1.本公开的实施例涉及车辆骑行技术领域,尤其涉及一种停车带。
背景技术:
2.近些年共享单车、共享电动车以及电单车等车辆的蓬勃发展,虽然方便了市民出行,但是杂乱无章地乱停乱放也妨碍交通、影响城市的整体形象。为了解决车辆乱序停放,对车辆设置定点停车,也即用户需要在规定区域和规定方向进行车辆的还车。
3.目前,车辆的定点停车普遍使用卫星单点定位技术。卫星单点定位技术需要在空旷环境中进行使用,而空旷环境定位精度10米左右,且车辆的还车的电子围栏冗余度也必须大于10米才能保障用户正常还车。另外卫星定位受环境影响较大,例如易受周围高楼、树木等环境影响,从而导致卫星信号变弱、被干扰导致定位失败或者定位误差较大。实际运营难以做到精准停车,仍会存在乱停乱放问题。
4.蓝牙定位技术能将定位精度提升到亚米级精度,对定点停车能有一定改善。但蓝牙定位技术采用rssi(received signal strength indication,接收的信号强度指示)技术,也即蓝牙定位技术是根据无线电信号强度随着距离增大而有规律的衰减的原理来测量设备间的距离,通过两个蓝牙设备(车辆)之间的距离与接收信号强度指示(接收功率)之间的关系,计算出信号传输损耗并换算为距离值,最后通过计算距离值的大小判断是否停车成功。
5.然而,现有蓝牙定位技术采用的天线多为内置全向天线,虽然单天线方位面圆度较好,利用全向性可以和来自四面八方的其他蓝牙产品相互联系,但是在rssi定位应用场景中,单天线位于车辆的中控内部,车体金属遮挡等环境会影响实际天线场型,导致车辆难以实现精准停车。
技术实现要素:
6.本公开的实施例提供一种停车带,旨在实现车辆的精准停车。
7.一方面,本公开的实施例提供一种停车带,包括:
8.安装层;
9.蓝牙模块,设于所述安装层;
10.若干蓝牙天线,均设于所述安装层;
11.至少一个射频开关,设于所述安装层,所述射频开关连接所述蓝牙模块,且所述蓝牙模块通过所述射频开关依次连接每个所述蓝牙天线进行蓝牙信号的发射和/或接收;
12.供电模块,设于所述安装层,所述供电模块与所述蓝牙模块连接。
13.在一实施例中,各个所述蓝牙天线在所述安装层上排列成一列,且每个所述蓝牙天线的信号发射方向与各个所述蓝牙天线的排列方向垂直。
14.在一实施例中,所述蓝牙天线之间的排列间距小于蓝牙信号的自由空间波长。
15.在一实施例中,所述停车带设有保护层,所述保护层与所述安装层合围构成安装
空间,所述蓝牙模块、所述蓝牙天线、所述射频开关以及供电模块位于所述安装空间内。
16.在一实施例中,所述保护层包括粘合层、第一胶水层以及保护膜,所述粘合层的一表面通过所述第一胶水层与所述安装层合围构成安装空间,所述粘合层的另一表面上设置所述保护膜。
17.在一实施例中,所述停车带设有第二胶水层,所述第二胶水层的一表面粘接所述安装层,所述第二胶水层的另一表面用于粘接地面。
18.在一实施例中,所述供电模块为太阳能充电模块。
19.在一实施例中,所述供电模块可拆卸的设于所述安装层。
20.在一实施例中,每个所述蓝牙天线连接一个射频开关。
21.在一实施例中,所述蓝牙天线是偶极子天线阵列。
22.本公开的实施例提供的停车带包括安装层、设置于安装层的若干蓝牙模块、蓝牙天线、至少一个射频开关以及供电模块,蓝牙模块连接射频开关以及供电模块,且蓝牙模块通过射频开关依次连接每个蓝牙天线进行蓝牙信号的发射和/或接收。本公开中,发射信号的各个蓝牙天线设置于停车带,不会有金属遮挡导致实际天线场型受到影响,提高了车辆的停车精度。此外,车辆发送的信号供停车带的每个蓝牙天线接收,即便是金属遮挡导致影响蓝牙信号,但停车带每个蓝牙天线接收到的蓝牙信号是受到同等的影响,对于车辆最终的停车位置以及停车角度的确定并不会有所影响,提高了车辆的停车精度。
