技术特征:
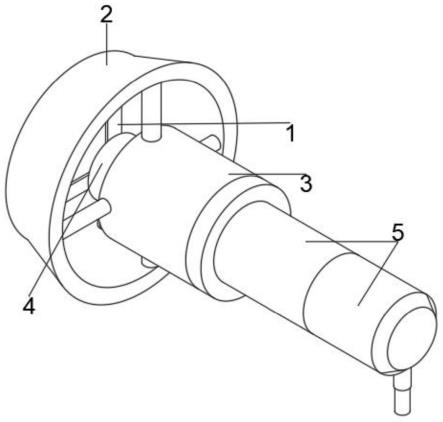
1.一种水下作业机器人高效大功率驱动控制器,包括螺旋桨(1)、导流罩(2)、磁耦合联动装置(4)、减速箱(3)以及驱动体(5),其特征在于,所述驱动体(5)内包括有驱动电路以及电性连接的驱动电机,所述驱动电路包括有相互电性连接的stm32f4单片机控制器、水密接插件、功率管驱动电路、功率逆变电路、温度传感器以及反电动势检测模块,所述驱动体(5)与水下机器人连接;所述stm32f4单片机控制器内电性连接有有can通信模块、温度处理器、算法模块、电流闭环过流保护模块以及转子监测模块。2.根据权利要求1所述的一种水下作业机器人高效大功率驱动控制器,其特征在于:所述螺旋桨(1)的浆叶为对称型结构,所述导流罩(2)的规格型号为no.19a。3.根据权利要求1所述的一种水下作业机器人高效大功率驱动控制器,其特征在于:所述磁耦合联动装置(4)包括有内转子部件、钛合金隔离套和外转子部件。4.根据权利要求1所述的一种水下作业机器人高效大功率驱动控制器,其特征在于:所述驱动电路包括有功率部分以及控制部分,所述功率部分采用6个n通道的mosfet组成三相全桥逆变电路;选用mosfet集成驱动芯片驱动功率管;采用三电阻的方式采集逆变桥三相相电流;采用反电动势法检测电子转子位置。5.根据权利要求4所述的一种水下作业机器人高效大功率驱动控制器,其特征在于:所述水下驱动系统通过尾部的所述水密接插件供电和通信,供电采用标准48v供电;采用所述can通信模块,并且搭配两根双绞线作为信号线。6.根据权利要求1所述的一种水下作业机器人高效大功率驱动控制器,其特征在于:所述stm32f4单片机控制器内嵌有fpu浮点运算单元。7.根据权利要求1所述的一种水下作业机器人高效大功率驱动控制器,其特征在于:所述驱动电机为大功率的bldc无刷电机,采用48v供电,最大功率为1500w,最高转速为1800rpm,正向最大推力为360n,最大有效轴功率为1130.4w,效率高达为75.36%;反向最大推力为312n,最大有效轴功率为1275.8w。8.一种水下作业机器人高效大功率驱动控制器的控制方法,其特征在于:包括如下步骤:s1:通过将驱动控制器与水下机器人进行连接,水下机器人尾部通过水密接插件给驱动控制器进行供电和通信,将信号同时传输至stm32f4单片机控制器、功率管驱动电路以及功率逆变电路,所述stm32f4单片机控制器采用can通信模块接收传输信号;同时为了构建水下驱动器的状态方程,建立驱动器的滑模观测系统,需先确定系统的状态变量、输入量和输出量,在项目系统中,状态变量为驱动器定子相电流差和线反电动势,输入为驱动器线电压,输出为相电流差;s2:然后利用所述stm32f4单片机控制器内部的算法模块进行计算,然后传输至所述功率管驱动电路以及所述功率逆变电路进行电路的控制,从而控制bldc无刷电机进行开启运行,从而使驱动控制器带动水下机器人进行运动;上述运动中将建立的螺旋桨(1)运动仿真模型作为负载模块加入基于滑模观测器位置检测的水下驱动器直接转矩控制系统中,得到螺旋桨负载特性下的直接转矩控制系统模型s3:所述功率逆变电路利用温度传感器检测mosfet工作温度,温度信号会传输至所述stm32f4单片机控制器内的温度处理器内,一旦检测到超过安全值立即停机,同时所述功率
逆变电路还利用电流闭环过流保护模块进行保护,在所述功率逆变电路将信号传输至bldc无刷电机的过程中会将信号同时传输至反电动势检测模块,所述反电动势检测模块会将检测的信心传输至所述stm32f4单片机控制器内的转子监测模块进行实时监测;s4:其中所述s1中新型滑模观测器应用于直接转矩控制系统中,估算出永磁电机的线反电势,并将其等效成三个离散的虚拟霍尔信号,在永磁电机正常工作时,通过使用该虚拟信号的输出而获得的电压空间矢量恰好能在定子上产生六边形的磁链,将这种方法应用于永磁电机直接转矩控制中,省略复杂的磁链计算和磁链给定,同时又能实现转矩快速响应,提高鲁棒性。
技术总结
本发明涉及水下作业设备技术领域,具体为一种水下作业机器人高效大功率驱动控制器,包括螺旋桨、导流罩、磁耦合联动装置、减速箱以及驱动体,驱动体内包括有驱动电路以及电性连接的驱动电机,驱动电路包括有相互电性连接的STM32F4单片机控制器、水密接插件、功率管驱动电路、功率逆变电路、温度传感器以及反电动势检测模块,驱动体与水下机器人连接;STM32F4单片机控制器内电性连接有有CAN通信模块、温度处理器、算法模块、电流闭环过流保护模块以及转子监测模块。本发明的高效驱动控制器使用了先进的磁耦合密封技术,体积、重量、水动性能、工作效率等多项参数达到了比较高的水平,从而能够整体提升驱动控制器驱动的稳定性与实用性。性。性。
技术研发人员:周汉涛 刘春明 贾涛 顾金鑫
受保护的技术使用者:江苏硕阳电子科技有限公司
技术研发日:2022.06.14
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。