1.本发明涉及一种检测装置,特别是涉及一种水下作业机器人高效大功率驱动控制器及其控制方法,属于水下作业设备技术领域。
背景技术:
2.随着海洋资源的开发和利用,自主水下航行器技术得到了越来越多人的关注,为了能够进一步完成自治的水下作业任务,水下潜器作业臂系统得到了极大的发展,通过在自主水下航行器上搭载水下机械臂,实现水下作业,例如:水下物品的打捞,开关阀门等,目前海产品的打捞主要靠潜水员携带的作业工具,潜水员海产品的打捞存在局限性,一方面潜水员不能长时间在水下作业,另一方面海域中存在一些潜水员无法到达的地方,限制潜水员的水下作业空间;国家对海洋开发高度重视,并积极发展海洋科学技术和教育,其中水下机器人作为水下安全检测强有力的工具,得到了越来越广泛的应用,这对于我们开发海洋环境具有重大意义;现有的水下作业机器人都是由驱动控制器以及机器人本体组成的,而驱动控制器在运转使用时还具有一定的使用缺陷。
3.因此,亟需对水下作业设备的驱动控制器进行改进,以解决上述存在的问题。
技术实现要素:
4.本发明的目的是提供一种水下作业机器人高效大功率驱动控制器及其控制方法,高效驱动控制器使用了先进的磁耦合密封技术,体积、重量、水动性能、工作效率等多项参数达到了比较高的水平,从而能够整体提升驱动控制器驱动的稳定性与实用性。
5.为了达到上述目的,本发明采用的主要技术方案包括:一种水下作业机器人高效大功率驱动控制器,包括螺旋桨、导流罩、磁耦合联动装置、减速箱以及驱动体,所述驱动体内包括有驱动电路以及电性连接的驱动电机,所述驱动电路包括有相互电性连接的stm32f4单片机控制器、水密接插件、功率管驱动电路、功率逆变电路、温度传感器以及反电动势检测模块,所述驱动体与水下机器人连接;所述stm32f4单片机控制器内电性连接有有can通信模块、温度处理器、算法模块、电流闭环过流保护模块以及转子监测模块。
6.优选的,所述螺旋桨的浆叶为对称型结构,所述导流罩的规格型号为no.19a。
7.优选的,所述磁耦合联动装置包括有内转子部件、钛合金隔离套和外转子部件。
8.优选的,所述驱动电路包括有功率部分以及控制部分,所述功率部分采用6个n通道的mosfet组成三相全桥逆变电路;选用mosfet集成驱动芯片驱动功率管;采用三电阻的方式采集逆变桥三相相电流;采用反电动势法检测电子转子位置。
9.优选的,所述水下驱动系统通过尾部的所述水密接插件供电和通信,供电采用标准48v供电;采用所述can通信模块,并且搭配两根双绞线作为信号线。
10.优选的,所述stm32f4单片机控制器内嵌有fpu浮点运算单元。
11.优选的,所述驱动电机为大功率的bldc无刷电机,采用48v供电,最大功率为1500w,最高转速为1800rpm,正向最大推力为360n,最大有效轴功率为1130.4w,效率高达为75.36%;反向最大推力为312n,最大有效轴功率为1275.8w。
12.一种水下作业机器人高效大功率驱动控制器的控制方法,包括如下步骤:s1:通过将驱动控制器与水下机器人进行连接,水下机器人尾部通过水密接插件给驱动控制器进行供电和通信,将信号同时传输至stm32f4单片机控制器、功率管驱动电路以及功率逆变电路,所述stm32f4单片机控制器采用can通信模块接收传输信号;同时为了构建水下驱动器的状态方程,建立驱动器的滑模观测系统,需先确定系统的状态变量、输入量和输出量,在项目系统中,状态变量为驱动器定子相电流差和线反电动势,输入为驱动器线电压,输出为相电流差;s2:然后利用所述stm32f4单片机控制器内部的算法模块进行计算,然后传输至所述功率管驱动电路以及所述功率逆变电路进行电路的控制,从而控制bldc无刷电机进行开启运行,从而使驱动控制器带动水