技术特征:
1.一种基于大数据的脱硫岛智能控制方法,其特征在于,包括以下步骤:s1.基于历史大数据挖掘相应机组各工况下的最优控制效果;s2.使用预测器基于当前输入和输出预测未来k时刻工况;s3.基于步骤s1挖掘的各工况最优控制效果及步骤s2预测的工况,确定优化器的期望输出值;s4.优化器基于期望输出值计算控制对象未来k时刻的优化控制输入u(k)。2.根据权利要求1所述的基于大数据的脱硫岛智能控制方法,其特征在于,步骤s1具体包括:s11.获取相应机组的历史数据,并从历史数据中筛选稳态工况;s12.将筛选出的稳态工况进行工况分类;s13.挖掘各分类工况下的最优控制效果。3.根据权利要求2所述的基于大数据的脱硫岛智能控制方法,其特征在于,所述的相应机组为一台机组或同厂同型号的多台机组;步骤s4中的控制对象为与步骤s1中的相应机组相同的同台机组,或为与步骤s1中的相应机组为同厂同型号的机组。4.根据权利要求2所述的基于大数据的脱硫岛智能控制方法,其特征在于,步骤s11中,采用过程能力指标作为评价方法筛选稳态工况:式中,usl为数据的上限,lsl为数据的下限,为数据样本均值,σ(x)为样本标准差,当一段工况的cpk值在设定范围内且维持时间达到设定时间时判定相应工况为稳态工况;且筛选稳态工况所评价的指标包括一次风流量、二次风流量、总给煤量、主蒸汽压力四个指标。5.根据权利要求4所述的基于大数据的脱硫岛智能控制方法,其特征在于,步骤s12中,采用模糊c均值算法对各稳态工况进行聚类以进行工况分类:采用模糊c均值算法对各稳态工况进行聚类以进行工况分类:式中,m是聚类的簇数;u
ij
表示样本x
i
属于j类的隶属度,i表示第i个样本,x是具有d维特征的一个样本,c
j
是j簇的聚类中心,也具有d维度,||*||可以是任意表示距离的度量;终止迭代的条件是两次迭代的隶属度变化小于误差阈值,如下式:式中,其中k为迭代步数,ε为误差阈值。6.根据权利要求5所述的基于大数据的脱硫岛智能控制方法,其特征在于,步骤s13中,
采用粒子群寻优算法从各分类工况中挖掘相应工况的最优控制效果:s131.初始化为一群随机粒子;s132.通过迭代找到最优解;s133.在每一次的迭代中,粒子通过跟踪两个“极值”(pbest,gbest)来更新自己;s134.在找到这两个最优解后,粒子通过下面的公式来更新自己的速度和位置:粒子通过下面的公式来更新自己的速度和位置:式中,代表第id个粒子在第k次迭代时的速度向量,代表第id个粒子在第k次迭代时的位置向量,代表第id个粒子在截止第k次迭代时所有粒子的历史最优位置向量,代表第id个粒子在截止第k次迭代时当前粒子的历史最优位置向量;ω为惯性权重,越大代表全局寻优能力强,局部寻优能力弱;c1代表粒子自我学习因子,c2代表粒子全局学习因子;r1和r2为0-1的随机数。7.根据权利要求1-6任意一项所述的基于大数据的脱硫岛智能控制方法,其特征在于,步骤s2-s4中,采用基于广义预测控制gpc为系统的控制器,通过gpc的gpc预测器和gpc优化器分别实现步骤s2-s4的预测器和优化器功能。8.根据权利要求7所述的基于大数据的脱硫岛智能控制方法,其特征在于,通过如下方式获得步骤s2中的预测器:采用carima模型作为预测模型,如下式中,a(z-1
)=1 a1z-1
…
a
n
z-n
,以下简记为a;b(z-1
)=b0 b1z-1
…
b
n
z-nb
,以下简记为b;c(z-1
)=c0 c1z-1
…
c
n
z-nc
,并令c(z-1
)=1;δ表示差分算子,δ=1-z-1
;y(k),u(k-1),ξ(k)分别是系统的输出、输入和干扰信号;z-1
