技术特征:
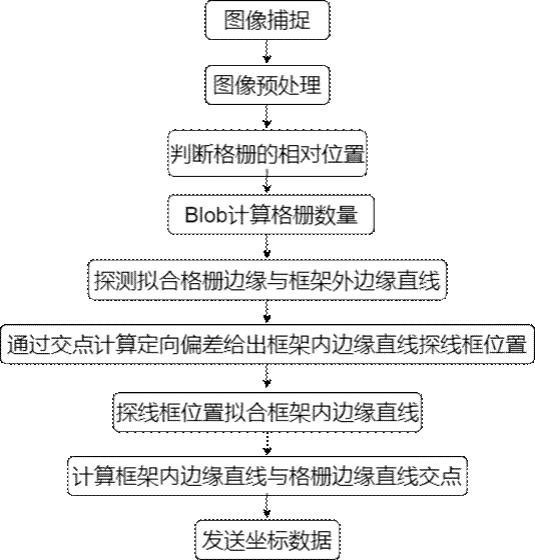
1.一种塔盘的视觉检测方法,其特征是,对于由四边形的框架内部嵌入一定数量的格栅组成的塔盘,采用激光测距传感器测量塔盘长度,根据长度判别塔盘种类,塔盘种类确定后,塔盘中格栅横向或纵向的方向同时确定;通过工业光源对格栅进行打光,使格栅的横切面在工业光源的照射下形成反光,形成格栅横切面与框架边框亮,其余部分暗的视觉效果,拍照采集形成明暗对比的塔盘图像;结合格栅的方向,根据塔盘图像判断出格栅位置和数量,得到格栅横切面两条边缘与框架边框内边缘的交点,确定该塔盘种类目标焊接点位置坐标。2.根据权利要求1所述的塔盘的视觉检测方法,其特征是,判断格栅位置具体包括以下步骤:将单次拍照的视觉检测范围内,横向格栅划分为左右两个图像采集框,纵向格栅划分为上下两个图像采集框,结合格栅的方向,判断出格栅相对于框架的具体左右位置或上下位置关系,即判断出格栅位置。3.根据权利要求2所述的塔盘的视觉检测方法,其特征是,格栅相对于框架的左右位置关系的判断方法为:对于划分的左右两个图像采集框x与图像采集框y,对其内部连通的区域进行检测,通过亮度面积进行比较筛选,判断左侧的图形采集框x中能否找到与该塔盘种类对应的格栅横切面的区域面积与宽度相符的区域,如果能够找到则判断格栅在左侧的图像采集框x中,如果未找到则判断格栅在右侧的图像采集框y中,从而判断出格栅相对于框架的左右位置。4.根据权利要求2所述的塔盘的视觉检测方法,其特征是,格栅相对于框架的上下位置关系的判断方法为:对于划分的上下两个图像采集框x与图像采集框y,对其内部连通的区域进行检测,通过亮度面积进行比较筛选,判断上侧的图形采集框x中能否找到与该塔盘种类对应的格栅横切面的区域面积与宽度相符的区域,如果能够找到则判断格栅在上侧的图像采集框x中,如果无法找出则可以判断出格栅在下侧的图像采集框y中,从而判断出格栅相对于框架的上下位置。5.根据权利要求3或4所述的塔盘的视觉检测方法,其特征是,格栅数量的检测步骤为:在判断出格栅相对于框架的左右位置或上下位置关系后,对于格栅所在的图像采集框内的亮度区域进行判断,通过计算在该图像采集框中的塔盘格栅顶端的横切面的面积与宽度特征相符的区域,得出格栅的条数。6.根据权利要求5所述的塔盘的视觉检测方法,其特征是,根据格栅条数的不同执行对应的焊点检测程序,通过格栅的边缘直线与框架内边缘直线的交点实现对目标焊接点位置的确定。7.根据权利要求6所述的塔盘的视觉检测方法,其特征是,焊点检测程序具体包括以下步骤:对亮度区域检测出中心点位置坐标,通过固定偏差半根格栅横切面的长度坐标赋值给探针框,完成对格栅的边缘直线的探测,拟合出格栅边缘直线;以格栅横切面框架外边缘的探线框为固定位置,检测出框架外边缘直线,计算得到格栅边缘的直线与框架外部的直线的交点,对计算得到的交点进行定向偏差,给出的坐标赋值给框架内边缘直线的探线框,拟合出框架内边缘直线,拟合出的框架内边缘直线再与横条横切面拟合的格栅边缘直线的交点即为目标焊接点位置坐标。
8.根据权利要求1所述的塔盘的视觉检测方法,其特征是,将目标焊接点位置坐标发送给机器人,机器人按照预设程序运动到该坐标对塔盘的焊接点进行焊接。9.一种视觉检测系统,其特征是,使用激光测距传感器测量不同塔盘种类的长度,激光测距传感器将测得的距离模拟信号接入可编程序控制系统中,可编程序控制系统对激光测距传感器传输的距离模拟信号进行判断处理,每种长度选择在不同的信号输出口进行信号输出;机器人通过从不同的信号输出口接收到不同的输出信号,执行预先设定的视觉拍照点位程序对塔盘拍照,同时触发与塔盘种类相对应的视觉检测程序;视觉拍照点位程序预设在机器人内,当机器人收到不同的输出信号时,按照视觉拍照点位程序,运动到对应塔盘种类的拍照位置,给相机提供拍照位;视觉检测程序采用权利要求1至8中任一项所述的塔盘的视觉检测方法确定目标焊接点位置坐标;视觉检测系统将确定的坐标以文本形式发送给机器人,机器人读取视觉检测系统发送的坐标文本后执行到该坐标位置进行焊接。10.一种塔盘的视觉引导自动化焊接系统,其特征是,包括权利要求9所述的视觉检测系统。
技术总结
本发明公开了一种塔盘的视觉检测方法、检测系统及其引导自动化焊接系统。塔盘的视觉检测方法中,对于塔盘采用激光测距传感器测量塔盘长度,根据长度判别塔盘种类,确定塔盘中格栅横向或纵向的方向;通过工业光源对格栅进行打光,使格栅的横切面在工业光源的照射下形成反光,拍照采集形成明暗对比的塔盘图像;结合格栅的方向,根据塔盘图像判断出格栅位置和数量,得到格栅横切面两条边缘与框架边框内边缘的交点,确定目标焊接点位置坐标。本发明的视觉检测方法针对于塔盘部件的种类数量大、面积大、焊点多的情况,可以实现对塔盘部件的种类进行准确判定,并确定相应的目标焊接点位置坐标,用以实现引导机器人对塔盘部件的焊接点进行准确焊接。行准确焊接。行准确焊接。
技术研发人员:陈建国
受保护的技术使用者:江苏塔帝思智能科技有限公司
技术研发日:2022.08.04
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。