附图说明
23.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
24.图1为本公开的实施例涉及的停车带的一结构示意图;
25.图2为本公开的实施例涉及的停车带的俯视图;
26.图3为本公开的实施例涉及的蓝牙天线的信号发射方向示意图;
27.图4为本公开的实施例涉及的停车带的爆炸图;
28.图5为本公开车辆的停车示意图。
29.附图标记说明:
30.100-停车带;
31.110-安装层,120-蓝牙模块,130-蓝牙天线,140-射频开关,150-供电模块;
32.160-保护层,161-粘合层,162-第一胶水层,163-保护膜;
33.170-第二胶水层。
具体实施方式
34.为使本公开的目的、技术方案和优点更加清楚,下面将结合本公开的优选实施例中的附图,对本公开实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的部件或具有相同或类似功能的部件。所描述的实施例是本公开一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本公开,而不能理解为对本公开的限制。基于本公开中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
下面结合附图对本公开的实施例进行详细说明。
35.在本公开的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应作广义理解,例如,可以使固定连接,也可以是通过中间媒介间接相连,可以是两个元件内部的连通或者两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本公开中的具体含义。
36.在本公开的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或者位置关系为基于附图的方位或位置关系,仅是为了便于描述本公开和简化描述,而不是指示或者暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本公开的限制。
37.本公开的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本公开的实施例例如能够以除了在这里图示或描述的那些以外的顺序实施。
38.此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或显示器不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或显示器固有的其它步骤或单元。
39.本公开提供一种停车带。
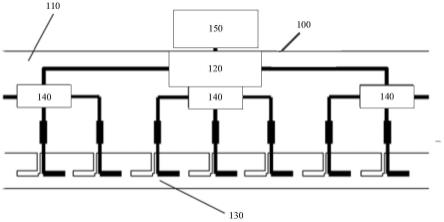
40.参照图1以及图2,停车带100包括安装层110,安装层110设有蓝牙模块120、若干蓝牙天线130、至少一个射频开关140以及供电模块150。
41.蓝牙模块120连接供电模块150,供电模块150用于向蓝牙模块120供电。
42.蓝牙模块120与射频开关140连接,且蓝牙模块120通过射频开关140依次连接每个蓝牙天线130。各个蓝牙天线130可以仅发射蓝牙信号,也可以仅接收蓝牙信号,或者各个蓝牙天线即可发射蓝牙信号,也可接收蓝牙信号。蓝牙模块120通过射频开关140依次连接各个蓝牙天线130进行蓝牙信号的发射或者接收。蓝牙天线130可以是偶极子天线阵列。
