1.本发明属于金属屋面健康管理技术领域,特别涉及一种基于决策树算法的金属屋面状态判断方法及系统。
背景技术:
2.金属屋面围护系统是大跨度钢结构建筑的重要组成部分,采用冷成型薄壁合金材料,集保温,吸音,防水,防风等功能于一体,近年来广泛应用于各类场馆、机场航站楼、展览中心、车间仓库等大型公共建筑和工业建筑。大型公共建筑的金属屋面需要兼顾功能性和美观性,金属屋面围护系统以其结构性能优异、外形美观、绿色环保等特点,在公共建筑中得到了迅猛的发展。
3.金属屋面在自然环境下受到各种形式天气载荷的作用,其中较为关键的是风载荷和温度载荷的影响,导致屋面可能发生变形、裂纹、风掀等事故。早期金属屋面的维护普遍采用定期人工巡检的方式,耗费大量人力和时间且了解情况不及时。
4.因此,基于上述因素考虑,如何掌握金属屋面在服役期间的劣化趋势,并在屋面某区域出现故障苗头时预警,以方便管理人员视情维修和及时补救,避免严重事故的发生,成为当下亟待解决的问题。
技术实现要素:
5.本发明的主要目的在于提供一种基于决策树算法的金属屋面状态判断方法及系统,可有效掌握金属屋面在服役期间的劣化趋势,并在屋面某区域出现故障苗头时预警,以方便管理人员视情维修和及时补救,避免严重事故的发生。
6.本发明实施例一方面提供了一种基于决策树算法的金属屋面状态判断方法,包括:
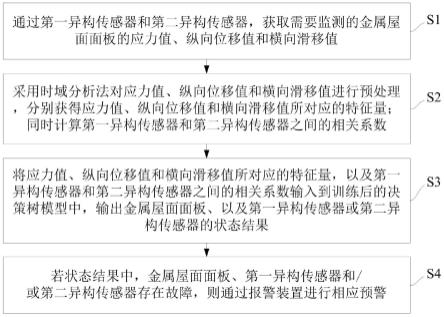
7.s1、通过第一异构传感器和第二异构传感器,获取需要监测的金属屋面面板的应力值、纵向位移值和横向滑移值;
8.s2、采用时域分析法对所述应力值、纵向位移值和横向滑移值进行预处理,分别获得所述应力值、纵向位移值和横向滑移值所对应的特征量;同时计算所述第一异构传感器和第二异构传感器之间的相关系数;
9.s3、将所述应力值、纵向位移值和横向滑移值所对应的特征量,以及所述第一异构传感器和第二异构传感器之间的相关系数输入到训练后的决策树模型中,输出所述金属屋面面板、以及所述第一异构传感器或第二异构传感器的状态结果;
10.其中,所述决策树模型由应力值、纵向位移值和横向滑移值、以及第一异构传感器和第二异构传感器之间的相关系数作为输入,由对应的金属屋面面板、以及所述第一异构传感器或第二异构传感器的状态结果作为输出,进行训练获得。
11.进一步地,还包括:
12.s4、若所述状态结果中,金属屋面面板、第一异构传感器和/或第二异构传感器存
在故障,则通过报警装置进行相应预警。
13.进一步地,所述s1具体包括:
14.s11、将所述金属屋面面板划分为多个采集区域;每个所述采集区域内含有预设数量个采集节点;
15.s12、在每个所述采集节点处均安装有第一异构传感器和第二异构传感器;通过所述第一异构传感器和第二异构传感器,获取每个所述采集节点处对应的金属屋面面板的应力值、纵向位移值和横向滑移值。
16.进一步地,所述第一异构传感器包括应变片和激光传感器,分别用于获取采集节点处对应的金属屋面面板的应力值和纵向位移值;
17.所述第二异构传感器包括超声波传感器,用于获取采集节点处对应的金属屋面面板的横向滑移值。
18.进一步地,所述s2具体包括:
19.将每个所述采集节点所对应的预设数量个采集周期作为一个时间窗;
20.对每个所述时间窗内,每个所述采集节点所对应的应力值、纵向位移值和横向滑移值进行计算,分别获得每个所述时间窗内,每个所述采集节点的应力值、纵向位移值和横向滑移值对应的特征量;
21.同时计算每个所述采集节点所对应的第一异构传感器和第二异构传感器之间的相关系数。
22.进一步地,所述应力值的特征量包括应力最大值、应力标准差和应力均值;
23.所述纵向位移值的特征量包括纵向位移均值;
