1.本发明涉及目标检测技术领域,更具体地,涉及一种基于神经网络架构搜索的工业产品盲检目标检测方法。
背景技术:
2.工业产品铭牌信息的泄露会影响其产品质检的公平性。因此需要将铭牌上的敏感信息进行遮挡后再进行检测,即盲检。一般可采用基于机器视觉的方法对产品外包装进行自动拆除和铭牌遮盖以避免人工的参与引起的信息泄露(如图1所示)。基于深度学习的目标检测方法是实现自动盲检的关键技术之一。
3.目前大多数基于深度学习的目标检测方法的主干网络使用的是手工设计的神经网络,如yolov4使用cspdarknet-53网络作为主干网络,faster rcnn使用vgg16和resnet101作为主干网络,sparse r-cnn使用resnet50和resnet101作为主干网络。以上方法虽然都达到了较高的精度,但手工设计的神经网络依耐于人工经验,且适应性较差。
4.神经网络架构搜索(neural architecture search,nas)可以针对数据集自动构建cnn架构。nas主要包括定义搜索空间、设计搜索策略和性能评估策略。搜索空间定义了可以搜索到的网络结构,主要包括基于已有的神经网络构建搜索空间并搜索整个神经网络和基于cell构建搜索空间并搜索最佳cell;搜索策略定义了如何在搜索空间寻找最佳神经网络结构,如基于强化学习和梯度更新方法来搜索最优架构;性能评估策略在神经网络结构搜索中用来估计采样到的神经网络结构的泛化性能。目前基于nas的目标检测方法的性能已经超过了一些手工设计的神经网络。
5.现有技术中公开了一种基于神经网络架构搜索的表面缺陷分类方法的专利,该专利首先构建堆叠候选cell的网络架构nas-sdc,所述网络架构nas-sdc基于神经网络架构搜索构建;然后通过neu-cls缺陷数据集搜索cell,利用搜索到的最佳cell构建缺陷分类cnn;最后利用得到的缺陷分类cnn对表面缺陷进行分类;该专利通过神经网络架构搜索,可自动从更加精简的搜索空间中高效的搜索出最佳的网络单元,基于该最佳网络单元的cnn具有参数量小、检测精度高等优点,成功的应用于表面缺陷分类。然而,该专利对于怎样实现促进构建目标检测神经网络的自动化程度和提高目标检测的精度却没有任何涉及。
技术实现要素:
6.本发明提供一种基于神经网络架构搜索的工业产品盲检目标检测方法,该方法可实现促进构建目标检测神经网络的自动化程度和提高目标检测的精度。
7.为了达到上述技术效果,本发明的技术方案如下:
8.一种基于神经网络架构搜索的工业产品盲检目标检测方法,包括以下步骤:
9.s1:设计一个xor通道融合模块,在多分支接入时融合多条分支的特征映射;
10.s2:通过步骤s1设计的xor通道融合模块构建被搜索的神经网络架构单元cell,采用了逐渐剪枝的搜索策略来搜索多分支cnn架构;
11.s3:将步骤s2搜索出的多分支cnn架构作为yolov4的主干网络在数据集上评估测试。
12.进一步地,所述步骤s1中,xor通道融合模块的操作机制是:
13.设有k 1个分支分别为接入,其中表示第n-mk层的特征映射,k∈{0,1,2,
…
},m0<m1<
…
<mk,的通道数为且
14.为了融合k 1个分支,一个xor模块需要设置k个xor子块,除第一个xor子块接受最深层的2路分支外,其余子块分别接受次深层的一路分支和前一个子块的一路输出,各分支按照层次倒序依次输入到子块中。
15.进一步地,和输入到第1个子块,每个子块包含2路输出,其中一路输出为增强的浅层特征映射负责串联其他子块,即作为下一个子块的深层特征映射输入;另外一路为增强的深层特征映射经xor融合后输出。
16.进一步地,所述步骤s1中,xor通道融合模块融合多条分支的特征映射的过程如下:
17.s11:初始化i=1;两路输入对应的通道数分别为c1,c2;
18.s12:将f
in,1
和f
in,2
