1.本发明属于骨折复位技术领域,尤其涉及一种用于闭合复位锁骨骨折的复位装置。
背景技术:
2.随着外科技术的发展,患者对于术后美观的要求提高,微创手术越来越成为主流趋势,针对锁骨骨折这一常见骨折,微创的闭合复位弹性髓内钉技术越来越得到重视,而锁骨是不规则骨。闭合复位需要充分考虑其移位方向,肌肉牵拉,最重要是避免损伤锁骨下血管神经。然而,现有复位用巾钳复位,可以用于比较瘦弱的病人,但是对于肥胖病人无法使用,而且巾钳存在尖端断裂,导致异物存留体内可能;因锁骨的特殊形态,本人根据实际手术操作发现,应用弯钩克氏针可以有效的对于骨折进行复位,但是克氏针消毒不方便,把持力不够,定位不准确;同时,不同能提供时间、照明功能。
3.综上所述,现有技术存在的问题是:现有复位用巾钳复位,可以用于比较瘦弱的病人,但是对于肥胖病人无法使用,而且巾钳存在尖端断裂,导致异物存留体内可能;因锁骨的特殊形态,根据实际手术操作发现,应用弯钩克氏针可以有效的对于骨折进行复位,但是克氏针消毒不方便,把持力不够,定位不准确;同时,不同能提供时间、照明功能。
技术实现要素:
4.针对现有技术存在的问题,本发明提供了一种用于闭合复位锁骨骨折的复位装置。
5.本发明是这样实现的,一种用于闭合复位锁骨骨折的复位装置包括:
6.手柄、复位钩、时间表盘、led灯、电池仓、电线;
7.手柄顶端套接有复位钩;手柄正面中央嵌装有时间表盘;手柄顶端两边嵌装有led灯;手柄内通过螺丝固定有电池仓。
8.进一步,用于闭合复位锁骨骨折的复位装置的控制方法包括:
9.第一步,复位钩位置传感器采集复位状态信息;
10.第二步,提取各复位信号的动态传播路径分量;包括:选取复位钩位置传感器的第一根检测通道作为参考检测通道,将同一复位钩位置传感器其他检测通道的复位状态信息分别与参考检测通道进行共轭相乘:
11.c(m)=h(m)*h
*
(m0);
12.令m=(i,j,k),m0=(i,j0,k),j0=1,(
·
)
*
代表共轭运算,共轭相乘后将复位状态信息划分为静态路径分量和动态路径分量,分别用ps,pd表示,则共轭相乘的结果表示为:
[0013][0014]
式中第一项为静态路径分量,通过特定截止频率的带通滤波器滤除,滤波后的c(m)仅剩复位信号动态路径分量,将滤波后的复位信号动态路径分量记为h(m);
[0015]
第三步,复位参数估计算法对各复位信号的动态传播路径的信号参数进行估计;包括:将得到的复位信号动态路径分量h(m)使用改进空间交替广义期望最大sage算法对各复位信号的动态传播路径的信号参数矩阵θ=[θ1,θ2,θ3,
…
θ
l
]进行估计,l为信号传播路径的数量,其中θ
l
=[ω
l
,τ
l
,υ
l
,a
l
],由信号到达角ω
l
,信号飞行时间τ
l
,信号多普勒频移υ
l
,信号复振幅a
l
组成;
[0016]
第四步,每台复位钩位置传感器独立的对复位钩运动轨迹进行估计;包括:在估计出的l条信号传播路径的信号参数矩阵θ=[θ1,θ2,θ3,
…
,θ
l
]中识别出目标信号反射路径信号参数θ
tar
,并使用θ
tar
对复位钩运动轨迹进行跟踪定位,跟踪定位完成后对跟踪定位结果进行错误检查,如跟踪定位错误,使用人工智能算法进行纠错处理;
[0017]
第五步,使用多设备运动轨迹融合算法对第四步不同复位钩位置传感器得到的复位钩运动轨迹进行融合。
[0018]
进一步,所述第一步包括:获取复位钩位置传感器处的复位状态信息,i时刻,第j条接收检测通道上的复位状态信息h(i,j)表示为:
[0019]
h(i,j)=[h(i,j,1),h(i,j,2),...,h(i,j,k)];
[0020]
其中,j=1,
…
,m,k为子载波编号,k=1,
…
,n,m为wi-fi接收机检测通道数量,n为wi-fi接收机子载波数量。
[0021]