24.所述横向滑移值的特征量包括横向滑移均值。
25.进一步地,对于每个所述采集节点,对应的所述s3具体包括:
26.s31、将当前所述时间窗内的纵向位移均值、横向滑移均值、应力最大值、应力标准差和应力均值,以及第一异构传感器和第二异构传感器之间的相关系数输入到训练好的决策树模型中;
27.s32、由所述决策树模型对所述纵向位移均值或横向滑移均值的比率进行判断;
28.若所述纵向位移均值或横向滑移均值的比率大于第一阈值,则表明该采集节点处的金属屋面面板存在故障,且该故障存在恢复的可能性;
29.若所述纵向位移均值或横向滑移均值的比率小于所述第一阈值,则进行步骤s33;
30.s33、由所述决策树模型对所述第一异构传感器和第二异构传感器之间的相关系数进行判断;
31.若所述第一异构传感器和第二异构传感器之间的相关系数小于第二阈值,则表明该采集节点处对应的第一异构传感器或第二异构传感器存在故障;
32.若所述第一异构传感器和第二异构传感器之间的相关系数大于第二阈值,则进行步骤s34;
33.s34、由所述决策树模型对所述应力最大值、应力标准差和应力均值进行判断;
34.若所述应力最大值大于第三阈值,或所述应力标准差大于第四阈值,或所述应力均值大于第五阈值,则表明该采集节点处对应的金属屋面面板存在不可恢复性故障;
35.若所述应力最大值小于第三阈值,且所述应力标准差小于第四阈值,且所述应力
均值小于第五阈值,则表明该采集节点处对应的金属屋面面板不存在故障。
36.另一方面,本发明实施例还提供了一种基于决策树算法的金属屋面状态判断系统,应用上述的方法,该系统包括:采集模块、预处理模块和判断模块;
37.所述采集模块,用于通过第一异构传感器和第二异构传感器,获取需要监测的金属屋面面板的应力值、纵向位移值和横向滑移值;
38.所述预处理模块,用于采用时域分析法对所述应力值、纵向位移值和横向滑移值进行预处理,分别获取到所述应力值、纵向位移值和横向滑移值所对应的特征量;同时计算所述第一异构传感器和第二异构传感器之间的相关系数;
39.所述判断模块,用于根据所述应力值、纵向位移值和横向滑移值所对应的特征量,以及所述第一异构传感器和第二异构传感器之间的相关系数,对所述金属屋面面板、以及所述第一异构传感器或第二异构传感器的状态进行判断。
40.进一步地,还包括预警模块;
41.所述预警模块,用于在所述状态结果中,金属屋面面板、第一异构传感器和/或第二异构传感器存在故障时,进行相应预警。
42.与现有技术相比,本发明具有如下有益效果:;通过该方法可有效掌握金属屋面在服役期间的劣化趋势,并在屋面某区域出现故障苗头时预警,以方便管理人员视情维修和及时补救,避免严重事故的发生。
附图说明
43.图1为本发明实施例提供的决策树基本结构示意图。
44.图2为本发明实施例提供的决策树训练流程图。
45.图3为本发明实施例提供的基于决策树算法的金属屋面状态判断方法流程图。
46.图4为本发明实施例提供的决策树判断流程图。
具体实施方式
47.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
48.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
49.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
50.首先对现有相关技术进行简单说明。
51.决策树算法是一种监督学习算法,其目标是找到描述元素的特征向量与决策类别
的映射关系,并且可以利用这种映射关系对未知类别样本进行判别。本专利拟采用决策树算法提取多种特征来进行故障种类判别,实现实时的故障预警判别。
