技术特征:
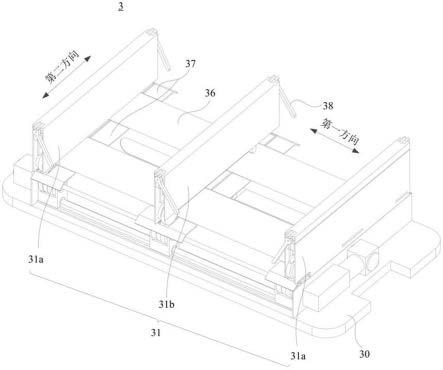
1.一种货叉装置,其特征在于,包括:支撑架、底板和数个货叉,所述底板安装在所述支撑架上;数个所述货叉包括两个固定货叉和至少一个活动货叉,两个所述固定货叉在所述底板上沿第一水平方向间隔设置,至少一个所述活动货叉设置在两个所述固定货叉之间,且所述活动货叉与两个所述固定货叉之间的相对位置可调,以使相邻两个货叉之间形成宽度可变的装货位;各所述货叉包括可伸缩的货叉臂,且各所述货叉均配置有伸缩驱动机构,所述伸缩驱动机构与所述货叉臂连接,以驱动所述货叉臂沿第二水平方向向两侧伸缩移动;其中,所述第一水平方向和所述第二水平方向相互垂直。2.根据权利要求1所述的货叉装置,其特征在于,所述伸缩驱动机构包括动力组件和传动组件,所述传动组件连接在所述货叉臂和所述动力组件之间,以使所述动力组件通过所述传动组件向所述货叉臂提供动力,以驱动所述货叉臂沿所述第二水平方向伸缩移动。3.根据权利要求2所述的货叉装置,其特征在于,所述动力组件包括第一驱动电机、第一传送单元、离合器和第二传送单元,所述第一驱动电机的输出轴与所述第一传送单元连接,所述第一传送单元与所述离合器的一端可选择性连接,所述离合器的另一端与所述第二传送单元连接,所述第二传送单元与所述传动组件连接,当所述第一传送单元与所述离合器连接时,所述第一驱动电机驱动所述第一传送单元运动,所述第一传送单元通过所述离合器带动所述第二传送单元运动,从而使所述第二传送单元带动所述传动组件运动。4.根据权利要求3所述的货叉装置,其特征在于,所述第一传送单元包括花键轴和安装在所述花键轴上的第一螺母,所述花键轴与所述第一驱动电机的输出轴连接,所述第一螺母可选择性的与所述离合器连接,当所述第一螺母与所述离合器连接时,所述第一驱动电机驱动所述花键轴转动,所述花键轴通过所述第一螺母带动所述离合器转动。5.根据权利要求4所述的货叉装置,其特征在于,所述花键轴为滚珠花键轴或者梯形花键轴中的一者。6.根据权利要求3所述的货叉装置,其特征在于,所述第二传送单元包括第一齿轮和与所述第一齿轮啮合的第二齿轮,所述第一齿轮与所述离合器连接,所述第二齿轮与所述传动组件连接。7.根据权利要求2-6中任一项所述货叉装置,其特征在于,所述传动组件包括第一传动轮、第二传动轮和挠性件,所述挠性件绕设在所述第一传动轮和所述第二传动轮上,且所述挠性件被配置为与所述货叉臂连接,并带动所述货叉臂沿所述第二水平方向伸缩移动。8.根据权利要求7所述的货叉装置,其特征在于,所述传动组件还包括齿轮齿条单元,所述齿轮齿条单元包括第三齿轮和第一齿条,所述第三齿轮与所述挠性件连接且可绕自身轴线旋转,所述第一齿条固定于所述货叉臂上且与所述第三齿轮啮合,所述挠性件可带动所述第三齿轮沿所述第二水平方向移动,且所述第三齿轮旋转以驱动所述第一齿条带动所述货叉臂沿第二水平方向伸缩移动。9.根据权利要求8所述的货叉装置,其特征在于,所述齿轮齿条单元还包括齿轮座,所述挠性件上设有开口,所述齿轮座设置在所述开口处并与所挠性件的开口处的两端连接,所述第三齿轮可转动的设置于所述齿轮座;所述齿轮座的一侧设置有与所述第三齿轮啮合的第三齿条,当所述挠性件带动所述齿轮座以及所述第三齿轮沿所述第二水平方向移动