进一步,第四步中,在l条信号传播路径中,信号复振幅a
l
最大的信号传播路径作为目标信号反射路径,信号参数为θ
tar
=[ω
tar
,τ
tar
,υ
tar
,a
tar
]。
[0022]
进一步,使用卡尔曼滤波器求解信号反射路径距离range
p
,卡尔曼滤波器系统测量值z取信号反射路径距离τ
tar
×
c,卡尔曼滤波器系统控制量u取信号反射路径距离变化率-υ
tar
×
λ,其中c代表光速,λ为信号波长;
[0023]
卡尔曼滤波器求解的信号反射路径距离range
p
与真实信号反射路径距离range存在下列关系:
[0024]
range=range
p
dist;
[0025]
其中,dist为复位钩位置传感器接收端与发射端的直线距离,复位钩轨迹坐标(x,y)由下式导出:
[0026][0027]
其中,ψr为wi-fi接收机的检测通道方向角,(xr,yr)为wi-fi接收机坐标。
[0028]
进一步,计算复位钩运动速度v与复位钩运动速度变化率a,其中(x
′
,y
′
)为t秒前复位钩轨迹坐标,(x,y)为当前时刻复位钩轨迹坐标:
[0029][0030]
进一步,复位钩运动速度v,复位钩运动速度变化率a与正常情况下复位钩合理的运动速度v
thr
,复位钩合理的运动速度变化率a
thr
进行比较,如果v>v
thr
或者a>a
thr
,认定复位钩运动速度或者加速度产生了异常;
[0031]
支持向量机svm提取发生v>v
thr
或者a>a
thr
时的时间范围t,作为复位钩运动速度/加速度异常时间区间;
[0032]
对时间范围t内的信号参数矩阵θ=[θ1,θ2,θ3,
…
,θ
l
],选用信号复振幅a
l
第i 1大的信号路径作为目标信号反射路径,i初值为1,对时间范围t内的复位钩运动轨迹进行重新计算;
[0033]
上一步的计算结果称之为新轨迹,未经上一步重新计算的复位钩运动轨迹称之为旧轨迹,将新旧轨迹进行拼接;
[0034]
得到纠错后的复位钩运动轨迹。
[0035]
进一步,使用多设备运动轨迹融合算法对第四步不同复位钩位置传感器得到的复位钩运动轨迹进行融合;包括:
[0036]
计算第i台复位钩位置传感器得到的复位钩运动轨迹置信度ξi,其中,u
1 u2是与环境有关的常数值,υ
i,tar
和ω
i,tar
为第i台复位钩位置传感器目标信号反射路径的信号多普勒频移和信号到达角;
[0037][0038]
进一步,由复位钩运动轨迹坐标置信度ξi得第i台复位钩位置传感器复位钩运动轨迹动态权重u
′i,其中r为参与复位钩运动轨迹跟踪的复位钩位置传感器总数:
[0039][0040]
使用动态权重u
′i对每台复位钩位置传感器计算得到的复位钩运动轨迹(xi,yi)进行动态加权融合,得到融合后的运动轨迹(x,y):
[0041][0042]
进一步,所述电池仓右端通过电线分别连接时间表盘、led灯。
[0043]
本发明的优点及积极效果为:本发明具备易操作,消毒方便,反复利用,不易损伤血管神经,微创操作等特点;同时,通过时间表盘提供时间信息;通过led灯提供照明;更加方便,实用;极大的提高了闭合复位髓内钉固定锁骨骨折的可操作性;使微创手术的得以更好的推广,同时该发明材料简易,经济效益良好。
[0044]
本发明用于闭合复位锁骨骨折的复位装置的控制方法包括:
[0045]
第一步,复位钩位置传感器采集复位状态信息;
[0046]
第二步,提取各复位信号的动态传播路径分量;包括:选取复位钩位置传感器的第
一根检测通道作为参考检测通道,将同一复位钩位置传感器其他检测通道的复位状态信息分别与参考检测通道进行共轭相乘:
[0047]
第三步,复位参数估计算法对各复位信号的动态传播路径的信号参数进行估计;包括:将得到的复位信号动态路径分量h(m)使用改进空间交替广义期望最大sage算法对各复位信号的动态传播路径的信号参数矩阵θ=[θ1,θ2,θ3,