52.通常来应用决策树算法进行分类可以归结为两个步骤:
53.(1)根据已知特征向量和类别的数据集训练决策树,输入为包含特征量和决策类别的数据集d={属性a,属性b,决策},输出为生成的决策树,即一棵根在上叶在下的树型结构,如附图1所示。其中属性a和属性b为特征向量,可以位于树的根节点和分支节点;a1,a2,a3,b1,b2为在训练过程中根生成的条件判据,决策1和决策2为分类类别,位于叶节点。
54.(2)利用生成的决策树对类别未知的特征向量进行预测分类,输入为待分类数据集d={属性a,属性b},根据附图1决策树进行分类,输出为决策类别。
55.决策树算法训练过程如下:
56.(1)数据准备。对原始数据进行预处理,选择特征量,收集包含特征向量与类别的训练集d={特征向量集x,决策类别}作为输入。
57.(2)生成决策树。递归调用决策树生成函数treegenerate(d,x),x为特征向量集,d为训练样本集,包括原始数据集和数据子集。训练完成后返回一颗决策树,详细训练流程见附图2,具体表述如下:
58.创建空节点n;
59.如果d中样本属于同一类别c,则将节点n标记为c类叶节点;
60.如果属性集x为空或d中样本在属性集x上取值相同,则将节点n标记为叶结点,其类别为d中样本数最多的类;
61.否则,从x中选择最优划分属性a,用a标记节点n,对于a的每一个取值生成分支,令dv为a的各取值样本子集;若dv为空,将n的分支标记为叶结点,标记类型为d中样本最多的类;若dv非空,则调用递归函数treegenerate(dv,x);
62.(3)验证分类精度。根据(2)生成的决策树,将测试集d={特征向量集x}作为输入,输出为判别类型。比较决策树的输出判别类型的正确率,验证决策树分类精度。
63.如附图3所示,本发明实施例提供了一种基于决策树算法的金属屋面状态判断方法,包括:
64.s1、通过第一异构传感器和第二异构传感器,获取需要监测的金属屋面面板的应力值、纵向位移值和横向滑移值;
65.s2、采用时域分析法对应力值、纵向位移值和横向滑移值进行预处理,分别获得应力值、纵向位移值和横向滑移值所对应的特征量;同时计算第一异构传感器和第二异构传感器之间的相关系数;
66.s3、将应力值、纵向位移值和横向滑移值所对应的特征量,以及第一异构传感器和第二异构传感器之间的相关系数输入到训练后的决策树模型中,输出金属屋面面板、以及第一异构传感器或第二异构传感器的状态结果;
67.其中,决策树模型由应力值、纵向位移值和横向滑移值、以及第一异构传感器和第二异构传感器之间的相关系数作为输入,由对应的金属屋面面板、以及第一异构传感器或第二异构传感器的状态结果作为输出,进行训练获得;
68.s4、若状态结果中,金属屋面面板、第一异构传感器和/或第二异构传感器存在故障,则通过报警装置进行相应预警。
69.接下来,分别对上述步骤进行具体说明。
70.在上述步骤s1中,对于金属屋面健康管理最基础的工作就是根据实时采集到的传感器数据,判别屋面当前状态。由于采集到的结构监测信号容易受到噪声、电磁、网络传输、传感器故障等因素的影响,仅根据单一传感器进行阈值判断容易造成误判,因此需要通过对同一位置的异构传感器信号进行融合,以排除外界因素对判别的干扰;
71.在本发明实施例中,首先,将金属屋面面板划分为多个采集区域;每个采集区域内含有预设数量个采集节点;其次,在每个采集节点处均安装有第一异构传感器和第二异构传感器;通过第一异构传感器和第二异构传感器,获取每个采集节点处对应的金属屋面面板的应力值、纵向位移值和横向滑移值;
72.其中,第一异构传感器包括应变片和激光传感器,分别用于获取采集节点处对应的金属屋面面板的应力值和纵向位移值;第二异构传感器包括超声波传感器,用于获取采集节点处对应的金属屋面面板的横向滑移值。