时,所述第三齿条驱动所述第三齿轮绕自身轴线相对所述齿轮座旋转。10.根据权利要求7所述的货叉装置,其特征在于,所述传动组件还包括第一连接件和第二连接件,所述第一连接件和所述第二连接件分别固定于所述货叉臂;所述第一传动轮和所述第二传动轮并列设置,所述挠性件的第一端固定于所述第一连接件,所述挠性件的第二端由所述第一传动轮的一侧绕过所述第二传动轮的背离所述第一传动轮的一侧,再向靠近所述第一传动轮的一侧延伸并固定于所述第二连接件,以使所述挠性件通过所述第一连接件和所述第二连接件带动所述货叉臂沿所述第二水平方向伸缩移动。11.根据权利要求7所述的货叉装置,其特征在于,所述传动组件还包括链齿条,所述链齿条固定于所述货叉臂上并沿所述第二水平方向延伸,所述挠性件与所述链齿条啮合,以使所述挠性件通过所述链齿条驱动所述货叉臂沿所述第二水平方向伸缩移动。12.根据权利要求11所述的货叉装置,其特征在于,所述传动组件还包括压紧件,所述压紧件用于支撑所述挠性件,以使所述挠性件与所述链齿条啮合。13.根据权利要求7所述的货叉装置,其特征在于,所述挠性件为链条,所述第一传动轮为第一链轮,所述第二传动轮为第二链轮;或所述挠性件为同步带,所述第一传动轮为第一同步带轮,所述第二传动轮为第二同步带轮。14.根据权利要求7所述的货叉装置,其特征在于,所述货叉臂包括依次滑动连接的固定板、中板和外板;所述中板上设有至少两个间隔设置的带轮和呈环形套设在所述带轮上的传送带,所述传送带面向所述固定板的一侧与所述固定板连接,所述传送带面向所述外板的一侧与所述外板连接,所述挠性件被配置为与所述中板连接;当所述挠性件带动所述中板沿第二水平方向移动时,所述带轮绕自身轴线旋转以带动所述传送带移动,以使所述传送带带动所述外板相对所述中板沿所述第二水平方向移动。15.根据权利要求1-6中任一项所述的货叉装置,其特征在于,所述活动货叉的底部设置有支架,底板上设置有沿所述第一水平方向延伸的导轨,所述支架上设有与所述导轨相匹配的导向槽,所述导轨位于所述导向槽内且可相对所述导向槽移动。16.根据权利要求15所述的货叉装置,其特征在于,所述货叉装置还包括位置调节组件,所述位置调节组件与所述活动货叉连接,所述位置调节组件用于驱动所述活动货叉在所述底板上沿所述第一水平方向移动。17.根据权利要求16所述的货叉装置,其特征在于,所述位置调节组件包括第二驱动电机、丝杆、第二螺母和电磁制动器,所述丝杆的轴向与所述第一水平方向的方向相同,所述第二驱动电机与丝杆连接,所述第二螺母安装在所述丝杆上且可相对所述丝杆相对转动,所述电磁制动器可选择性的与所述第二螺母连接或分开,当所述电磁制动器与所述第二螺母连接时,所述第二螺母相对所述丝杆沿所述丝杆的轴向移动,以使所述第二螺母推动所述活动货叉沿所述丝杆的轴向移动。18.根据权利要求16所述的货叉装置,其特征在于,所述位置调节组件包括第四齿轮、第二齿条和第二驱动电机,所述第二齿条安装在所述底板上,所述第二驱动电机与所述货叉臂连接,第二驱动电机与所述第四齿轮连接以驱动所述第四齿轮旋转,以使所述第四齿