输入到第i个xor子块中,由于每个通道对应的bn层参数反应了通道的重要程度,将f
in,1
所有通道按照bn参数大小降序排列,选出前c2个通道,并进行双线性上采样得到f
up
;然后,将f
up
与f
in,2
进行xor操作,xor操作定义如下:
19.将和f
up
按通道进行取最大值的点运算,输出结果为
[0020][0021]
其中,fi为第i个通道;
[0022]
然后,计算差异张量
[0023][0024]
接着,以f
sub
中每个通道的均值作为对应通道的阈值ti,并采用xor的方式融合和f
up
,如公式(3)所示:
[0025][0026]
s13:将f
xor
下采样,并与剩余的c
1-c2个通道拼接,得到增强后的一路输出
[0027]
s14:将f
up
与进行点乘运算,将深层特征信息嵌入浅层特征,得到增强后的另外一路输出
[0028]
s15:如果i<k,表示还有分支未接入,则:i
←
i 1,i 1,对应的通道数分别为c1,c2,转到s12,否则,结束。
[0029]
进一步地,当特征差异低于ti时,对应位置的深层、浅层特征语义近似,因此选择语义信息更丰富的深层特征当高于ti时,说明特征语义差异较大,而浅层特征包含更精细位置的特征信息,因此选择浅层特征操作将更准确的空间信息融入到深层特征中,预期实现更高的检测准确性命名为xor操作。
[0030]
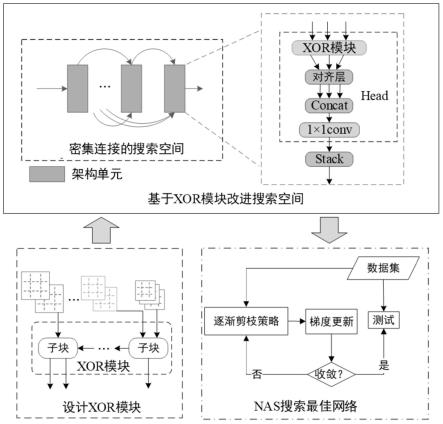
进一步地,所述步骤s2中,xor通道融合模块构建被搜索的神经网络架构单元cell包括一个头层head和一个堆叠层stack;在头层中,当输入为多分支时,首先通过xor模块进行融合,然后由对齐层将不同尺寸包括通道数和空间分辨率的张量转换为相同尺寸的张量,其中对齐层由多条并行分支构成,每条分支都是一组除skip connect以外的候选操作集合,再进行拼接操作,并连接一个1
×
1conv层规范化头层输出;当输入为单分支时,则进行对齐操作后直接输出;在堆叠层中,每一层为一组候选操作集合,包括basicblock和skip connect,basic block为resnet18中的残差块,skip connect用于搜索堆叠层深度;如果选择了skip connect,将在最终的网络架构中删除相应的层。
[0031]
进一步地,所述步骤s2中,采用堆叠神经网络架构单元cell的方式搭建完整的神经网络,按照空间分辨率的不同将整个神经网络分为多个子网,每个子网包含若干个通道数不同和空间分辨率相同的cell,但放松了连接的搜索限制:设子网ni内的cell的空间分辨率为hi×
wi(hi=wi),子网nj(j>i)内的cell的空间分辨率为hj×
wj(hj=wj),则cell之间存在连接的条件为hi/hj≤2。
[0032]
进一步地,所述步骤s2中,采用了逐渐剪枝的搜索策略来搜索多分支cnn架构的过程是:
[0033]
通过剪枝每个cell往后连接路径中的候选操作来切断cell之间的连接,并利用连接路径中的候选操作权重表示连接系数:
[0034]
首先,为搜索空间内所有候选操作分配一个α架构参数,每一组候选操作权重通过softmax函数进行归一化;然后,对每个cell往后连接路径中的所有候选操作权重进行最大值归一化;接着,引入一组可训练参数其中m为搜索空间内cell个数,每个cell阈值定义为利用定义的阈值,通过relu操作将连接路径中低于阈值的候选操作权重置零;最后,对连接路径中的候选操作权重进行归一化,路径连接系数β为该路径中候选操作权重的和,其中β∈{0,1}为一个二进制变量,表示是否存在连接;
[0035]
在搜索过程中,基于梯度更新α架构参数和t参数,阈值逐渐增大,实现逐渐剪枝,每一个cell会保持至少一个往后的连接并可搜索到多分支结构。
[0036]