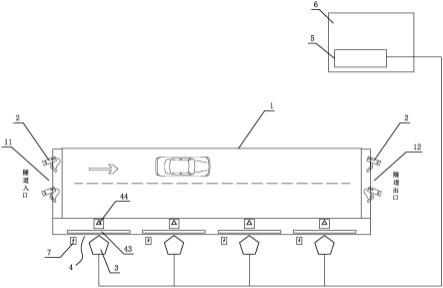
43.在本实施例中,停车带100设置于车辆的停车区域,车辆可以是共享车辆,共享车辆例如为共享单车、共享电动车等。车辆中设有蓝牙模块。车辆在进行停车时,停车带100中的蓝牙模块120与车辆中的蓝牙模块进行蓝牙连接,且停车带100中的蓝牙模块120通过射频开关130依次连接每个蓝牙天线130,从而使得蓝牙天线130依次发射蓝牙信号。车辆可以接收蓝牙信号,并检测蓝牙信号的幅值以及相位,车辆即可通过各个蓝牙天线发射的蓝牙信号的幅值以及相位即可计算出车辆与停车带之间的距离,基于距离可以确定车辆是否位于停车带100所在的停车区域。进一步,车辆可以根据任意两个蓝牙天线130发射的蓝牙信号的相位确定车辆的停车角度。一般而言,车辆需要进行90度停车,也即车辆需要垂直马路进行停车,若是停车角度不满足90度停车,即可确定车辆停车不规范,车辆则向骑行车辆的用户的终端发送停车指引信息,以通过停车指引信息规范车辆的停车。
44.此外,车辆在进行停车时,可向外部发射蓝牙信号。停车带100的蓝牙模块120依次控制每个蓝牙天线130接收蓝牙信号,且蓝牙模块120依次检测每个蓝牙天线130接收的蓝牙信号的幅值以及相位。蓝牙模块120即可通过各个蓝牙天线接收的蓝牙信号的幅值以及相位即可计算出车辆与停车带之间的距离,基于距离可以确定车辆是否位于停车带100所
在的停车区域。进一步,蓝牙模块120可以根据任意两个蓝牙天线130接收的蓝牙信号的相位确定车辆的停车角度。一般而言,车辆需要进行90度停车,也即车辆需要垂直马路进行停车,若是停车角度不满足90度停车,即可确定车辆停车不规范,车辆则向骑行车辆的用户的终端发送停车指引信息,以通过停车指引信息规范车辆的停车。
45.需要说明的是,上述90度停车仅仅是为了举例,车辆的停车角度规范包括但不限于90度停车。
46.在本实施例中,停车带包括安装层、设置于安装层的若干蓝牙模块、蓝牙天线、至少一个射频开关以及供电模块,蓝牙模块连接射频开关以及供电模块,且蓝牙模块通过射频开关依次连接每个蓝牙天线进行蓝牙信号的发射和/或接收。发射信号的各个蓝牙天线设置于停车带,不会有金属遮挡导致实际天线场型受到影响,提高了车辆的停车精度。此外,车辆发送的信号供停车带的每个蓝牙天线接收,即便是金属遮挡导致影响蓝牙信号,但停车带每个蓝牙天线接收到的蓝牙信号是受到同等的影响,对于车辆最终的停车位置以及停车角度的确定并不会有所影响,提高了车辆的停车精度。
47.参照图3,各个蓝牙天线130在安装层110上排列成一列,且每个蓝牙天线的信号发射方向(参照图3的天线波束)与各个蓝牙天线130的排列方向垂直。通过此种方式,可以便于车辆的停车角度的计算。具体的,停车带100获取任意两个蓝牙天线130之间的距离d,且任意两个蓝牙天线130接收车辆发送的蓝牙信号的相位差为δ为两个蓝牙天线130与车辆之间距离的差值。蓝牙信号是2.4ghz,则蓝牙信号的波长在λ=0.125m左右,这种相移可以转换为波前和更远的天线之间的距离。而则停车角度蓝牙模块120可以基于接收的两个蓝牙信号的幅值确定两个距离,最大的距离即为停车角度所对应的斜边,基于斜边以及停车角度即可计算出车辆相对停车带100的停车距离。
48.在当蓝牙天线130发射蓝牙信号时,蓝牙天线130之间的间距d相同,且存储在车辆中。车辆基于接收的相邻的蓝牙信号的相位差即可计算得到车辆的停车角度以及停车距离,车辆停车角度以及停车距离的计算与蓝牙模块120的计算方式相同,在此不再进行赘述。