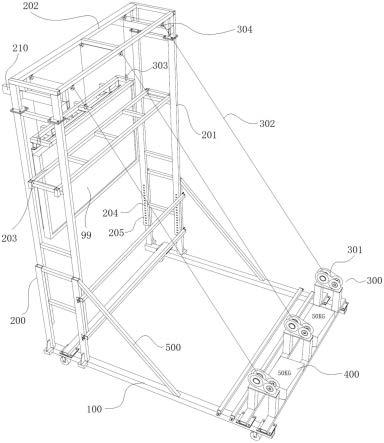
轮带动所述活动货叉相对所述齿条沿所述第一水平方向移动。19.根据权利要求16所述的货叉装置,其特征在于,所述伸缩驱动机构和/或所述位置调节组件与所述底板可拆卸连接。20.根据权利要求14所述的货叉装置,其特征在于,所述底板与各所述货叉之间具有水平设置的第一托盘,各所述货叉的固定板靠近所述底板的一端具有水平设置的第二托盘,所述第二托盘位于所述货叉的正下方且沿第二水平方向向两侧延伸,所述活动货叉上的所述第二托盘可相对所述第一托盘沿第一水平方向移动,所述第一托盘和所述第二托盘用于承载位于货叉装置上的料箱。21.根据权利要求20所述的货叉装置,其特征在于,各所述第二托盘与料箱的接触面高于所述第一托盘与料箱的接触面,以使所述第二托盘与所述底板之间形成避让所述第一托盘的避让空间。22.根据权利要求20所述的货叉装置,其特征在于,各所述第二托盘包括至少两个承载部,至少两个承载部与所述第一托盘在第二水平方向上间隔设置,且各承载部与料箱的接触面和所述第一托盘与料箱的接触面平齐。23.根据权利要求20所述的货叉装置,其特征在于,各所述第二托盘上还设置有避让所述伸缩驱动机构的避让缺口。24.根据权利要求1-6中任一项所述的货叉装置,其特征在于,沿第二水平方向,各所述货叉的两端均具有手指组件,所述手指组件包括第三驱动电机、位置检测器和手指挡片,所述第三驱动电机用于驱动所述手指挡片在竖直收缩状态和水平展开状态之间旋转,所述位置检测器用于检测所述手指挡片的位置状态。25.根据权利要求24所述的货叉装置,其特征在于,所述手指挡片靠近所述第三驱动电机的一端沿周向具有至少两个间隔设置的凹槽,一个所述凹槽对应所述手指挡片的一个预设位置,各所述凹槽均配置有一个位置检测器,各所述位置检测器用于识别所述手指挡片上对应的所述凹槽。26.一种机器人,其特征在于,包括移动底座、立柱和上述权利要求1-25中任一项所述的货叉装置,所述立柱安装在所述移动底座上,所述货叉装置安装在所述立柱上,且可相对所述立柱沿竖直方向升降移动。
技术总结
本申请提供一种货叉装置及机器人,涉及智能仓储技术领域,用于解决货叉装置只适合搬运单一规格的料箱、适用范围小的技术问题,该货叉装置包括支撑架、底板和数个货叉,底板安装在支撑架上;数个货叉包括两个固定货叉和至少一个活动货叉,两个固定货叉在底板上沿第一水平方向间隔设置,至少一个活动货叉设置在两个固定货叉之间,且活动货叉与两个固定货叉之间的相对位置可调,以使相邻两个货叉之间形成宽度可变的装货位;各货叉包括可伸缩的货叉臂,且各货叉均配置有伸缩驱动机构,伸缩驱动机构与货叉臂连接,以驱动货叉臂沿第二水平方向向两侧伸缩移动。本申请机器人包括上述货叉装置。本申请适合搬运多规格料箱,适用范围广。适用范围广。适用范围广。
技术研发人员:詹庆鑫 伍施维
受保护的技术使用者:深圳市海柔创新科技有限公司
技术研发日:2022.05.30
技术公布日:2022/9/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。