1.本发明属于生产安全技术领域,具体涉及用于工厂安全生产的应急系统。
背景技术:
2.随着科学技术的进步与生产为的发展,安防监控已逐渐成为工业厂区建设中极为重要的一环,一个现代化的工业厂区,其安防监控系统的设置不仅需要满足厂区的安全要求,还要符合现代化企业安全的管理要求。
3.如今多数外资企业在国内均设有工厂,这类企业的安防系统一般都建设的较为完善,应用水平也较高。相比而言,国内一些企业工厂的建设起步较晚,系统建设成本较低,后期的维护也不够到位,大多数工厂只是建设了基本的视频监控,相当一部分还仍在使用传统的模拟摄像机,所采集的视频图像清晰度和效果均一般。
4.随着企业工厂规模的扩大,多数企业对安全管理给予了更多的重视,已经开始不满足于简单的视频监控和防盗预警,且在生产过程中,经常会出现一些设备故障或人员伤亡等突发事件,这些突发事件由于事件发生、发展的速度很快,且出乎意料,对正常生产和效益造成较大的伤害,因此需要加强对各生产现场的监控,以便对突发事件进行提前预警并作出及时应对,从而保证人员的人身安全,减小企业的经济损失。
技术实现要素:
5.本发明的目的是为了解决背景技术中所提出的问题,而提供用于工厂安全生产的应急系统,通过监测单元对工厂内全面进行安全监测,消除安全隐患,当发生事故时,监测单元的报警器发出报警,上位机的应急救援单元根据对事故发生处的定位以及预测分析,为事故的救援提供决策以及为救援人员提供最优的赶往事故地的路径,在短时间内快速响应,减少损失。
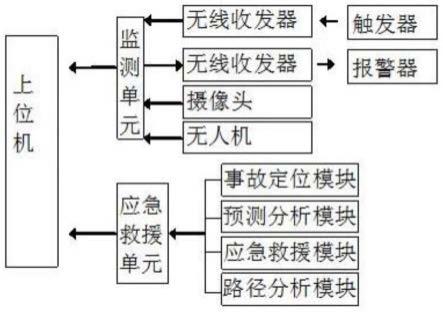
6.本发明的目的是这样实现的:用于工厂安全生产的应急系统,包括监测单元、应急救援单元和上位机,其中,监测单元,包括触发器、无线收发器和报警器,触发器将传感信号通过触发编码器经过编码后传送至端口组合,上位机将通过端口组合获取的触发事件进行查验检测识别,获取触发器的告警信息并启动报警器,根据上位机预先设定启动相应的预案报警动作,并记录触发事故的时间、故障名称以及处警动作并备案;应急救援单元,根据监测单元的传感信号,结合gis空间服务和gps定位服务,为救援工作者提供救援决策。
7.优选的,所述的监测单元还包括有分散在工厂内各处的用于网络视频监控的摄像头,将摄像头的物理位置在gis地图中标注与关联,当发生异常情况时,根据事件的物理区域调取相应的视频信息,实现视频监控,形成集中监控模式,全面掌握所有视频信息。
8.优选的,所述的监测单元还包括有搭载有检测传感器的无人机,将在空中采集的传感信号无线发送至上位机,所述的无人机与工厂内的报警器和音频传输设备连接,通知
人员撤离。
9.优选的,所述的应急救援单元包括,事故定位模块,根据监控单元的触发器的信号源位置,gis端更新获取事故发生位置,并上传到数据库;预测分析模块,根据数据库内已建立的事故数据分析模型,对发生的事故选择相应的事故数据分析模型进行分析,预测事故的发展趋势、危害范围和危害程度,结合数据库内保存的现场的救援力量,确定初步事故救援方案,并预测可能出现的意外情况,制定意外状况的应急对策;应急救援模块,根据预测分析模块分析出的事故影响情况,作出周边分析、疏散分析和救援分析,给出救援决策;路径分析模块,查找救援人员所在位置和事故发生位置之间的最短路径。
10.优选的,所述的应急救援模块中,在进行周边分析时,根据预测分析模块给出的结果,确定事故影响范围内受影响的聚集人群以及受影响范围内的重大危险源,判断重大危险源是否会受事故影响产生二次危害。
11.优选的,所述的应急救援模块中,在进行疏散分析时,根据周边分析的结果,对周边分析的每个结果执行缓冲区分析,查找在安全区内的距其最近的疏散场所,查找事故影响范围外可进行人群疏散的目的地,帮助救援人员查找事故区内距离疏散地最近的救援场所。
12.优选的,所述的应急救援模块中,在进行救援分析时,查找事故影响区外最近的救援队伍,并发出联合救援信号。