49.进一步的,蓝牙天线130之间的排列间距小于蓝牙信号的自由空间波长,从而能够避免检测的蓝牙信号的相位不准确,也即能够使得停车带或者车辆能够更加准确的确定车辆的停车距离以及停车角度。
50.参照图4,停车带100设有保护层160。保护层160与安装层110合围构成安装空间,蓝牙模块120、蓝牙天线130、射频模块140以及供电模块150位于安装空间内。各个蓝牙天线130可印刷于安装层110,蓝牙模块120、射频模块140以及供电模块150则设于安装空间内。保护层160用于保护蓝牙模块120、蓝牙天线130、射频模块140以及供电模块150不受到损害。
51.进一步的,保护层160包括粘合层161、第一胶水层162以及保护膜163。粘合层161的一个表面通过第一胶水层162与安装层110合围构成安装空间,且粘合层163的另一个表面设置保护膜163。第一胶水层可以是pei(poly(ethylene imine),聚乙烯亚胺)制成。保护层160通过第一胶水层162能够与安装层110合围构成稳定的不易被破坏的安装空间,且保护层160通过保护膜163的耐腐蚀、防水、防晒等性能最大限度的保护设置于安装空间的各
个部件。
52.此外,停车带100是需要固定在停车区域的。对此,停车带100还设有第二胶水层170,第二胶水层的一个表面粘接未设置部件的安装层110的表面,且第一胶水层170的另一表面粘接地面,从而使得停车带100能够稳固的粘接于地面。
53.在一实施例中,供电模块150可以为太阳能充电模块,停车带100可以通过太阳能进行供电模块150的充能。此外,供电模块150还可以是可充电电池或者不可充电电池,若是供电模块150是可充电电池,则供电模块150设有外接线头进行外部充电。
54.另外,供电模块150可拆卸的设置于安装层110,便于供电模块150的拆卸更换。
55.停车带100可设置一个射频开关140,也即每个蓝牙天线均连接这一个射频开关140,蓝牙模块120通过射频开关140的切换依次连接每个蓝牙天线,从而可以节省停车带100的制作成本,进而减少了车辆精准停车的成本。
56.本公开还提供一种停车方法,应用于停车带,停车方法包括:
57.步骤s10,建立停车带与车辆的蓝牙连接,并接收车辆发送的还车指令。
58.在本实施例中,执行主体为停车带,停车带的各个部件参照上述说明,在此不再进行赘述。
59.参照图5,图5为车辆在停车带所在区域的停车示意图。用户在骑行车辆需要停车时,用户通过用户终端的停车程序向车辆发起停车请求,车辆启通过蓝牙模块连接停车带的蓝牙模块,也即建立停车带与车辆之间的蓝牙连接。车辆通过自身的天线发射蓝牙信号,且车辆通过蓝牙传输方式将还车指令发送至停车带,也即停车带接收车辆发送的还车指令。
60.需要说明的是,在停车带接收到蓝牙连接请求时,停车带根据蓝牙连接请求获取发送蓝牙连接请求设备的mac地址信息。基于mac地址信息,可以确定该设备的设备标识,若是设备标识存储于停车带内,即刻确定改设备是车辆,此时,停车带再建立停车带与车辆的蓝牙连接,避免停车带蓝牙连接非共享车辆,从而避免停车带的电量损耗过大。
61.步骤s20,控制停车带的各个蓝牙天线依次接收车辆发送的蓝牙信号,并获取至少两个蓝牙天线接收的蓝牙信号的幅值以及相位。
62.停车带在接收到车辆发送的还车指令后,控制停车带的各个蓝牙天线依次启动,使得蓝牙天线依次接收车辆发送的蓝牙信号。在每个蓝牙天线接收到蓝牙信号时,停车带会检测蓝牙信号的幅值以及相位。而计算车辆的停车距离以及停车角度需要至少两个蓝牙天线接收的蓝牙信号的幅值以及相位。停车带则获取至少两个蓝牙天线接收蓝牙信号的幅值以及相位。
