技术特征:
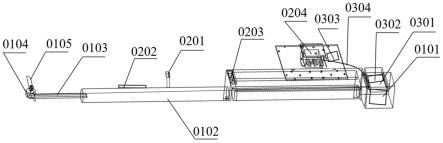
1.一种基于视觉定位的无人机自动除梢装置,其特征在于,包括修剪除梢机构、冬梢和夏梢的视觉定位组件、以及控制及信息传输设备,所述的修剪除梢机构包括电池、支撑杆、电机托板、无刷直流电机和双面刀片;所述的电池为无人机自动除梢装置提供电能,所述的电机托板一端与支撑杆固定连接,另一端托起无刷直流电机,与无刷直流电机固定连接;所述的双面刀片与无刷直流电机固定连接,无刷直流电机转动时带动双面刀片做旋转运动;所述的冬梢和夏梢的视觉定位组件包括rgb-d相机、光纤传感器、光纤放大器和微型处理器;所述的rgb-d相机安装在修剪除梢机构的支撑杆中间位置,由彩色相机和红外相机组成;所述的彩色相机提供红、绿、蓝三个通道的信息,用于采集rgb图像;所述的红外相机提供了一个深度信息通道,用于采集深度图像;所述的rgb-d相机同时获取冬梢和夏梢的颜色、轮廓和位置特征;所述的光纤传感器将采集的光信号解析后传输给光纤放大器;所述的微型处理器安装在无人机的最上方;所述的控制及信息传输设备包括arduino开发板、继电器、电子调速器和usb-typeb数据线;所述的arduino开发板与微型处理器、光纤放大器、继电器连接;所述的电子调速器用于控制调节无刷直流电机的转速;所述的usb-typeb数据线用于连接arduino开发板与微型处理器,实现程序下载和数据通讯。2.根据权利要求1所述一种基于视觉定位的无人机自动除梢装置,其特征在于,所述的支撑杆采用碳纤维材料;所述的双面刀片采用sk5高速钢材料。3.根据权利要求1所述一种基于视觉定位的无人机自动除梢装置,其特征在于,所述的无刷直流电机由电动机主体和驱动器组成,以自控式运行。4.根据权利要求1所述一种基于视觉定位的无人机自动除梢装置,其特征在于,所述光纤传感器是漫反射光纤传感器,当有冬梢或者夏梢进入到双面刀片区间时,光纤传感器将对此光信号进行解调分析,将获得的距离传输给光纤放大器。5.根据权利要求1所述一种基于视觉定位的无人机自动除梢装置,其特征在于,所述的微型处理器内置存储器、nvidia jetson nx gpu和8gb ram,所述的存储器为计算机可读存储设备,其存储有ubuntu18.04操作系统、python编程语言编写的冬梢和夏梢的视觉定位算法的相关程序;所述的nvidia jetson nx gpu和8gb ram用于执行python编程语言的相关程序。6.根据权利要求1所述一种基于视觉定位的无人机自动除梢装置,其特征在于,所述的继电器通过三条杜邦线与arduino开发板相连接;所述的三条杜邦线分别连接到arduino开发板上的正负极和信号输出端口上,用于为继电器提供电源和输入信号。7.根据权利要求1-6中任一项所述一种基于视觉定位的无人机自动除梢装置的控制方法,其特征在于,包括下述步骤:无人机带动自动除梢装置飞行到第一棵果树的斜上方;采用rgb-d相机采集冬梢或者夏梢的rgb图像和深度图像,输入给微型处理器;微型处理器上运行模糊图像判断程序,只保留清晰图像;微型处理器上运行冬梢或者夏梢视觉定位程序,将定位信息处理后转换为无人机飞行的路径信息,传输给飞行控制器,控制无人机飞行到目的地位置;光纤传感器检测到冬梢或者夏梢进入双面刀片区间时,光纤放大器向微型处理器发射
信号;微型处理器收到光纤放大器的信号后运行冬梢或者夏梢定位程序,再次定位冬梢或者夏梢并判断无人机是否到达目的地位置;微型处理器给arduino开发板发送运行程序信号,arduino开发板运行程序后启动继电器开关闭合;电子调速器控制无刷直流电机启动,带动双面刀片做圆周旋转运动,切断冬梢或者夏梢的主枝条;光纤传感器检测到冬梢或者夏梢被去除后,光纤放大器给微型处理器发送信号,微型处理器给飞行控制器发送信号,完成冬梢或者夏梢除梢任务。8.根据权要求7所述的控制方法,其特征在于,所述采用rgb-d相机采集冬梢或者夏梢的rgb图像和深度图像,输入给微型处理器,具体为:rgb-d相机中的彩色相机采集冬梢或者夏梢的rgb图像,红外相机采集冬梢或者夏梢的深度图像,深度图像中每个像素点保存的数据是冬梢或者夏梢与相机之间的距离信息。9.根据权要求7所述的控制方法,其特征在于,所述微型处理器上运行冬梢或者夏梢视觉定位程序,将定位信息处理后转换为无人机飞行的路径信息,具体为:微型处理器上运行冬梢或者夏梢视觉定位程序后,输出多个备选冬梢或者夏梢的最大外接矩形框,通过计算获得冬梢或者夏梢的最大外接矩形框在rgb图像中的中心点像素坐标;将此坐标映射到优化的深度图像上,以提取冬梢或者夏梢的三维空间信息,通过融合冬梢或者夏梢在rgb图像中的中心点像素坐标和在深度图像上提取的深度信息,获得冬梢或者夏梢在rgb-d相机坐标系中的三维空间坐标;通过rgb-d相机和无人机中心的位置关系,将rgb-d相机坐标系中的坐标转换为无人机坐标系中的坐标,计算得出无人机的飞行目的地坐标。10.根据权要求7所述的控制方法,其特征在于,所述电子调速器控制无刷直流电机启动,带动双面刀片做圆周旋转运动,剪断冬梢或者夏梢的枝条,具体为:电子调速器设定无刷直流电机的电流和电压值后,启动无刷直流电机开始转动,带动双面刀片做圆周旋转运动,当双面刀片与冬梢或者夏梢的枝条接触时,瞬间切断冬梢或者夏梢的主枝条。
技术总结
本发明公开了一种基于视觉定位的无人机自动除梢装置及其控制方法,装置包括:修剪除梢机构、冬梢和夏梢的视觉定位组件、以及控制及信息传输设备,所述的修剪除梢机构包括电池、支撑杆、电机托板、无刷直流电机和双面刀片;所述的冬梢和夏梢的视觉定位组件包括RGB-D相机、光纤传感器、光纤放大器和微型处理器;所述的控制及信息传输设备包括Arduino开发板、继电器、电子调速器和USB-TypeB数据线;本发明搭载在无人机平台上,能够适应丘陵果园的复杂地形条件,有效解决了地面修剪机器人面对高大果树上的冬梢或者夏梢无法工作的问题。高大果树上的冬梢或者夏梢无法工作的问题。高大果树上的冬梢或者夏梢无法工作的问题。
技术研发人员:李君 李灯辉 周峥琦 林佩怡 黄光文 周浩波 姚中威 贾宇航 李钊 陈盈宜 伍源水
受保护的技术使用者:华南农业大学
技术研发日:2022.05.30
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。