成的技术方案,均应落入本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。