63.步骤s30,根据至少两个蓝牙天线接收蓝牙信号的幅值以及相位,确定车辆相对停车带的停车距离以及停车角度。
64.停车带基于任意两个蓝牙天线接收的蓝牙信号的幅值以及相位即可确定车辆相对停车带的停车距离以及车辆的停车角度。
65.具体的,停车带获取任意两个蓝牙天线之间的距离d,且任意两个蓝牙天线接收车辆发送的蓝牙信号的相位差为δ为两个蓝牙天线与车辆之间距离的差值。蓝牙信号是2.4ghz,则蓝牙信号的波长在λ=0.125m左右,这种相移可以转换为波前和更远的天线之间
的距离。而则停车角度停车带可以基于接收的两个蓝牙信号的幅值确定两个距离,最大的距离即为停车角度所对应的斜边,基于斜边以及停车角度即可计算出车辆相对停车带的停车距离。
66.步骤s40,根据停车距离以及停车角度确定车辆是否为非法还车。
67.停车带可以通过停车距离以及停车角度确定车辆是否为非法停车。具体的,停车带确定停车距离是否大于预设距离,且确定停车角度与预设停车角度之间的角度差是否大于预设角度差。若是停车距离大于预设距离和/或停车角度与预设停车角度之间的角度差大于预设角度,即可确定车辆是非法停车,停车带可以输出非法停车的提示信息。若在停车距离小于或等于预设距离且角度差小于或等于预设角度差,确定车辆是合法还车,输出合法还车的提示信息。停车带可以向车辆发送提示信息,由车辆将提示信息发送至用户终端。
68.进一步的,在确定车辆非法停车时,停车带还可根据停车距离以及停车角度生成还车指引信息,停车带再输出非法还车的提示信息以及还车指引信息。例如,车辆的停车距离过大,还车指引信息可以是:请将车辆放置于停车区域。又例如,车辆的停车角度与预设停车角度之间的角度差大于预设角度差,还车指引信息可以是:请将车辆垂直于马路停放。
69.在本实施例提供的技术方案中,停车带建立停车带与车辆的蓝牙连接后,接收车辆发送的还车指令,停车带再控制各个蓝牙天线依次接收车辆发送的蓝牙信号,并获取至少两个蓝牙天线接收的蓝牙信号的幅值以及相位,从而根据获取的幅值以及相位差确定车辆相对停车带的停车距离以及停车角度,最后通过停车距离以及停车角度确定车辆是否非法还车。本公开实施例中,车辆发送的信号供停车带的每个蓝牙天线接收,即便是金属遮挡导致影响蓝牙信号,但停车带每个蓝牙天线接收到的蓝牙信号是受到同等的影响,对于车辆最终的停车位置以及停车角度的确定并不会有所影响,提高了车辆的停车精度。
70.本公开还提供停车方法第二实施例,应用于停车带,停车方法包括:
71.步骤s100,建立停车带与车辆的蓝牙连接,并接收车辆发送的还车指令。
72.在本实施例中,执行主体是停车带。停车带的各个部件参照上述说明,在此不再进行赘述。
73.用户在骑行车辆需要停车时,用户通过用户终端的停车程序向车辆发起停车请求,车辆启通过蓝牙模块连接停车带的蓝牙模块,也即建立停车带与车辆之间的蓝牙连接。车辆通过自身的天线发射蓝牙信号,且车辆通过蓝牙传输方式将还车指令发送至停车带,也即停车带接收车辆发送的还车指令。
74.需要说明的是,在停车带接收到蓝牙连接请求时,停车带根据蓝牙连接请求获取发送蓝牙连接请求设备的mac地址信息。基于mac地址信息,可以确定该设备的设备标识,若是设备标识存储于停车带内,即刻确定改设备是车辆,此时,停车带再建立停车带与车辆的蓝牙连接,避免停车带蓝牙连接非共享车辆,从而避免停车带的电量损耗过大。
75.步骤s110,控制停车带的各个蓝牙天线依次发射蓝牙信号。
76.停车带在接收到车辆发送的还车指令后,控制停车带的各个蓝牙天线依次启动,使得蓝牙天线依次发射的蓝牙信号。
