1.本实用新型涉及测距设备技术领域,具体涉及一种用于自动驾驶车辆的测距装置。
背景技术:
2.随着社会的发展,汽车作为人类主要的代步工具,正在渐渐成为人们生活中必不可少的一部分,但是随之而来的交通事故也越来越引起人们的重视。为了减少车辆碰撞造成的交通事故,各汽车制造商采用各种测距方式来测量与其他车辆或物品之间的距离,将检测到的距离信息传送至汽车的控制器中,供驾驶人员参考或在自动驾驶中汽车控制器能根据测距装置返回的信号实现自动驾驶,目前,常用的车载测距装置有红外探测装置、毫米波传感器或激光雷达等。
3.例如公开号cn212301890u的中国专利,其中提出了一种车载测距装置,该专利可以根据汽车驾驶者的实际需要将雷达收入或伸出车内,通过在车内设置螺套旋钮来实现激光雷达座的高度调整,通过在雷达座上设置导向机构实现雷达座的直线运动,但是该方案中雷达探测是固定一个方向的,对后方测距有所缺失,从而导致测距方向单一的问题。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种用于自动驾驶车辆的测距装置,解决了雷达探测是固定一个方向的,对后方测距有所缺失,从而导致测距方向单一的问题。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:
6.一种用于自动驾驶车辆的测距装置,包括:支撑臂,所述支撑臂的内部一侧设置有测距仪,所述支撑臂的底面设置有支撑座,所述支撑座的底面设置有第一防护罩,所述第一防护罩的一侧设置有防护板,所述防护板的底面设置有底座,所述底座的顶面开设有若干个底座孔;旋转组件,所述旋转组件设置在支撑臂的底面,用于带动测距仪进行旋转,所述旋转组件包括:旋转柱,所述旋转柱固定安装在所述支撑臂的底面,所述旋转柱的底面固定安装有旋转脚,所述支撑座的顶面开设有支撑孔,所述旋转柱与所述支撑孔活动套接,所述底座的顶面固定安装有限位座,所述限位座的顶面开设有限位孔,所述旋转柱与所述限位孔活动套接,所述限位座的底面设置有齿轮,所述齿轮的顶面开设有齿轮孔,所述旋转柱与所述齿轮孔活动套接,所述底座的顶面开设有旋转孔,所述旋转脚与所述旋转孔活动套接,所述底座的顶面固定安装有第二步进电机,所述第二步进电机的驱动轴的外圆壁面固定安装有传送齿轮,所述传送齿轮与所述齿轮啮合。
7.为了防止旋转组件短路、漏电,作为本实用新型的一种用于自动驾驶车辆的测距装置,较佳的,所述支撑座的底面设置有塑料环,所述旋转柱与所述塑料环活动套接,所述塑料环的外圆壁面固定套接有两个受电环,所述底座的顶面固定安装有支撑件,所述支撑件的一侧固定安装有塑料块,所述塑料块的内部一侧固定安装有两个导电片。
8.为了对测距仪和无线传输模块进行供电,作为本实用新型的一种用于自动驾驶车
辆的测距装置,较佳的,所述塑料块的内部一侧固定安装有两个弹簧柱,所述弹簧柱的外圆壁面活动套接有弹簧,所述弹簧与所述导电片固定安装,所述导电片的一侧开设有弹簧孔,所述弹簧柱与所述弹簧孔活动套接。
9.为了调节测距仪的俯视角度,作为本实用新型的一种用于自动驾驶车辆的测距装置,较佳的,所述测距仪的一侧开设有电机槽,所述电机槽的内部固定套接有第一步进电机,所述第一步进电机的驱动轴承与所述支撑臂固定安装。
10.为了减少树叶等异物覆盖住测距仪的超声波发射和接受装置,作为本实用新型的一种用于自动驾驶车辆的测距装置,较佳的,所述测距仪的顶面固定安装有第二防护罩。
11.为了达到不需线缆即可将测距数据传回自动驾驶控制设备的效果,作为本实用新型的一种用于自动驾驶车辆的测距装置,较佳的,所述测距仪的顶面固定安装有无线传输模块。
12.为了降低旋转组件风吹日晒所受到的损害,作为本实用新型的一种用于自动驾驶车辆的测距装置,较佳的,所述防护板的一侧开设有若干个固定孔,所述第一防护罩的一侧开设有若干个螺丝孔,所述第一防护罩的一侧设置有若干个螺丝,所述螺丝穿过所述固定孔的内圆壁面与所述螺丝孔螺纹连接。
13.综上所述,本实用新型主要具有以下有益效果:
14.通过设置的受电环、导电片、塑料环和塑料块,当受电环、导电片带电时塑料环和塑料块可以防止短路,而后通过弹簧、弹簧柱、导电片和受电环的配合使用,可以对测距仪和无线传输模块等进行供电,进而通过无线传输模块的使用,可以达到不需线缆即可将测距数据传回自动驾驶控制设备的效果,而后通过设置的控制模块控制第二步进电机的旋转轴旋转继而控制测距仪旋转,通过第二步进电机、齿轮、旋转柱和支撑臂的配合使用,可以达到测距仪进行前后左右任意水平角度进行旋转的效果,达到旋转测距的效果。