进一步地,所述步骤s4中,搜索结束后提取搜索空间内连接系数不为零的路径和未选择skip connect的堆叠层,形成最终的神经网络,将最终的神经网络作为yolov4的主干网络,在数据集上重新训练并测试。
[0037]
与现有技术相比,本发明技术方案的有益效果是:
[0038]
本发明设计了一个xor通道融合模块,用于解决多分支接入带来的特征混淆和冗余问题。利用深浅层特征映射之间的互补性,在多分支接入时,通过xor通道融合模块在通道层面上对不同尺度的特征映射进行xor融合;提出了一种逐渐剪枝的搜索策略,在搜索过程中不断剪枝,高效的构建多分支cnn架构同时缩小搜索和评估之间的差距,生成的多分支cnn结构,可以在深层特征中融入浅层特征,提高小目标检测能力;将搜索出的模型作为
yolov4的主干网络,达到了更高的检测精度。在六分类共3420张样本的测试集上map为99.1%,高于cspdartknet53。检测器的参数量为54.36m,比基于cspdartknet53低了约15%。
附图说明
[0039]
图1为现有技术中基于目标检测方法的工业产品盲检过程图;
[0040]
图2为本发明方法流程示意图;
[0041]
图3为xor通道融合模块结构示意图;
[0042]
图4为神经网络架构单元cell结构示意图;
[0043]
图5为路径连接系数计算过程示意图;
[0044]
图6为样本类别标记示意图;
[0045]
图7为搜索到的多分支cnn结构示意图。
具体实施方式
[0046]
附图仅用于示例性说明,不能理解为对本专利的限制;
[0047]
为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
[0048]
对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0049]
下面结合附图和实施例对本发明的技术方案做进一步的说明。
[0050]
实施例1
[0051]
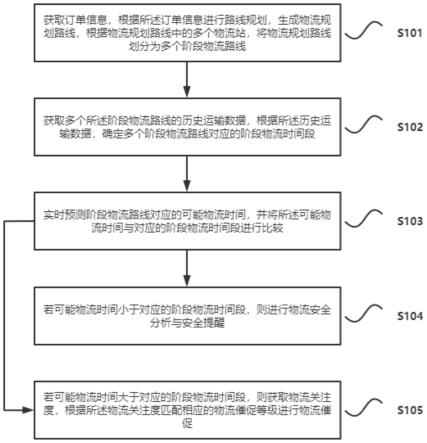
如图2所示,一种基于神经网络架构搜索的工业产品盲检目标检测方法,包括以下步骤:
[0052]
s1:设计一个xor通道融合模块,在多分支接入时融合多条分支的特征映射;
[0053]
s2:通过步骤s1设计的xor通道融合模块构建被搜索的神经网络架构单元cell,采用了逐渐剪枝的搜索策略来搜索多分支cnn架构;
[0054]
s3:将步骤s2搜索出的多分支cnn架构作为yolov4的主干网络在数据集上评估测试。
[0055]
本方法设计了一个xor通道融合模块,用于解决多分支接入带来的特征混淆和冗余问题。利用深浅层特征映射之间的互补性,在多分支接入时,通过xor通道融合模块在通道层面上对不同尺度的特征映射进行xor融合;提出了一种逐渐剪枝的搜索策略,在搜索过程中不断剪枝,高效的构建多分支cnn架构同时缩小搜索和评估之间的差距,生成的多分支cnn结构,可以在深层特征中融入浅层特征,提高小目标检测能力;将搜索出的模型作为yolov4的主干网络,达到了更高的检测精度。在六分类共3420张样本的测试集上map为99.1%,高于cspdartknet53。检测器的参数量为54.36m,比基于cspdartknet53低了约15%。
[0056]
实施例2
[0057]
如图2所示,一种基于神经网络架构搜索的工业产品盲检目标检测方法,包括以下步骤:
[0058]
s1:设计一个xor通道融合模块,在多分支接入时融合多条分支的特征映射;
[0059]
s2:通过步骤s1设计的xor通道融合模块构建被搜索的神经网络架构单元cell,采用了逐渐剪枝的搜索策略来搜索多分支cnn架构;
[0060]
s3:将步骤s2搜索出的多分支cnn架构作为yolov4的主干网络在数据集上评估测试。
[0061]
如图3所示,步骤s1中xor通道融合模块的操作机制是:
[0062]
设有k 1个分支分别为接入,其中表示第层的特征映射,k∈{0,1,2,