13.优选的,所述的应急系统还包括有对工厂内危险气体泄露处理的收集单元,所述的收集单元包括依次连接的泡沫吸收塔、喷雾净化塔、脱水除雾塔和负压风机,所述的泡沫吸收塔的入口处连接有柔性通罩,所述的泡沫吸收塔的底部填充有填料层,所述柔性通罩的端部伸入填料层,危险气体在负压风机的作用下通过柔性通罩进入泡沫吸收塔内,在填料层内形成鼓泡层,未被吸收的危险气体通过泡沫吸收塔顶部的出气口进入喷雾净化塔内。
14.优选的,所述的填料层采用金属丝网波纹填料,所述喷雾净化塔的内部顶端连接有雾化喷枪,所述喷雾净化塔的顶端管道连接至泡沫吸收塔所述的脱水除雾塔的内部设有除雾器,实现气液分离。
15.优选的,所述的数据库包括有用于地图服务器的空间数据库和属性数据库以及面向应急救援应用业务的本地数据库,数据层负责向上位机提供数据库支持。
16.优选的,所述的应急系统还包括有疏散单元,所述的疏散单元根据疏散算法计算出可能的疏散方案,然后将计算出来的疏散方案数组保存起来,当有紧急情况发生时,调用生成的疏散方案,实现对节点动态、快速且准确的控制。
17.优选的,所述的疏散单元包括:疏散集结点模块,获取所有疏散集结点图层信息,并在该图层信息上所有集结点要素地址信息,提取所有落在疏散区域内的点要素,在gis图上显示相关信息;避难点排序模块,基于疏散算法,分别计算多个疏散集结点到多个应急避难点的最优路径,计算完成后在gis端可视化各个集结点到相应避难点的最优路径,同时显示各个疏散集结点到相应避
难点的路径长度信息及估算时间。
18.优选的,所述的疏散单元还包括控制器从机、控制器分机和智能指示灯,上位机通过总线和并行总线实现与控制器从机、分机和智能指示灯的级联,并且上位机实时接收监测单元的消防联动信号,一台上位机的主板通过总线与若干台控制器从机级联,每台控制器从机通过并行总线与若干台控制器分机级联,每台控制器分机又通过总线与若干台智能指示灯级联,从而达到监控主机实时监控多个智能指示灯的目的。
19.优选的,所述的疏散算法包括如下步骤:s1、使用栅格法创建工厂地图模型并初始化蚁群算法各参数;s2、使用dijstra算法生成初始次优路径,然后根据τ
ij
=c d
ij
,更新对应路径初始信息素含量,并根据事故情况对gis地图各点进行更新,其中c为常数,d
ij
为通过dijstra算法计算出的当前增加信息素含量的栅格矩阵;s3、结合蚁群算法,根据η
ij
=ε1/d
it
ε2e
cosθit
ε3d
im
,更新蚁群算法的启发函数;其中d
it
为当前节点与目标终点的距离,θ
it
为行进方向与终点方向夹角,d
im
为节点与事故中心的距离,ε1、ε2和ε3为各因素的调节系数,根据路径情况适当取值;使得蚂蚁在搜寻时目标点对其吸引力更大,并通过计算行进方向与目标方向夹角使得蚂蚁在搜索路径时方向感更强,提高了算法的搜索速度,同时可与火灾中心保持一段安全距离,保证了逃生人员的安全;s4、根据p
ij
k=[τ
ij
(t)]
α
·
[η
ij
(t)]
β
/{∑[τ
is
(t)]
α
·
[η
is
(t)]
β
·
γb},(j∈allowedm,s∈allowedk),计算转移概率确定下一行走节点;其中τ
ij
(t)为t时刻从当前节点i到下一节点j路径上信息素的含量,η
ij
(t)为s4中η
ij
的启发函数,α为信息素启发式因子,β为期望启发因子,allowedk为蚂蚁k下一步可以到达的所有节点集合,allowedm为蚂蚁下一步可以到达所有节点中含有u形陷阱的集合,b为u形陷阱中有害气体、高温及能见度低的区域和障碍物叠加在一起的个数,且4<b<9,γ为与b对应的调节系数;s5、判断所有蚂蚁是否到达终点,如果是则进行下一步,否则转到步骤s4;s6、根据ρ(t)=0.95ρ(t-1),ρ(t)≥ρ
min
,0.3≤ρ
min
≤0.5,调节信息素挥发系数,其中ρ为信息素挥发系数,根据公式τ
ij
(t n)=(1-ρ)
·
τ
ij
(t) ∑
k=1m
δτ
ijk
;δτ
ijk
1=ψ1l
min
q/l
k2
,(path
sheortest
);δτ
kij
2=ψ2q/l
k2
(path);δτ
kij
3=-ψ
3vijk
q/lk,(pathm);v
ijk
=ts ρ0 k
cs
ds,对全局信息素进行更新;其中为δτ