77.车辆会定时检测接收的蓝牙信号的幅值以及相位,且定时检测的时间与停车带切换蓝牙天线进行蓝牙信号的发射时间是同步,因而,车辆可以检测到每个蓝牙天线发射的
蓝牙信号的幅值以及相位。计算车辆的停车距离以及停车角度需要至少两个蓝牙天线发射的蓝牙信号的幅值以及相位。车辆则获取至少两个蓝牙天线接收蓝牙信号的幅值以及相位。
78.车辆基于任意两个蓝牙天线接收的蓝牙信号的幅值以及相位即可确定车辆相对停车带的停车距离以及车辆的停车角度。
79.具体的,车辆中存储有相邻两个蓝牙天线之间的排列距离,且各个蓝牙天线的排列距离都是相同的。车辆获取相邻两个蓝牙天线之间的距离d,且相邻的两个蓝牙天线发射的蓝牙信号的相位差为δ为两个蓝牙天线与车辆之间距离的差值。蓝牙信号是2.4ghz,则蓝牙信号的波长在λ=0.125m左右,这种相移可以转换为波前和更远的天线之间的距离。而则停车角度车辆可以基于接收的两个蓝牙信号的幅值确定两个距离,最大的距离即为停车角度所对应的斜边,基于斜边以及停车角度即可计算出车辆相对停车带的停车距离。
80.车辆可以通过停车距离以及停车角度确定车辆是否为非法停车。具体的,车辆确定停车距离是否大于预设距离,且确定停车角度与预设停车角度之间的角度差是否大于预设角度差。若是停车距离大于预设距离和/或停车角度与预设停车角度之间的角度差大于预设角度,即可确定车辆是非法停车,车辆可以输出非法停车的提示信息。若在停车距离小于或等于预设距离且角度差小于或等于预设角度差,确定车辆是合法还车,输出合法还车的提示信息。车辆可以向骑行车辆的用户的用户终端发送提示信息。
81.进一步的,在确定车辆非法停车时,车辆还可根据停车距离以及停车角度生成还车指引信息,车辆再输出非法还车的提示信息以及还车指引信息。例如,车辆的停车距离过大,还车指引信息可以是:请将车辆放置于停车区域。又例如,车辆的停车角度与预设停车角度之间的角度差大于预设角度差,还车指引信息可以是:请将车辆垂直于马路停放。
82.在本实施例提供的技术方案中,停车带在建立与车辆的蓝牙连接后,接收车辆发送的还车指令,再控制停车带的各个蓝牙天线依次发射蓝牙信号,使得车辆基于至少两个蓝牙天线发射的蓝牙信号准确的确定车辆是否是非法停车,提高了车辆的还车精度。
83.本公开还提供停车方法第三实施例,应用于车辆,停车方法包括:
84.步骤s200,在车辆与停车带建立蓝牙连接后,向停车带发送还车指令。
85.在本实施例中,执行主体是车辆。用户在骑行车辆需要停车时,用户通过用户终端的停车程序向车辆发起停车请求。若是车辆在位于停车区域时,车辆会向停车区域的停车带发送蓝牙连接请求。在停车带接收到蓝牙连接请求时,停车带根据蓝牙连接请求获取发送蓝牙连接请求设备的mac地址信息。基于mac地址信息,可以确定该设备的设备标识,若是设备标识存储于停车带内,即刻确定改设备是车辆,此时,停车带再建立停车带与车辆的蓝牙连接,避免停车带蓝牙连接非共享车辆,从而避免停车带的电量损耗过大。
86.在建立停车带与车辆之间的蓝牙连接后,车辆通过蓝牙传输方式将还车指令发送至停车带。
87.步骤s210,定时检测停车带的蓝牙天线发射的蓝牙信号的幅值以及相位,其中,停车带设有多个蓝牙天线,且停车带切换蓝牙天线进行蓝牙信号的发射时间与车辆检测蓝牙信号的幅值的时间同步。
88.步骤s220,根据至少两个蓝牙天线发射蓝牙信号的幅值以及相位,确定车辆相对停车带的停车距离以及停车角度。
89.停车带在接收到车辆发送的还车指令后,控制停车带的各个蓝牙天线依次启动,使得蓝牙天线依次发射的蓝牙信号。