…
θ
l
]进行估计,l为信号传播路径的数量,其中θ
l
=[ω
l
,τ
l
,υ
l
,a
l
],由信号到达角ω
l
,信号飞行时间τ
l
,信号多普勒频移υ
l
,信号复振幅a
l
组成;
[0048]
第四步,每台复位钩位置传感器独立的对复位钩运动轨迹进行估计;包括:在估计出的l条信号传播路径的信号参数矩阵θ=[θ1,θ2,θ3,
…
,θ
l
]中识别出目标信号反射路径信号参数θ
tar
,并使用θ
tar
对复位钩运动轨迹进行跟踪定位,跟踪定位完成后对跟踪定位结果进行错误检查,如跟踪定位错误,使用人工智能算法进行纠错处理;
[0049]
第五步,使用多设备运动轨迹融合算法对第四步不同复位钩位置传感器得到的复位钩运动轨迹进行融合。实现了智能控制。
附图说明
[0050]
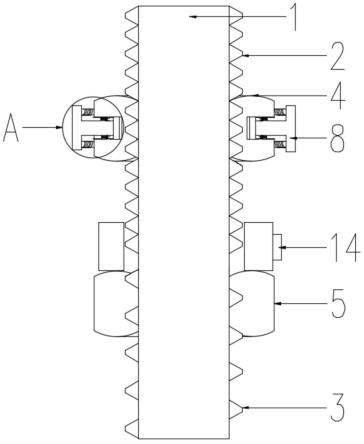
图1是本发明实施例提供的用于闭合复位锁骨骨折的复位装置结构框图。
[0051]
图2是本发明实施例提供的手柄结构框图。
[0052]
图1和图2中:1、手柄;2、复位钩;3、时间表盘;4、led灯;5、电池仓;6、电线。
具体实施方式
[0053]
为能进一步了解本发明的发明内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下。
[0054]
下面结合附图对本发明的结构作详细的描述。
[0055]
如图1和图2所示,本发明实施例提供的用于闭合复位锁骨骨折的复位装置包括:手柄1、复位钩2、时间表盘3、led灯4、电池仓5、电线6;
[0056]
手柄1顶端套接有复位钩2;手柄1正面中央嵌装有时间表盘3;手柄1顶端两边嵌装有led灯4;手柄1内通过螺丝固定有电池仓5;电池仓5右端通过电线6分别连接时间表盘3、led灯4。
[0057]
本发明工作时,将电池放入电池仓5进行供电,通过时间表盘3查看时间;通过led灯4进行照明;通过复位钩2对患者锁骨骨折部位进行复位。
[0058]
实施例
[0059]
用于闭合复位锁骨骨折的复位装置的控制方法包括:
[0060]
第一步,复位钩位置传感器采集复位状态信息;
[0061]
第二步,提取各复位信号的动态传播路径分量;包括:选取复位钩位置传感器的第一根检测通道作为参考检测通道,将同一复位钩位置传感器其他检测通道的复位状态信息分别与参考检测通道进行共轭相乘:
[0062]
c(m)=h(m)*h
*
(m0);
[0063]
令m=(i,j,k),m0=(i,j0,k),j0=1,(
·
)
*
代表共轭运算,共轭相乘后将复位状态信息划分为静态路径分量和动态路径分量,分别用ps,pd表示,则共轭相乘的结果表示为:
[0064][0065]
式中第一项为静态路径分量,通过特定截止频率的带通滤波器滤除,滤波后的c(m)仅剩复位信号动态路径分量,将滤波后的复位信号动态路径分量记为h(m);
[0066]
第三步,复位参数估计算法对各复位信号的动态传播路径的信号参数进行估计;包括:将得到的复位信号动态路径分量h(m)使用改进空间交替广义期望最大sage算法对各复位信号的动态传播路径的信号参数矩阵θ=[θ1,θ2,θ3,
…
θ
l
]进行估计,l为信号传播路径的数量,其中θ
l
=[ω
l
,τ
l
,υ
l
,a
l
],由信号到达角ω
l
,信号飞行时间τ
l
,信号多普勒频移υ
l
,信号复振幅a
l
组成;
[0067]
第四步,每台复位钩位置传感器独立的对复位钩运动轨迹进行估计;包括:在估计出的l条信号传播路径的信号参数矩阵θ=[θ1,θ2,θ3,
…
,θ
l
]中识别出目标信号反射路径信号参数θ
tar
,并使用θ
tar