73.在上述步骤s2中,金属屋面的状态变化是一个随时间变化的过程,由于金属面板受风力影响会产生弹性形变,仅一个时刻的数据超阈值并不能判断屋面是否已经损伤,因此不能仅通过单一时刻的数据判断是否报警,需要关注的是在一段时间内金属屋面状态超阈值的频率;另外,金属屋面状态的改变是一个大面积的状态改变,金属屋面同一区域相邻节点之间会有数据关联,当某一区域的面板状态异常,异常数据会在这个区域内一个到多个节点之中体现。因此,对于金属屋面的数据分析和特征提取需要从时间和空间两个维度考虑,提取数据的统计特征量。
74.在金属屋面监测系统中,特征量的选择十分关键,会严重影响决策算法的复杂度和准确性。特征选择的目的是根据采集的传感器数据选择最能体现屋面状态的特征向量。本发明拟采用时域分析法进行特征量提取,时域分析即对传感器采集到时域信号进行统计分析,通常可以提取时域信号的均值、方差、标准差和相关系数等。
75.在本发明实施例中,首先,将每个采集节点所对应的预设数量个采集周期作为一个时间窗;其次,对每个时间窗内,每个采集节点所对应的应力值、纵向位移值和横向滑移值进行计算,分别获得每个时间窗内,每个采集节点的应力值、纵向位移值和横向滑移值对应的特征量;同时计算每个采集节点所对应的第一异构传感器和第二异构传感器之间的相关系数;其中,应力值的特征量包括应力最大值、应力标准差和应力均值;纵向位移值的特征量包括纵向位移均值;横向滑移值的特征量包括横向滑移均值。
76.在实际监测中,可以以5个采集节点为一个整体组成一个区域,针对每一个区域进行报警机制设置;当天气恶劣或某点数据异常时,进入实时监控模式;可以以5s为一个数据采集周期,同时将数据时间序列以1min为一个时间窗划分,通过对1min内的特征量统计分析判断这一节点状态。对于区域统计量,统计一个区域内均值达到阈值的节点比率。对于单点统计量,一个时间窗内的应力均值反映中心变化趋势;应力标准差反映屋面的振动幅度;应力最大值反映在一个时间窗口内屋面板变形的剧烈程度;其中,应力标准差的计算公式表示为:
[0077][0078]
该公式中,a(str)表示应力标准差;n表示应变片测得的数据总数;xi表示第一异构传感器在第i时刻测得的应力值;x(str)表示一个时间窗口内的应力均值;
[0079]
第一异构传感器和第二异构传感器在同一时刻的相关系数可以反映两种传感器的变化趋势的相关性,并以此来判别传感器故障;其中,第一异构传感器和第二异构传感器之间的相关系数的计算公式表示为:
[0080][0081]
该公式中,x表示第一异构传感器的测量值;y表示第二异构传感器的测量值;ρ
xy
表示第一异构传感器和第二异构传感器之间的相关系数;d(x)表示x的方差;d(y)表示y的方差;cov(x,y)表示x和y的协方差;x(str)表示一个时间窗口内的应力均值;y(dis)表示一个时间窗口内的纵向位移均值;xi表示第一异构传感器在第i时刻测得的应力值;yi表示第一异构传感器在第i时刻测得的纵向位移值。
[0082]
在上述步骤s3中,整体报警思路即找到同一位置的第一异构传感器和第二异构传感器数据之间关联,进行故障判别;将同一时刻各个位置的传感器数据进行横向比较可以剔除异常点,减少误判。金属屋面预警策略需要判别屋面正常、屋面故障预警、传感器故障三种情况;其中,屋面正常表现为屋面的失效是一个区域整体变化的过程;当天气恶劣时,同一区域的所有节点数据都会有明显的变化,此时某节点的数据异常才需要报警在天气状态良好时,仅一个节点数据异常则不需要报警;屋面故障预警表现为以区域为单位进行报警,主要的报警形式包括屋面鼓起、屋面塑性变形、屋面板横向滑移等情况;传感器故障通过同一位置的异构传感器数据关联情况进行判别。