下机器人进行运动;上述运动中将建立的螺旋桨(1)运动仿真模型作为负载模块加入基于滑模观测器位置检测的水下驱动器直接转矩控制系统中,得到螺旋桨负载特性下的直接转矩控制系统模型s3:所述功率逆变电路利用温度传感器检测mosfet工作温度,温度信号会传输至所述stm32f4单片机控制器内的温度处理器内,一旦检测到超过安全值立即停机,同时所述功率逆变电路还利用电流闭环过流保护模块进行保护,在所述功率逆变电路将信号传输至bldc无刷电机的过程中会将信号同时传输至反电动势检测模块,所述反电动势检测模块会将检测的信心传输至所述stm32f4单片机控制器内的转子监测模块进行实时监测;s4:其中新型滑模观测器应用于直接转矩控制系统中,估算出永磁电机的线反电势,并将其等效成三个离散的虚拟霍尔信号,在永磁电机正常工作时,通过使用该虚拟信号的输出而获得的电压空间矢量恰好能在定子上产生六边形的磁链,所以将这种方法应用于永磁电机直接转矩控制中,省略复杂的磁链计算和磁链给定,同时又能实现转矩快速响应,提高鲁棒性。
13.本发明至少具备以下有益效果:1、高效驱动控制器使用了先进的磁耦合密封技术,体积、重量、水动性能、工作效率等多项参数达到了比较高的水平,从而能够整体提升驱动控制器驱动的稳定性与实用性。
14.2、创新设计电机本体和动力驱动电路集成一体化的驱动控制器结构,集驱动电机、减速器、螺旋桨和导流罩以及控制电路于一体,具有高集成度、控制简单、易于安装、维护方便、体积小、重量轻、噪声振动小,散热好、功率密度大、效率高、适用范围广等优点。
15.3、研制高功率密度永磁电机及其驱动器,永磁电动机单机容量的不断扩大,对其驱动器的要求也越来越高,研究开发出不断完善的大功率永磁电动机驱动器,将是决定大功率永磁电动机能否可靠运行的关键,研制的水下高效电动驱动器采用48v供电,最大功率1500w,最高转速1800rpm,正向最大推力360n,最大有效轴功率1130.4w,效率高达75.36%;反向最大推力312n,最大有效轴功率1275.8w,效率高达85.05%。
16.4、电机控制器性能特点:过热保护功能避免调速器内部元件工作在过热环境中,
能显著延长元件工作寿命,限流保护功能除了能在电机堵转时保护调速器内部元件,还能防止电机过热,异常保护能在控制器或电机出现异常时迅速关断,避免故障进一步扩大,欠压保护功能可以避免蓄电池过度放电,显著延长蓄电池寿命,减少用户不必要的损失。
17.5、温度传感器用于检测mos管的工作温度,一旦超过设定的安全值,单片机就输出一个报警信号,停止电机运行,采用反电动势过零检测法检测电机转子位置并计算电机转速,减小了电机的安装尺寸、降低了成本、提高了电机运行的可靠性。
18.6、驱动系统最大功率达到1500w,最大工作电流超过了30a,给pcb板上元器件的位置布置与走线带来了极大的难度,加大了电磁兼容设计的难度,此外大电流必定带来了大的热量,因此在pcb板上设计了散热装置,使mos管紧贴在散热片上,散热片将热量传导到舱壁上,实现水冷散热。
附图说明
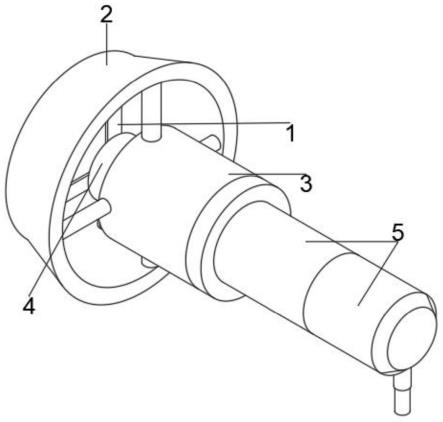
19.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:图1为本发明的立体结构示意图;图2为本发明的控制原理流程图;图3为本发明的磁耦合部件工作原理图;图4为本发明的直接转矩控制原理框图。
20.图中,1-螺旋桨,2-导流罩,3-减速箱,4-磁耦合联动装置,5-驱动体。
具体实施方式
21.以下将配合附图及实施例来详细说明本技术的实施方式,借此对本技术如何应用技术手段来解决技术问题并达成技术功效的实现过程能充分理解并据以实施。