是后移时间算子,是z变换的逆算子;gpc预测器通过模型公式7推导出在k j时刻的输出预测值:即可得:1=aδ[e0 e1z-1
e2z-2
…
e
j-1
z-(j-1)
] z-j
aδ(e
j
e
j 1
z-1
…
)公式9结合丢番图方程,将公式7左右两侧同时乘以e
j
(z-1
)δ后得到时刻k后j步的预测方程为:y(k j)=e
j
bδu(k j-1) f
j
y(k) e
j
ξ(k j)公式10即根据当前次输入u(k)、输出y(k)预测下一次输出值y(k j),e
j
ξ(k j)值因较小在计算时忽略;j为预测步长,当j=1时,可得
y(k 1|k)=g1δu(k) (g
1-g1)δu(k) f1y(k)公式11当j=2时,有进而可得j=p时,有考虑控制时域为m,即当j>m时,控制增量为0,则令:则系统输出未来的预测结果为:y
p
(k)=y
f
(k) gδu(k)公式15。预测方式为:按照最新输入、输出参数,依次递推估计得出a(z-1
)、b(z-1
);根据得出的a(z-1
),求出e
j
(z-1
)、f
j
(z-1
);根据得出的b(z-1
)、e
j
(z-1
)和f
j
(z-1
),计算出g的元素,并计算y
f
(k)、δu(k);根据公式15得到预测结果。9.根据权利要求8所述的基于大数据的脱硫岛智能控制方法,其特征在于,步骤s3和s4中的优化器如下:其中,ω为对象的期望输出值,λ
i
为控制加权系数,p0和p分别是优化时域的初始值和终值,且p0大于对象的时滞步长;使公式16最小得到最优控制量为:u(k)=u(k-1) g
t
(w-f)公式17其中,g
t
为矩阵(g
t
g λi)-1
g
t
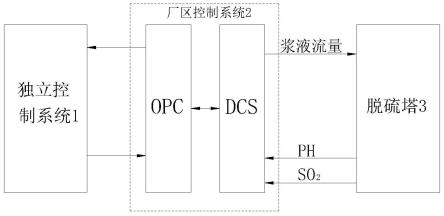
的第一行矢量,i为丢番图方程,λ表示系数。10.一种基于大数据的脱硫岛智能控制系统,其特征在于,包括独立控制系统(1),且所述的独立控制系统(1)连接于产区控制系统(2),所述的产区控制系统(2)包括dcs控制层和opc数据采集服务器,所述的dcs控制层用于监测ph和so2并对脱硫塔进行浆液流量控制,所
述opc数据采集服务器用于采集厂区数据并送入本独立控制系统(1),由本独立控制系统(1)基于厂区数据通过权利要求1-9任意一项所述的方法计算优化控制输入u(k),并将优化控制输入u(k)发送给opc数据采集服务器,由opc数据采集服务器将优化控制输入u(k)发送给dcs控层以进行优化控制。
技术总结
本方案公开了一种基于大数据的脱硫岛智能控制方法及其控制系统,包括以下步骤:S1.基于历史大数据挖掘相应机组各工况下的最优控制效果;S2.使用预测器基于当前输入和输出预测未来K时刻工况;S3.基于步骤S1挖掘的各工况最优控制效果及步骤S2预测的工况,确定优化器的期望输出值;S4.优化器基于期望输出值计算控制对象未来K时刻的优化控制输入u(K)。本方案利用历史数据挖掘各工况下的最优控制效果,然后使用预测器预测未来某时刻的工况,并基于该工况下挖掘的最优控制效果来优化输入,实现单台机组脱硫系统时间尺度上的综合优化,同厂同型号不同机组间的对标优化,发掘脱硫系统优化空间,实现脱硫系统经济效应最大化。实现脱硫系统经济效应最大化。实现脱硫系统经济效应最大化。
技术研发人员:张兰庆 张军 徐贤国 戴辉 孟晓强 毕玉龙 李治彦 陈起 翁浩斌 尹贵豪
受保护的技术使用者:上海鉴智软件技术有限公司
技术研发日:2022.06.13
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。