15.通过设置的防护板、第一防护罩、固定孔、螺丝和螺丝孔的配合使用,可以降低旋转组件风吹日晒所受到的损害。
附图说明
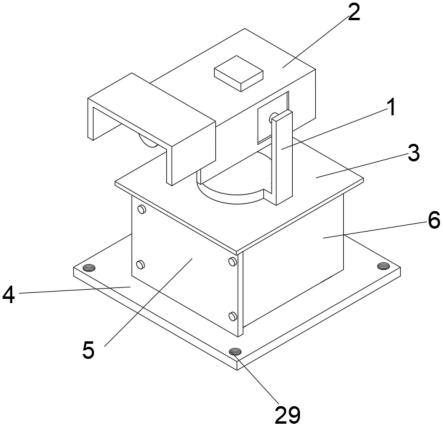
16.图1是本实用新型的立体结构示意图;
17.图2是本实用新型的限位座结构示意图;
18.图3是本实用新型的测距仪结构示意图;
19.图4是本实用新型的支撑件结构示意图;
20.图5是本实用新型的塑料环结构示意图;
21.图6为图4中a的局部结构示意图;
22.图7为图5中b的局部结构示意图。
23.附图标记:1、支撑臂;2、测距仪;3、支撑座;4、底座;5、防护板;6、第一防护罩;7、无线传输模块;8、电机槽;9、第一步进电机;10、第二防护罩;11、旋转柱;12、塑料环;13、受电环;14、导电片;15、塑料块;16、支撑件;17、弹簧;18、弹簧柱;19、弹簧孔;20、齿轮;21、固定孔;22、螺丝;23、旋转孔;24、限位孔;25、齿轮孔;26、限位座;27、支撑孔;28、旋转脚;29、底座孔;30、螺丝孔;31、第二步进电机。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.参考图1、图2、图4和图5,一种用于自动驾驶车辆的测距装置,包括支撑臂1,所述支撑臂1的内部一侧设置有测距仪2,支撑臂1的底面设置有支撑座3,支撑座3的底面设置有第一防护罩6,第一防护罩6的一侧设置有防护板5,防护板5的底面设置有底座4,底座4的顶面开设有若干个底座孔29,支撑臂1的底面设置有旋转组件,用于带动测距仪2进行旋转,旋转组件包括旋转柱11,旋转柱11固定安装在支撑臂1的底面,旋转柱11的底面固定安装有旋转脚28,支撑座3的顶面开设有支撑孔27,旋转柱11与支撑孔27活动套接,底座4的顶面固定安装有限位座26,限位座26的顶面开设有限位孔24,旋转柱11与限位孔24活动套接,限位座26的底面设置有齿轮20,齿轮20的顶面开设有齿轮孔25,旋转柱11与齿轮孔25活动套接,底座4的顶面开设有旋转孔23,旋转脚28与旋转孔23活动套接,底座4的顶面固定安装有第二步进电机31,第二步进电机31的驱动轴的外圆壁面固定安装有传送齿轮,传送齿轮与齿轮20啮合。
26.参考图2、图3、图4、图5、图6和图7,支撑座3的底面设置有塑料环12,旋转柱11与塑料环12活动套接,塑料环12的外圆壁面固定套接有两个受电环13,底座4的顶面固定安装有支撑件16,支撑件16的一侧固定安装有塑料块15,塑料块15的内部一侧固定安装有两个导电片14,塑料块15的内部一侧固定安装有两个弹簧柱18,弹簧柱18的外圆壁面活动套接有弹簧17,弹簧17与导电片14固定安装,导电片14的一侧开设有弹簧孔19,弹簧柱18与弹簧孔19活动套接,测距仪2的一侧开设有电机槽8,电机槽8的内部固定套接有第一步进电机9,第一步进电机9的驱动轴承与支撑臂1固定安装,测距仪2的顶面固定安装有第二防护罩10,通过设置的第二防护罩10,第二防护罩10对测距仪2的发射和接受装置进行防护,通过设置的螺丝22,螺丝22将防护板5和第一防护罩6牢牢地固定在一起,测距仪2的顶面固定安装有无线传输模块7,防护板5的一侧开设有若干个固定孔21,第一防护罩6的一侧开设有若干个螺丝孔30,第一防护罩6的一侧设置有若干个螺丝22,螺丝22穿过固定孔21的内圆壁面与螺丝孔30螺纹连接。
27.工作原理:请参考图1-图7所示,通过设置的第二步进电机31,控制模块控制第二步进电机31的旋转轴旋转带动齿轮20、旋转柱11和支撑臂1旋转,支撑臂1继而带动测距仪2旋转,通过设置的塑料环12,由于塑料环12和塑料块15塑料材质,当受电环13和导电片14导电时,塑料环12和塑料块15不可导电,通过设置的弹簧17,弹簧具有弹力,弹簧17推动导电片14贴合在受电环13的外圆壁面上,电路通过导电片14传导到受电环13上,受电环13再和导线连接将电传导至测距仪2和无线传输模块7,通过设置的无线传输模块7将与自动驾驶控制设备进行无线传输,接着通过设置的第一步进电机9,控制模块通过无线传输模块7控制第一步进电机9的驱动轴旋转,进而对测距仪2的俯视角度进行调节。
28.通过设置的第二防护罩10,第二防护罩10对测距仪2的发射和接受装置进行防护,通过设置的螺丝22,螺丝22将防护板5和第一防护罩6牢牢地固定在一起。
29.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,
可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