ijk
为蚂蚁k在本次迭代中留在路径ij上的信息素量,l
min
为截止到上一次迭代为止最短路径,lk为本次迭代中蚂蚁k到达终点的路径长度,path
sheortest
为本次迭代中路径长度为当前达到终点的最短路径,pathm为本次迭代中包含烟雾、高温、能见度低和人员密集区域的路径,path表示本地迭代中其余走到终点蚂蚁的路径,v
ijk
为本地迭代中蚂蚁k在路径ij上事故信息的综合指标,ψ1、ψ2、ψ3对应的调节系数根据具体情况进行调整,t为当前位置的环境温度,ρ0为当前位置有害气体的浓度,kc为当前位置能见度参数,d为当前位置的人员密度,s为影响因素对应的等级;s7、判断当前是否满足最大迭代次数,如果满足则输出最优路径,如果未满足则跳转到步骤s3。
[0020]
与现有技术相比,本发明的有益效果在于:
1、本发明提供的用于工厂安全生产的应急系统,通过监测单元对工厂内全面进行安全监测,消除安全隐患,当发生事故时,监测单元的报警器发出报警,上位机的应急救援单元根据对事故发生处的定位以及预测分析,为事故的救援提供决策以及为救援人员提供最优的赶往事故地的路径,在短时间内快速响应,减少损失。
[0021]
2、本发明提供的用于工厂安全生产的应急系统,当隐患事故事件将要发生时会提前触发传感信号触发编码器经过编码后传送至端口,上位机会通过经端口获取的触发事件并进过查验检测识别,从而根据计算机语言程序的预先设定启动相应的预案报警动作,并准确记录触发事故的时间、故障名称以及处警动作并备案。
[0022]
3、本发明提供的用于工厂安全生产的应急系统,结合移动gis的空间服务和gps定位服务,能够为救援工作人员提供地图查询、定位导航、事故点定位、周边救援设施分析、疏散分析、预测分析等功能。在安全生产事故发生时,救援指挥人员能够使用该系统高效地进行救援决策。
附图说明
[0023]
图1是本发明用于工厂安全生产的应急系统结构示意图。
[0024]
图2是本发明用于工厂安全生产的应急系统的监测单元示意图。
[0025]
图3是本发明用于工厂安全生产的应急系统的收集单元示意图。
[0026]
图4是本发明用于工厂安全生产的应急系统的疏散单元示意图。
具体实施方式
[0027]
下面结合附图对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0028]
实施例1结合图1和图2,用于工厂安全生产的应急系统,包括监测单元、应急救援单元和上位机,其中监测单元包括触发器、无线收发器和报警器,触发器将传感信号通过触发编码器经过编码后传送至端口组合,端口组合采用并口或串口,上位机将通过端口组合获取的触发事件进行查验检测识别,获取触发器的告警信息并启动报警器,根据上位机预先设定启动相应的预案报警动作,并记录触发事故的时间、故障名称以及处警动作并备案,其中触发器采用传感器,各类检测用的传感器分散于工厂内的事故易发位置,组成无线传感网络,将无线收发器应用在安全生产检测设备上,用于监测工厂内的温湿度、火灾、危险气体泄露以及生产线安全生产的情况,对生产线上的安全隐患进行监控排除,同时联动工厂内已设置的现有技术中的智能消防类设备,在第一时间对事故进行自动消防处理。
[0029]
具体的,在对火灾进行判断时,触发器采用红外线探测仪、红外线测距仪以及温度传感器,在对烟雾浓度进行判断时,采用烟雾传感器,在对气体进行分析时,采用有毒气体分析仪,以及对生产设备正常运行进行监控的相关接触开关类。
[0030]
所述的监测单元还包括有分散在工厂内各处的用于网络视频监控的摄像头,将摄像头的物理位置在gis地图中标注与关联,当发生异常情况时,根据事件的物理区域调取相
应的视频信息,实现视频监控,形成集中监控模式,全面掌握所有视频信息。
[0031]
所述的监测单元还包括有搭载有检测传感器的无人机,将在空中采集的传感信号无线发送至上位机,所述的无人机与工厂内的报警器和音频传输设备连接,通知人员撤离,无人机上装有超声波测距仪,自动探测飞行过程中与障碍物之间的距离,防止在自主飞行过程中发生碰撞,装有摄像头起到信息收集和传输作用,还装有气体检测仪,对事故现场内的有毒气体和物质进行检测和分析,还具有存储灭火阻燃球的传送口,当烟雾探测器探测到火情时,无人机根据信号到达着火点,定位火源开启消防灭火装置,将内部的阻燃球投放到火场中,阻燃球遇火爆炸,起到隔离空气灭火的作用,可有效的扑灭火灾。