90.车辆会定时检测接收的蓝牙信号的幅值以及相位,且定时检测的时间与停车带切换蓝牙天线进行蓝牙信号的发射时间是同步,因而,车辆可以检测到每个蓝牙天线发射的蓝牙信号的幅值以及相位。计算车辆的停车距离以及停车角度需要至少两个蓝牙天线发射的蓝牙信号的幅值以及相位。车辆则获取至少两个蓝牙天线接收蓝牙信号的幅值以及相位。
91.车辆基于任意两个蓝牙天线接收的蓝牙信号的幅值以及相位即可确定车辆相对停车带的停车距离以及车辆的停车角度。
92.具体的,车辆中存储有相邻两个蓝牙天线之间的排列距离,且各个蓝牙天线的排列距离都是相同的。车辆获取相邻两个蓝牙天线之间的距离d,且相邻的两个蓝牙天线发射的蓝牙信号的相位差为δ为两个蓝牙天线与车辆之间距离的差值。蓝牙信号是2.4ghz,则蓝牙信号的波长在λ=0.125m左右,这种相移可以转换为波前和更远的天线之间的距离。而则停车角度车辆可以基于接收的两个蓝牙信号的幅值确定两个距离,最大的距离即为停车角度所对应的斜边,基于斜边以及停车角度即可计算出车辆相对停车带的停车距离。
93.此外,车辆可以根据任意两个蓝牙信号的幅值以及相位确定车辆相对停车带的停车角度以及停车距离。具体的,车辆可以确定任意两个蓝牙信号之间的间隔时长,间隔时长除以定时间隔时长即可确定发射两个蓝牙信号的蓝牙天线中间隔蓝牙天线的数量。例如,间隔时长除以定时间隔时长为3,即可确定发射两个蓝牙信号的蓝牙天线中间隔的蓝牙天线的数量为2个,也即发射两个蓝牙信号是车辆中存储的排列距离(各个蓝牙天线之间的距离相等)的3倍,3倍排列距离即为发射两个蓝牙信号的蓝牙天线之间的距离。φ可以直接得到,因而车辆可以基于任意两个蓝牙信号的幅值以及相位确定车辆相对停车带的停车距离以及停车角度。
94.步骤s230,根据停车距离以及停车角度确定车辆是否为非法还车。
95.车辆可以通过停车距离以及停车角度确定车辆是否为非法停车。具体的,车辆确定停车距离是否大于预设距离,且确定停车角度与预设停车角度之间的角度差是否大于预设角度差。若是停车距离大于预设距离和/或停车角度与预设停车角度之间的角度差大于预设角度,即可确定车辆是非法停车,车辆可以输出非法停车的提示信息。若在停车距离小于或等于预设距离且角度差小于或等于预设角度差,确定车辆是合法还车,输出合法还车的提示信息。车辆可以向骑行车辆的用户的用户终端发送提示信息。
96.进一步的,在确定车辆非法停车时,车辆还可根据停车距离以及停车角度生成还车指引信息,车辆再输出非法还车的提示信息以及还车指引信息。例如,车辆的停车距离过大,还车指引信息可以是:请将车辆放置于停车区域。又例如,车辆的停车角度与预设停车角度之间的角度差大于预设角度差,还车指引信息可以是:请将车辆垂直于马路停放。
97.在本实施例提供的技术方案中,停车带在建立与车辆的蓝牙连接后,车辆向车辆
发送的还车指令,车辆再定时检测停车带的蓝牙天线发射蓝牙信号的幅值以及相位,从而根据至少两个蓝牙天线发射的蓝牙信号的幅值以及相位,确定车辆相对停车带的停车距离以及停车角度,从而根据停车角度以及停车距离确定车辆是否为非法还车。本公开中,发射信号的各个蓝牙天线设置于停车带,不会有金属遮挡导致实际天线场型受到影响,提高了车辆的停车精度。
98.本领域技术人员在考虑说明书及实践这里公开的实用新型后,将容易想到本公开的其它实施方案。本公开的实施例旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由下面的权利要求书指出。
99.应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求书来限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。