1.本技术涉及一种倒运装置,具体涉及一种模拟机盘台倒运装置。
背景技术:
2.核电站模拟机盘台的主要功能是为操纵员提供一个进行培训和许可证考核的平台。为了提高模拟效果,模拟机房与主控室1:1设计,操纵员可通过高温堆的操作规程在模拟机盘台上进行相同操作,其显现出的效果与主控室完全一致。模拟机盘台的尺寸为长2700mm*宽800mm*高3270mm,且每台模拟机盘台重量达到1.6吨。在布置模拟机房时,需要将模拟盘台安装于400mm高的槽钢基础上并焊接固定,然而模拟机房的高度仅有6000mm,可操作的空间小,导致模拟机盘台安装难度大。
技术实现要素:
3.本技术的目的是提供一种模拟机盘台倒运装置,可以解决现有技术中模拟机盘台安装困难的问题。
4.本技术实施例提供一种模拟机盘台倒运装置,包括:
5.门式架,包括吊梁结构及支撑于吊梁结构两端的支腿;
6.起重模块,设于所述吊梁结构上,用于吊升位于其下方的模拟机盘台;
7.车轮,设于所述支腿的底部,用于旋转以移动所述门式架。
8.在一些可选实施例中,所述吊梁结构包括:
9.矩形框架;
10.至少一个承重梁,沿所述矩形框架的长度方向,设于所述矩形框架上;
11.多个支撑梁,沿所述矩形框架的宽度方向,连接于所述矩形框架及所述承重梁之间;
12.吊环,设于所述承重梁上,所述起重模块设于所述吊环上。
13.在一些可选实施例中,所述承重梁的数量为两个,两个所述承重梁间连接有所述支撑梁。
14.在一些可选实施例中,所述支腿数量为四个,且分别设于所述矩形框架的各个拐角。
15.在一些可选实施例中,沿所述矩形框架的宽度方向,两个所述支腿之间连接有横向支撑。
16.在一些可选实施例中,所述支腿与所述矩形框架间设有加强肋板。
17.在一些可选实施例中,所述支腿为倒t型设计,所述支腿包括:
18.立柱;
19.横杆,设于所述立柱的底部,所述横杆上设有至少一个所述车轮;
20.斜支撑,设于所述立柱与所述横杆及所述矩形框架之间。
21.在一些可选实施例中,所述车轮采用万向轮。
22.在一些可选实施例中,所述门式架的尺寸为长4200mm*宽3000mm*高4050mm。
23.在一些可选实施例中,所述模拟机盘台上设有吊耳,所述起重模块的数量与所述吊耳的数量相同,且所述起重模块的位置与所述吊耳的位置上下相对应。
24.本技术的上述技术方案具有如下有益的技术效果:
25.本技术实施例的模拟机盘台倒运装置,其包括可移动的门式架和安装于门式架上的起重模块,该门式架可以通过起重模块吊升模拟机盘台,以实现对模拟机盘台的抓取,再通过移动门式架以实现模拟机盘台的倒运。同时,起重模块在抓取模拟机盘台的同时,还可以调整模拟机盘台的高度,使其满足安装高度要求。
附图说明
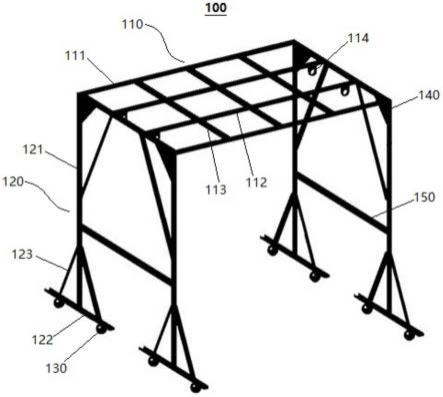
26.图1是本技术示例性实施例中一种模拟机盘台倒运装置的结构示意图;
27.图中,100、门式架;110、吊梁结构;111、矩形框架;112、承重梁;113、支撑梁;114、吊环;120、支腿;121、立柱;122、横杆;123、斜支撑;130、车轮;140、加强肋板;150、横向支撑。
具体实施方式
28.为使本技术的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本技术进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本技术的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本技术的概念。
29.在附图中示出了根据本技术实施例的层结构示意图。这些图并非是按比例绘制的,其中为了清楚的目的,放大了某些细节,并且可能省略了某些细节。图中所示出的各种区域、层的形状以及它们之间的相对大小、位置关系仅是示例性的,实际中可能由于制造公差或技术限制而有所偏差,并且本领域技术人员根据实际所需可以另外设计具有不同形状、大小、相对位置的区域/层。
30.显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
31.此外,下面所描述的本技术不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