…
},m0<m1<
…
<mk,的通道数为且
[0063]
为了融合k 1个分支,一个xor模块需要设置k个xor子块,除第一个xor子块接受最深层的2路分支外,其余子块分别接受次深层的一路分支和前一个子块的一路输出,各分支按照层次倒序依次输入到子块中,例如和输入到第1个子块,每个子块包含2路输出,其中一路输出为增强的浅层特征映射负责串联其他子块,即作为下一个子块的深层特征映射输入;另外一路为增强的深层特征映射经xor融合后输出。xor通道融合模块融合多条分支的特征映射的过程如下:
[0064]
s11:初始化i=1;两路输入对应的通道数分别为c1,c2;
[0065]
s12:将f
in,1
和f
in,2
输入到第i个xor子块中,由于每个通道对应的bn层参数反应了通道的重要程度,将f
in,1
所有通道按照bn参数大小降序排列,选出前c2个通道,并进行双线性上采样得到f
up
;然后,将f
up
与f
in,2
进行xor操作,xor操作定义如下:
[0066]
将和f
up
按通道进行取最大值的点运算,输出结果为
[0067][0068]
其中,fi为第i个通道;
[0069]
然后,计算差异张量
[0070][0071]
接着,以f
sub
中每个通道的均值作为对应通道的阈值ti,并采用xor的方式融合和f
up
,如公式(3)所示:
[0072][0073]
该融合算法类似于xor算子:当特征差异低于ti时,对应位置的深层、浅层特征语义近似,因此选择语义信息更丰富的深层特征当高于ti时,说明特征语义差异较大,而浅层特征包含更精细位置的特征信息,因此选择浅层特征操作将更准确的空间信息融入到深层特征中,预期实现更高的检测准确性命名为xor操作。
[0074]
s13:将f
xor
下采样,并与剩余的c
1-c2个通道拼接,得到增强后的一路输出
[0075]
s14:将f
up
与进行点乘运算,将深层特征信息嵌入浅层特征,得到增强后的另外一路输出
[0076]
s15:如果i<k,表示还有分支未接入,则:i
←
i 1,i 1,对应的通道数分别为c1,c2,转到s12,否则,结束。
[0077]
如图4所示,步骤s2中,xor通道融合模块构建被搜索的神经网络架构单元cell包括一个头层head和一个堆叠层stack;在头层中,当输入为多分支时,首先通过xor模块进行融合,然后由对齐层将不同尺寸包括通道数和空间分辨率的张量转换为相同尺寸的张量,其中对齐层由多条并行分支构成,每条分支都是一组除skip connect以外的候选操作集合,再进行拼接操作,并连接一个1
×
1 conv层规范化头层输出;当输入为单分支时,则进行对齐操作后直接输出;在堆叠层中,每一层为一组候选操作集合,包括basicblock和skip connect,basic block为resnet18中的残差块,skip connect用于搜索堆叠层深度;如果选择了skip connect,将在最终的网络架构中删除相应的层;
[0078]
采用堆叠神经网络架构单元cell的方式搭建完整的神经网络,按照空间分辨率的不同将整个神经网络分为多个子网,每个子网包含若干个通道数不同和空间分辨率相同的cell(如表1所示),但放松了连接的搜索限制:设子网ni内的cell的空间分辨率为hi×
wi(hi=wi),子网nj(j>i)内的cell的空间分辨率为hj×
wj(hj=wj),则cell之间存在连接的条件为hi/hj≤2。
[0079]
表1 不同子网的通道数、空间分辨率和cell堆叠个数
[0080]
子网1234567尺寸2081045226261313堆叠个数1334341通道数3248,56,6472,96,112128,144,160,176192,208,224240,256,272,288512
[0081]
