技术特征:
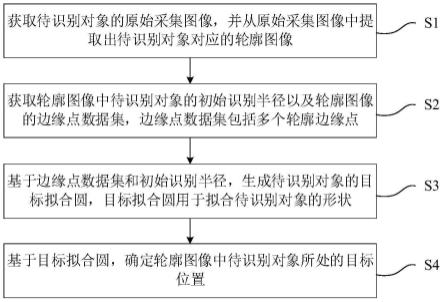
1.一种对象的定位方法,其特征在于,包括:获取待识别对象的原始采集图像,并从所述原始采集图像中提取出所述待识别对象对应的轮廓图像;获取所述轮廓图像中所述待识别对象的初始识别半径以及所述轮廓图像的边缘点数据集,所述边缘点数据集包括多个轮廓边缘点;基于所述边缘点数据集和所述初始识别半径,生成所述待识别对象的目标拟合圆,所述目标拟合圆用于拟合所述待识别对象的形状;基于所述目标拟合圆,确定所述轮廓图像中所述待识别对象所处的目标位置。2.根据权利要求1所述的对象的定位方法,其特征在于,所述获取所述轮廓图像中所述待识别对象的初始识别半径,包括:对所述轮廓图像进行扫描,并获取所述轮廓图像中同一扫描方向上的两个外部轮廓边缘点的坐标差值数据;基于所述坐标差值数据,生成所述待识别对象对应对象轮廓的坐标差值曲线;基于所述坐标差值曲线,确定所述待识别对象的初始识别半径。3.根据权利要求1或2所述的对象的定位方法,其特征在于,所述获取所述轮廓图像中所述待识别对象的初始识别半径,包括:获取所述轮廓图像中所述待识别对象的对象数量;在所述对象数量为一个的情况下,以横向扫描方向以及纵向扫描方向对所述轮廓图像进行扫描,并获取所述轮廓图像中同一扫描方向上的两个外部轮廓边缘点的坐标差值数据;基于所述坐标差值数据,生成所述待识别对象对应对象轮廓的坐标差值曲线;获取所述坐标差值曲线的峰值,并基于预设第一比例和所述峰值确定所述待识别对象的初始识别半径。4.根据权利要求1或2所述的对象的定位方法,其特征在于,所述获取所述轮廓图像中所述待识别对象的初始识别半径,包括:获取所述轮廓图像中所述待识别对象的对象数量;在所述对象数量为至少两个的情况下,获取所述轮廓图像中对象轮廓的最大坐标差值;基于所述最大坐标差值和预设坐标差值阈值确定至少两个所述待识别对象的对象分布姿态,并基于所述对象分布姿态确定目标扫描方向;以所述目标扫描方向对所述轮廓图像进行扫描,并获取所述轮廓图像中同一扫描方向上的两个外部轮廓边缘点的坐标差值数据;基于所述坐标差值数据,生成所述待识别对象对应对象轮廓的坐标差值曲线;基于所述坐标差值曲线和所述对象分布姿态,确定第一个所述待识别对象的初始识别半径。5.根据权利要求1或2所述的对象的定位方法,其特征在于,所述基于所述边缘点数据集和所述初始识别半径,生成所述待识别对象的目标拟合圆,包括:从所述边缘点数据集中选取多个轮廓边缘点作为初始拟合边缘点,所述初始拟合边缘点的数量大于或者等于三个;
基于所述初始拟合边缘点生成所述待识别对象的初始拟合圆,并判断所述初始拟合圆的半径是否在所述初始识别半径的第一容差范围内;在所述初始拟合圆的半径在所述初始识别半径的第一容差范围内的情况下,从所述边缘点数据集中获取在所述初始拟合圆的第二容差范围内的所有轮廓边缘点作为所述初始拟合圆的内点,并将所述初始拟合圆的内点作为目标拟合边缘点;基于所述目标拟合边缘点,生成所述待识别对象的目标拟合圆。6.根据权利要求4所述的对象的定位方法,其特征在于,所述基于所述边缘点数据集和所述初始识别半径,生成所述待识别对象的目标拟合圆,包括:在所述对象数量为至少两个的情况下,基于第一个所述待识别对象的初始识别半径和所述边缘点数据集,生成第一个所述待识别对象的初始拟合圆;从所述边缘点数据集中获取在所述初始拟合圆的第二容差范围内的所有轮廓边缘点作为所述初始拟合圆的内点,并获取当前剩余边缘点数据集;将所述初始拟合圆的内点作为第一个所述待识别对象的目标拟合边缘点,并基于所述目标拟合边缘点生成第一个所述待识别对象的目标拟合圆;对所述当前剩余边缘点数据集进行扫描,以获取第二个所述待识别对象的初始识别半径,基于所述初始识别半径和所述当前剩余边缘点数据集生成第二个所述待识别对象的目标拟合圆;更新所述当前剩余边缘点数据集,并基于更新后的当前剩余边缘点数据集,重复执行上述获取初始识别半径以及生成目标拟合圆的步骤,直至生成每一所述待识别对象的目标拟合圆。7.根据权利要求1所述的对象的定位方法,其特征在于,所述从所述原始采集图像中提取出所述待识别对象对应的轮廓图像,包括:对所述原始采集图像进行形态学开运算处理以及滤波处理,得到预处理图像;基于预设色差分析法对所述预处理图像中的对象图像区域与背景图像区域进行分割处理,以从所述预处理图像中提取出对象区域图像;对所述对象区域图像进行形态学闭运算处理以及阈值面积区域消除处理,得到目标二值图像;从所述目标二值图像中提取出所述原始采集图像对应的轮廓图像。8.一种对象的定位装置,其特征在于,包括:轮廓提取模块,用于获取待识别对象的原始采集图像,并从所述原始采集图像中提取出所述待识别对象对应的轮廓图像;初始识别模块,用于获取所述轮廓图像中所述待识别对象的初始识别半径以及所述轮廓图像的边缘点数据集,所述边缘点数据集包括多个轮廓边缘点;目标拟合模块,用于基于所述边缘点数据集和所述初始识别半径,生成所述待识别对象的目标拟合圆,所述目标拟合圆用于拟合所述待识别对象的形状;位置识别模块,用于基于所述目标拟合圆,确定所述轮廓图像中所述待识别对象所处的目标位置。9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所
述对象的定位方法。10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述对象的定位方法。
技术总结
本发明提供一种对象的定位方法、装置、电子设备和可读存储介质,其中,所述方法通过获取待识别对象的原始采集图像,并从原始采集图像中提取出待识别对象对应的轮廓图像;获取轮廓图像中待识别对象的初始识别半径以及轮廓图像的边缘点数据集,边缘点数据集包括多个轮廓边缘点;基于边缘点数据集和初始识别半径,生成待识别对象的目标拟合圆,目标拟合圆用于拟合待识别对象的形状;基于目标拟合圆,确定轮廓图像中待识别对象所处的目标位置,解决了现有技术中无法准确高效地对被遮挡的对象进行识别和定位的技术问题。行识别和定位的技术问题。行识别和定位的技术问题。
技术研发人员:赵龙莲 原育慧 杨增荣 郑建华 李军会
受保护的技术使用者:中国农业大学
技术研发日:2022.06.10
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。