对复位钩运动轨迹进行跟踪定位,跟踪定位完成后对跟踪定位结果进行错误检查,如跟踪定位错误,使用人工智能算法进行纠错处理;
[0068]
第五步,使用多设备运动轨迹融合算法对第四步不同复位钩位置传感器得到的复位钩运动轨迹进行融合。
[0069]
所述第一步包括:获取复位钩位置传感器处的复位状态信息,i时刻,第j条接收检测通道上的复位状态信息h(i,j)表示为:
[0070]
h(i,j)=[h(i,j,1),h(i,j,2),...,h(i,j,k)];
[0071]
其中,j=1,
…
,m,k为子载波编号,k=1,
…
,n,m为wi-fi接收机检测通道数量,n为wi-fi接收机子载波数量。
[0072]
第四步中,在l条信号传播路径中,信号复振幅a
l
最大的信号传播路径作为目标信号反射路径,信号参数为θ
tar
=[ω
tar
,τ
tar
,υ
tar
,a
tar
]。
[0073]
使用卡尔曼滤波器求解信号反射路径距离range
p
,卡尔曼滤波器系统测量值z取信号反射路径距离τ
tar
×
c,卡尔曼滤波器系统控制量u取信号反射路径距离变化率-υ
tar
×
λ,其中c代表光速,λ为信号波长;
[0074]
卡尔曼滤波器求解的信号反射路径距离range
p
与真实信号反射路径距离range存在下列关系:
[0075]
range=range
p
dist;
[0076]
其中,dist为复位钩位置传感器接收端与发射端的直线距离,复位钩轨迹坐标(x,y)由下式导出:
[0077][0078]
其中,ψr为wi-fi接收机的检测通道方向角,(xr,yr)为wi-fi接收机坐标。
[0079]
计算复位钩运动速度v与复位钩运动速度变化率a,其中(x
′
,y
′
)为t秒前复位钩轨迹坐标,(x,y)为当前时刻复位钩轨迹坐标:
[0080][0081]
复位钩运动速度v,复位钩运动速度变化率a与正常情况下复位钩合理的运动速度v
thr
,复位钩合理的运动速度变化率a
thr
进行比较,如果v>v
thr
或者a>a
thr
,认定复位钩运动速度或者加速度产生了异常;
[0082]
支持向量机svm提取发生v>v
thr
或者a>a
thr
时的时间范围t,作为复位钩运动速度/加速度异常时间区间;
[0083]
对时间范围t内的信号参数矩阵θ=[θ1,θ2,θ3,
…
,θ
l
],选用信号复振幅a
l
第i 1大的信号路径作为目标信号反射路径,i初值为1,对时间范围t内的复位钩运动轨迹进行重新计算;
[0084]
上一步的计算结果称之为新轨迹,未经上一步重新计算的复位钩运动轨迹称之为旧轨迹,将新旧轨迹进行拼接;
[0085]
得到纠错后的复位钩运动轨迹。
[0086]
使用多设备运动轨迹融合算法对第四步不同复位钩位置传感器得到的复位钩运动轨迹进行融合;包括:
[0087]
计算第i台复位钩位置传感器得到的复位钩运动轨迹置信度ξi,其中,u
1 u2是与环境有关的常数值,υ
i,tar
和ω
i,tar
为第i台复位钩位置传感器目标信号反射路径的信号多普勒频移和信号到达角;
[0088][0089]
由复位钩运动轨迹坐标置信度ξi得第i台复位钩位置传感器复位钩运动轨迹动态权重u
′i,其中r为参与复位钩运动轨迹跟踪的复位钩位置传感器总数:
[0090][0091]
使用动态权重u
′i对每台复位钩位置传感器计算得到的复位钩运动轨迹(xi,yi)进行动态加权融合,得到融合后的运动轨迹(x,y):
[0092][0093]
以上所述仅是对本发明的较佳实施例而已,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所做的任何简单修改,等同变化与修饰,均属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。