如图5所示,采用了逐渐剪枝的搜索策略来搜索多分支cnn架构的过程是:
[0082]
通过剪枝每个cell往后连接路径中的候选操作来切断cell之间的连接,并利用连接路径中的候选操作权重表示连接系数:
[0083]
首先,为搜索空间内所有候选操作分配一个α架构参数,每一组候选操作权重通过softmax函数进行归一化;然后,对每个cell往后连接路径中的所有候选操作权重进行最大值归一化;接着,引入一组可训练参数其中m为搜索空间内cell个数,每个cell阈值定义为利用定义的阈值,通过relu操作将连接路径中低于阈值的候选操作权重置零;最后,对连接路径中的候选操作权重进行归一化,路径连接系数β为该路径中候选操作权重的和,其中β∈{0,1}为一个二进制变量,表示是否存在连接;
[0084]
在搜索过程中,基于梯度更新α架构参数和t参数,阈值逐渐增大,实现逐渐剪枝,每一个cell会保持至少一个往后的连接并可搜索到多分支结构。
[0085]
步骤s4中,搜索结束后提取搜索空间内连接系数不为零的路径和未选择skip connect的堆叠层,形成最终的神经网络,将最终的神经网络作为yolov4的主干网络,在数据集上重新训练并测试。
[0086]
实施例3
[0087]
如图2所示,一种基于神经网络架构搜索的工业产品盲检目标检测方法,包括以下步骤:
[0088]
s1:设计一个xor通道融合模块,在多分支接入时融合多条分支的特征映射;
[0089]
s2:通过步骤s1设计的xor通道融合模块构建被搜索的神经网络架构单元cell,采用了逐渐剪枝的搜索策略来搜索多分支cnn架构;
[0090]
s3:将步骤s2搜索出的多分支cnn架构作为yolov4的主干网络在数据集上评估测试。
[0091]
步骤s1中xor通道融合模块的操作机制是:
[0092]
设有k 1个分支分别为接入,其中表示第n-mk层的特征映射,k∈{0,1,2,
…
},m0<m1<
…
<mk,的通道数为且
[0093]
为了融合k 1个分支,一个xor模块需要设置k个xor子块,除第一个xor子块接受最深层的2路分支外,其余子块分别接受次深层的一路分支和前一个子块的一路输出,各分支按照层次倒序依次输入到子块中,例如和输入到第1个子块,每个子块包含2路输出,其中一路输出为增强的浅层特征映射负责串联其他子块,即作为下一个子块的深层特征映射输入;另外一路为增强的深层特征映射经xor融合后输出。xor通道融合模块融合多条分支的特征映射的过程如下:
[0094]
s11:初始化i=1;两路输入对应的通道数分别为c1,c2;
[0095]
s12:将f
in,1
和f
in,2
输入到第i个xor子块中,由于每个通道对应的bn层参数反应了通道的重要程度,将f
in,1
所有通道按照bn参数大小降序排列,选出前c2个通道,并进行双线性上采样得到f
up
;然后,将f
up
与f
in,2
进行xor操作,xor操作定义如下:
[0096]
将和f
up
按通道进行取最大值的点运算,输出结果为
[0097][0098]
其中,fi为第i个通道;
[0099]
然后,计算差异张量
[0100][0101]
接着,以f
sub
中每个通道的均值作为对应通道的阈值ti,并采用xor的方式融合和f
up
,如公式(3)所示:
[0102][0103]
该融合算法类似于xor算子:当特征差异低于ti时,对应位置的深层、浅层特征语义近似,因此选择语义信息更丰富的深层特征当高于ti时,说明特征语义差异较大,而浅层特征包含更精细位置的特征信息,因此选择浅层特征
操作将更准确的空间信息融入到深层特征中,预期实现更高的检测准确性命名为xor操作。
[0104]
s13:将f
xor
下采样,并与剩余的c
1-c2个通道拼接,得到增强后的一路输出
[0105]
s14:将f
up
与进行点乘运算,将深层特征信息嵌入浅层特征,得到增强后的另外一路输出
[0106]