22.如图1-图4所示,本实施例提供的水下作业机器人高效大功率驱动控制器,包括螺旋桨1、导流罩2、磁耦合联动装置4、减速箱3以及驱动体5,水下高效电动驱动器结构由螺旋桨1、导流罩2、磁耦合联动装置4、减速箱3、永磁电机和驱动电路等几部分组成驱动控制器整体;驱动体5内包括有驱动电路以及电性连接的驱动电机,驱动电机的转子经过减速箱与磁耦合联轴器输入轴相连,由驱动电机带动磁耦合联动装置4转动,磁耦合联动装置4的输出轴与螺旋桨1相连,磁耦合联动装置4与螺旋桨1同步转动,进而达到电力传动的效果;驱动电路包括有相互电性连接的stm32f4单片机控制器、水密接插件、功率管驱动电路、功率逆变电路、温度传感器以及反电动势检测模块,驱动体5与水下机器人连接;stm32f4单片机控制器内嵌有fpu浮点运算单元,能够大大增强数据运算能力;stm32f4单片机控制器内电性连接有有can通信模块、温度处理器、算法模块、电流闭环过流保护模块以及转子监测模块,水下驱动系统通过尾部的水密接插件供电和通信,供电采用标准48v供电;采用can通信模块,并且搭配两根双绞线作为信号线,保证了控制系统的实时性和可靠性,同时方便后续功能的升级改造。
23.进一步的,螺旋桨1的浆叶为对称型结构,螺旋桨1是整个驱动控制器中的极其关
键的组成模块,在水下驱动系统初步设计完成后,采用flunt软件进行阻力仿真实验和有效推力估算,再结合电机的最大输出转速从而设计出一个效率最优的螺旋桨1,基于以上分析,同时考虑到机器人的运动状态,其水下驱动系统需同时具备较好的正车与倒车特性,因此采用对称型结构的螺旋桨1,导流罩2的规格型号为no.19a,选用的导管规格为no.19a,是典型的加速型导管,这种导管能够有效的提高螺旋桨1效率,使螺旋桨1在各种载况下都能良好的运转。
24.进一步的,磁耦合联动装置4包括有内转子部件、钛合金隔离套和外转子部件,磁力耦合器密封方式不同于充油式压力补偿的动密封技术,它是通过磁力的传递将电机扭力透过一个静止的物体传递给螺旋桨,此方法将水下驱动器需动密封的部件转化为只需静密封就能达到很好的密封效果,与传统的磁耦合器不同的是,水下驱动器磁耦合器的内外转子之间的气隙较大,便于在气隙内固定有静止不动的钛合金隔离套,保护其不受海水侵蚀;水下驱动系统磁耦合部件共由三部分组成,包括内转子部件、钛合金隔离套和外转子部件,通过电机的转子与磁耦合器的内转子部件相连接,使得两者同步旋转,并由内转子产生旋转的磁场,旋转的磁场穿透静止不动的钛合金隔离套,对外转子部件产生作用,使其同速旋转,因螺旋桨1固定于外转子部件之上,所以螺旋桨1在外转子的作用下也同速旋转。
25.进一步的,驱动电路包括有功率部分以及控制部分,功率部分采用6个n通道的mosfet组成三相全桥逆变电路;选用mosfet集成驱动芯片驱动功率管;采用三电阻的方式采集逆变桥三相相电流;采用反电动势法检测电子转子位置,其中控制部分根据转子位置计算转速;采用温度传感器检测mosfet工作温度,一旦超过安全值立即停机;为了提高控制系统的实时性和抗电磁干扰能力,且具备主从通信能力,选用stm32f4系列高频arm作为驱动系统的控制器。
26.进一步的,驱动电机为大功率的bldc无刷电机,大的恒功率范围对获得高的驱动效率是至关重要的,永磁电动机一般是在基速和两倍以内的最高转速范围工作,需要通过绕组、磁钢和铁芯的参数匹配实现2-3倍的速度范围,提高恒功率范围,采用48v供电,最大功率为1500w,最高转速为1800rpm,正向最大推力为360n,最大有效轴功率为1130.4w,效率高达为75.36%;反向最大推力为312n,最大有效轴功率为1275.8w,驱动电机使用三相全桥驱动,即6个mosfet分别构成上下桥臂,通过单片机gpio口推挽输出互补的pwm波控制mos管的顺序导通,使电机电枢上通过连续的电流,由于单片机的i/o口输出功率小,不足以驱动mos管的导通,因此设计mos管驱动电路,采用ir公司的mos管专用驱动芯片ir2101,一个桥臂采用一个ir2101驱动上下两个mos管,自举电容将电压泵升到24v,保证mos管的gs电压超过导通电压,开通mos管。驱动信号波形互补且加入了死区,能够有效避免桥臂串红。