32.下面结合附图,通过具体的实施例对本技术实施例提供的模拟机盘台倒运装置进行详细地说明。
33.如图1所示,本技术实施例提供一种模拟机盘台倒运装置,包括:
34.门式架100,包括吊梁结构110及支撑于吊梁结构110两端的支腿120;
35.起重模块(图中未示出),设于吊梁结构110上,用于吊升位于其下方的模拟机盘台;
36.车轮130,设于支腿120的底部,用于旋转以移动门式架100。
37.其中,起重模块采用起重葫芦或者卷扬机。可选地,起重葫芦可以是手拉葫芦、手板葫芦、电动葫芦、气动葫芦、液动葫芦等;卷扬机可以是卷绕式卷扬机、摩擦式卷扬机等。
在本实施例中,起重模块优选起重葫芦。
38.在具体应用中,上述模拟机盘台倒运装置,其该门式架100可以通过起重模块吊升模拟机盘台,以实现对模拟机盘台的抓取,再通过移动门式架100以实现模拟机盘台的倒运。同时,起重模块在抓取模拟机盘台的同时,还可以调整模拟机盘台的高度,使其满足安装高度要求。
39.在一些实施例中,吊梁结构110包括:矩形框架111;至少一个承重梁112,沿矩形框架111的长度方向,设于矩形框架111上;多个支撑梁113,沿矩形框架111的宽度方向,连接于矩形框架111及承重梁112之间;吊环114,设于承重梁112上,起重模块设于吊环114上。在本实施例中,矩形框架111、承重梁112和支撑梁113均优选为10#槽钢。
40.示例性的,吊梁结构110的制作方法为:采用10#槽钢,焊接形成长4200mm、宽3000mm的矩形框架111;沿矩形框架111的长度方向,在矩形框架111内部居中位置焊接10#槽钢形成承重梁112,承重梁112两端与矩形框架111满焊固定;沿矩形框架111的宽度方向,在矩形框架111和承重梁112之间焊接10#槽钢形成支撑梁113,支撑梁113两端分别与矩形框架111和承重梁112满焊固定,一共焊接三道支撑梁113,三道支撑梁113设置于矩形框架111长度边的1100mm、2100mm、3100mm位置处;根据起重模块的位置及安装位置,在承重梁112上设置吊环114。
41.在一些实施例中,承重梁112的数量为两个,两个承重梁112间连接有支撑梁113。具体地,模拟机盘台的重量可以由多个承重梁112共同负担,不仅可以减小单个承重梁112的负担,还可以使吊梁结构110的受力更均匀,从而避免应力集中,影响装置的稳定性。
42.在一些实施例中,支腿120数量为四个,且分别设于矩形框架111的各个拐角。
43.在一些实施例中,沿矩形框架111的宽度方向,两个支腿120之间连接有横向支撑150。在本实施例中,横向支撑150均优选为10#槽钢。
44.在一些实施例中,支腿120与矩形框架111间设有加强肋板140。例如,加强肋板140可以设置在支腿120与矩形框架111的长度边之间,也可以设置在支腿120与矩形框架111的宽度边之间,也可以在两处均设置加强肋板140。
45.在一些实施例中,支腿120为倒t型设计,支腿120包括:立柱121;横杆122,设于立柱121的底部,横杆122上设有至少一个车轮130;斜支撑123,设于立柱121与横杆122及矩形框架111之间。其中,为了提高结构稳定性,沿矩形框架111的宽度方向,两个支腿120的立杆之间连接有横向支撑150。在本实施例中,立柱121、横杆122均优选为10#槽钢,斜支撑123优选为63mm*3mm的等边角钢。
46.在一些实施例中,车轮130采用万向轮,万向轮可以起到转向的作用,方便模拟机盘台的倒运。
47.在一些实施例中,门式架100的尺寸为长4200mm*宽3000mm*高4050mm。该尺寸的门式架100可以在实现模拟机盘台倒运的同时,保证其能够在模拟机房内活动,从而将模拟机盘台倒运至机房预定位置。
48.在一些实施例中,模拟机盘台上设有吊耳,起重模块的数量与吊耳的数量相同,且起重模块的位置与吊耳的位置上下相对应。例如,模拟机盘台上设有四个呈矩形分布的吊耳,每个吊耳由一个起重葫芦负责吊升,根据起重葫芦的安装位置可以确定承重梁112及吊环114的位置。
49.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。