s15:如果i<k,表示还有分支未接入,则:i
←
i 1,i 1,对应的通道数分别为c1,c2,转到s12,否则,结束。
[0107]
步骤s2中,xor通道融合模块构建被搜索的神经网络架构单元cell包括一个头层head和一个堆叠层stack;在头层中,当输入为多分支时,首先通过xor模块进行融合,然后由对齐层将不同尺寸包括通道数和空间分辨率的张量转换为相同尺寸的张量,其中对齐层由多条并行分支构成,每条分支都是一组除skip connect以外的候选操作集合,再进行拼接操作,并连接一个1
×
1 conv层规范化头层输出;当输入为单分支时,则进行对齐操作后直接输出;在堆叠层中,每一层为一组候选操作集合,包括basicblock和skip connect,basic block为resnet18中的残差块,skip connect用于搜索堆叠层深度;如果选择了skip connect,将在最终的网络架构中删除相应的层;采用堆叠神经网络架构单元cell的方式搭建完整的神经网络,按照空间分辨率的不同将整个神经网络分为多个子网,每个子网包含若干个通道数不同和空间分辨率相同的cell(如表1所示),但放松了连接的搜索限制:设子网ni内的cell的空间分辨率为hi×
wi(hi=wi),子网nj(j>i)内的cell的空间分辨率为hj×
wj(hj=wj),则cell之间存在连接的条件为hi/hj≤2。
[0108]
采用了逐渐剪枝的搜索策略来搜索多分支cnn架构的过程是:
[0109]
通过剪枝每个cell往后连接路径中的候选操作来切断cell之间的连接,并利用连接路径中的候选操作权重表示连接系数:
[0110]
首先,为搜索空间内所有候选操作分配一个α架构参数,每一组候选操作权重通过softmax函数进行归一化;然后,对每个cell往后连接路径中的所有候选操作权重进行最大值归一化;接着,引入一组可训练参数其中m为搜索空间内cell个数,每个cell阈值定义为利用定义的阈值,通过relu操作将连接路径中低于阈值的候选操作权重置零;最后,对连接路径中的候选操作权重进行归一化,路径连接系数β为该路径中候选操作权重的和,其中β∈{0,1}为一个二进制变量,表示是否存在连接;
[0111]
在搜索过程中,基于梯度更新α架构参数和t参数,阈值逐渐增大,实现逐渐剪枝,每一个cell会保持至少一个往后的连接并可搜索到多分支结构。
[0112]
步骤s4中,搜索结束后提取搜索空间内连接系数不为零的路径和未选择skip connect的堆叠层,形成最终的神经网络,将最终的神经网络作为yolov4的主干网络,在数据集上重新训练并测试。
[0113]
具体实验:
[0114]
配置了inteli7处理器、ddr4 16g内存和一台nvidia 3090 gpu的电脑上进行,采用pytorch深度学习框架。实验采用主干网络 yolov4的方法构建目标检测cnn。主干网络采用被搜索到的神经网络或者是其他手工设计的cnn。首先进行xor通道融合模块的消融实
验,将不采用xor通道融合模块的方法(命名为nas-noxor)和采用xor通道融合模块的方法(命名为nas-xor)进行性能比较。然后,将nas-xor与densenas和darts在搜索性能和精度上进行比较;最后与cspdarknet53、resnet18和resnet50等手工cnn在精度和参数量上进行比较。
[0115]
数据集
[0116]
数据集包括六个类:锁钉(b)、锁钉卡点(b-p)、包装横梁(t-p)、铭牌(p)、铭牌底部(p-b)、铭牌顶部(p-t),其中锁钉、锁钉卡点、包装横梁三个类是拆除产品外包装的检测目标,铭牌、铭牌底部、铭牌顶部三个类是铭牌遮盖的检测目标(如图6所示)。
[0117]