27.一种水下作业机器人高效大功率驱动控制器的控制方法,包括如下步骤:s1:通过将驱动控制器与水下机器人进行连接,水下机器人尾部通过水密接插件给驱动控制器进行供电和通信,将信号同时传输至stm32f4单片机控制器、功率管驱动电路以及功率逆变电路,stm32f4单片机控制器采用can通信模块接收传输信号;同时为了构建水下驱动器的状态方程,建立驱动器的滑模观测系统,需先确定系统的状态变量、输入量和输出量,在项目系统中,状态变量为驱动器定子相电流差和线反电动势,输入为驱动器线电压,输出为相电流差;s2:然后利用stm32f4单片机控制器内部的算法模块进行计算,然后传输至功率管
驱动电路以及功率逆变电路进行电路的控制,从而控制bldc无刷电机进行开启运行,从而使驱动控制器带动水下机器人进行运动;上述运动中将建立的螺旋桨1运动仿真模型作为负载模块加入基于滑模观测器位置检测的水下驱动器直接转矩控制系统中,得到螺旋桨1负载特性下的直接转矩控制系统模型;s3:功率逆变电路利用温度传感器检测mosfet工作温度,温度信号会传输至stm32f4单片机控制器内的温度处理器内,一旦检测到超过安全值立即停机,同时功率逆变电路还利用电流闭环过流保护模块进行保护,在功率逆变电路将信号传输至bldc无刷电机的过程中会将信号同时传输至反电动势检测模块,反电动势检测模块会将检测的信心传输至stm32f4单片机控制器内的转子监测模块进行实时监测;s4:其中s1中新型滑模观测器应用于直接转矩控制系统中,估算出永磁电机的线反电势,并将其等效成三个离散的虚拟霍尔信号,在永磁电机正常工作时,通过使用该虚拟信号的输出而获得的电压空间矢量恰好能在定子上产生六边形的磁链,将这种方法应用于永磁电机直接转矩控制中,省略复杂的磁链计算和磁链给定,同时又能实现转矩快速响应,提高鲁棒性。
28.如在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可理解,硬件制造商可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名称的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”为一开放式用语,故应解释成“包含但不限定于”。“大致”是指在可接收的误差范围内,本领域技术人员能够在一定误差范围内解决技术问题,基本达到技术效果。
29.需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的商品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种商品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的商品或者系统中还存在另外的相同要素。
30.上述说明示出并描述了本发明的若干优选实施例,但如前所述,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述发明构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。