[0083]
决策树模型建立以及根据所建模型进行判别的过程为根据上述屋面正常,屋面故障预警,传感器故障三类情况进行实验,有针对性地采集各种类别对应的样本数据,并提取特征量,得到样本集;将样本集分为训练集和测试集,根据训练集样本训练决策树模型;最后验证决策树模型效果,将测试集特征量输入,通过所训练决策树模型得到判别结果,将判别结果与实际类别作比较,计算判别准确率。
[0084]
在本发明实施例中,决策树模型由应力值、纵向位移值和横向滑移值、以及第一异构传感器和第二异构传感器之间的相关系数作为输入,由对应的金属屋面面板、以及第一异构传感器或第二异构传感器的状态结果作为输出,进行训练获得。其中金属屋面面板的状态结果包括面板正常和面板故障;其中面板故障包括面板变形、裂纹和风掀中的一种或多种;
[0085]
在本发明实施例中,参照附图4所示,对于每个采集节点来讲,通过训练后的决策树模型进行判断的过程具体包括:
[0086]
s31、将当前时间窗内的纵向位移均值、横向滑移均值、应力最大值、应力标准差和应力均值,以及第一异构传感器和第二异构传感器之间的相关系数输入到训练好的决策树模型中;
[0087]
s32、由决策树模型对纵向位移均值或横向滑移均值的比率进行判断;首先设定一个预设值,若在一个时间窗内,将纵向位移均值或横向滑移均值数据中,超过该预设值的数据,与纵向位移均值或横向滑移均值的总数据的比值作为比率,将该比率与第一阈值进行比对;
[0088]
若纵向位移均值或横向滑移均值的比率大于第一阈值,则表明该采集节点处的金属屋面面板存在故障,且该故障存在恢复的可能性;若纵向位移均值或横向滑移均值的比率小于第一阈值,则进行步骤s33;在本发明实施例中,将第一阈值取为40%;
[0089]
s33、由决策树模型对第一异构传感器和第二异构传感器之间的相关系数进行判断;若第一异构传感器和第二异构传感器之间的相关系数小于第二阈值,则表明该采集节点处对应的第一异构传感器或第二异构传感器存在故障;若第一异构传感器和第二异构传感器之间的相关系数大于第二阈值,则进行步骤s34;在本发明实施例中,将第二阈值取为-0.5;
[0090]
s34、由决策树模型对应力最大值、应力标准差和应力均值进行判断;若应力最大值大于第三阈值,或应力标准差大于第四阈值,或应力均值大于第五阈值,则表明该采集节点处对应的金属屋面面板存在不可恢复性故障;若应力最大值小于第三阈值,且应力标准差小于第四阈值,且应力均值小于第五阈值,则表明该采集节点处对应的金属屋面面板不存在故障;在本发明实施例中,将第三阈值取为111;将第四阈值取为0.3;将第五阈值取为50。
[0091]
本发明实施例还提供了一种基于决策树算法的金属屋面状态判断系统,应用上述的方法,该系统包括:采集模块、预处理模块、判断模块和预警模块;
[0092]
其中,采集模块,用于通过第一异构传感器和第二异构传感器,获取需要监测的金属屋面面板的应力值、纵向位移值和横向滑移值;预处理模块,用于采用时域分析法对应力值、纵向位移值和横向滑移值进行预处理,分别获取到应力值、纵向位移值和横向滑移值所对应的特征量;同时计算第一异构传感器和第二异构传感器之间的相关系数;判断模块,用于根据应力值、纵向位移值和横向滑移值所对应的特征量,以及第一异构传感器和第二异构传感器之间的相关系数,对金属屋面面板、以及第一异构传感器或第二异构传感器的状态进行判断;预警模块,用于在状态结果中,金属屋面面板、第一异构传感器和/或第二异构传感器存在故障时,进行相应预警。
[0093]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。