使用labeling工具进行样本类别标记(锁钉、铭牌、包装横梁、铭牌底部、铭牌顶部和锁钉卡点六个类对应的编码分别为0、1、2、3、4和5)。然后,对数据集中所有图片进行数据增强来增加训练样本和增强可靠性,主要采用旋转、水平镜像和亮度增强的数据增强方法。为了确保增强后的样本数量基本平衡,根据每个类别的样本数量选择不同的旋转角度和不同的亮度增强。最后按7:1:2比例划分为训练集、验证集和测试集(如表2所示)。
[0118]
表2 增强后各类别样本数量
[0119]
编号名称训练集验证集测试集0锁钉24603007201铭牌23103364502包装横梁21602406003铭牌底部18902524804铭牌顶部18902524805锁钉卡点2430270690 总数1314016503420
[0120]
评估指标
[0121]
采用平均精度(map)来比较检测准确性。map计算如下所示:
[0122][0123][0124][0125][0126]
其中p代表精度,r代表召回率,tp代表真阳性,tn代表真阴性,fp代表假阳性,fn代表假阴性。n为类别数量,api代表第i个类的精度。
[0127]
参数设置
[0128]
在搜索阶段,采用416
×
416的图片输入,batch size为8,初始学习率为0.002,优化算法采用sgd,动量设为0.9,权重递减为4e-5,采用余弦退火方式更新学习率。总训练iterations为70000,前7000iterations只更新神经网络权重,7000iterations后同时更新
神经网络权重、架构参数α和阈值参数t,架构参数α和阈值参数t学习率固定为0.0003;在重训练阶段,采用416
×
416的图片输入,batch size为8,初始学习率为0.0001,优化算法采用sgd,动量设为0.9,权重递减为5e-4。采用余弦退火方式更新学习率,总训练iterations为63200。
[0129]
搜索性能的比较
[0130]
搜索出的多分支cnn结构如图7所示。通道数为512的cell有两个输入,通道数分别为192和256。
[0131]
表3展示了nas-xor、densenas和darts在搜索性能上的比较,统一采用416
×
416图片输入。darts通过搜索最佳cell最后进行堆叠最佳cell形成最终的神经网络结构,相比之下darts的搜索空间参数量较少,但由于cell中分支较多,在输入图片尺寸较大时,搜索时间较长;同样基于resnet的搜索空间进行densenas搜索,搜索速度最快。由于密集连接,nas-xor的搜索空间参数量是最大的,但收敛速度只略慢于densenas。最重要的是,darts和densenas都只能搜索单路径结构,而nas-xor可以搜索多分支结构。
[0132]
表3 不同nas方法的搜索性能比较
[0133][0134][0135]
表4展示了nas-xor与densenas和darts在测试集上的结果比较。如表4所示,nas-xor的map值高于densenas和darts。nas-xor在测试集上map值达到了99.1%,而darts和densenas的map值分别为96.6%和95.3%。在plate_bottom和plate_top两个小目标类的ap值上,nas-xor分别达到了96.8%和98.3%,而在densenas和darts中两个类分别最高的为94.1%和85.4%。因此,较于单路径的神经网络,多分支cnn结构可以同时利用到深层和浅层的特征,更有利于小目标检测。在检测器参数量上,nas-xor略高于densenas和darts。
[0136]
表4 yolov4检测器基于不同方法在测试集上的测试结果比较
[0137][0138]
相同或相似的标号对应相同或相似的部件;
[0139]
附图中描述位置关系的用于仅用于示例性说明,不能理解为对本专利的限制;
[0140]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。