[0032]
所述的应急系统还包括有应急救援单元,根据监测单元的传感信号,结合gis空间服务和gps定位服务,为救援工作者提供救援决策。
[0033]
所述的应急救援单元包括:事故定位模块,根据监控单元的触发器的信号源位置,gis端更新获取事故发生位置,并上传到数据库;预测分析模块,根据数据库内已建立的事故数据分析模型,对发生的事故选择相应的事故数据分析模型进行分析,预测事故的发展趋势、危害范围和危害程度,结合数据库内保存的现场的救援力量,确定初步事故救援方案,并预测可能出现的意外情况,制定意外状况的应急对策;应急救援模块,根据预测分析模块分析出的事故影响情况,作出周边分析、疏散分析和救援分析,给出救援决策;路径分析模块,查找救援人员所在位置和事故发生位置之间的最短路径,路径分析有三种类型:(1)直接查找两地间最短路径;(2)用最短路径查找连续多个点构成的线路,中间可添加路障点,即不能通过的路;(3)在地图上确定一个点,用缓冲区分析确定另外一个点。
[0034]
在进行周边分析时,根据预测分析模块给出的结果,确定事故影响范围内受影响的聚集人群以及受影响范围内的重大危险源,判断重大危险源是否会受事故影响产生二次危害。
[0035]
在进行疏散分析时,根据周边分析的结果,对周边分析的每个结果执行缓冲区分析,查找在安全区内的距其最近的疏散场所,查找事故影响范围外可进行人群疏散的目的地,帮助救援人员查找事故区内距离疏散地最近的救援场所。
[0036]
在进行救援分析时,查找事故影响区外最近的救援队伍,并发出联合救援信号。
[0037]
结合移动gis的空间服务和gps定位服务,能够为救援工作人员提供地图查询、定位导航、事故点定位、周边救援设施分析、疏散分析、预测分析等功能。在安全生产事故发生时,救援指挥人员能够使用该系统高效地进行救援决策。
[0038]
实施例2在实施例1的基础上,结合图3,所述的应急系统还包括有对工厂内危险气体泄露处理的收集单元,所述的收集单元包括依次连接的泡沫吸收塔、喷雾净化塔、脱水除雾塔和负压风机,所述的泡沫吸收塔的入口处连接有柔性通罩,所述的泡沫吸收塔的底部填充有填料层,所述柔性通罩的端部伸入填料层,危险气体在负压风机的作用下通过柔性通罩进入泡沫吸收塔内,在填料层内形成鼓泡层,未被吸收的危险气体通过泡沫吸收塔顶部的出
气口进入喷雾净化塔内。
[0039]
所述的填料层采用金属丝网波纹填料,所述喷雾净化塔的内部顶端连接有雾化喷枪,所述喷雾净化塔的顶端管道连接至泡沫吸收塔所述的脱水除雾塔的内部设有除雾器,实现气液分离。
[0040]
当有害气体大量泄漏时与空气混合,如果遇到明火,甚至是静电引起的电火花,就会发生爆炸,导致大量人员伤亡中毒,经低温等离子体技术处理的污染物分子部分分解,此时气体中的组成部分有未分解的污染物、分解后的小分子物质、放电产生的具有高度反应活性的电子、原子、分子、自由基和臭氧等等,气体成分复杂,为了进一步净化,采用活性炭对尾气进行吸收,使尾气达到排放标准。
[0041]
实施例3所述的应急系统还包括有疏散单元,所述的疏散单元根据疏散算法计算出可能的疏散方案,然后将计算出来的疏散方案数组保存起来,当有紧急情况发生时,调用生成的疏散方案,实现对节点动态、快速且准确的控制。
[0042]
所述的疏散单元包括:疏散集结点模块,获取所有疏散集结点图层信息,并在该图层信息上所有集结点要素地址信息,提取所有落在疏散区域内的点要素,在gis图上显示相关信息;避难点排序模块,基于疏散算法,分别计算多个疏散集结点到多个应急避难点的最优路径,计算完成后在gis端可视化各个集结点到相应避难点的最优路径,同时显示各个疏散集结点到相应避难点的路径长度信息及估算时间。
[0043]
结合图4,所述的疏散单元还包括控制器从机、控制器分机和智能指示灯,上位机通过总线和并行总线实现与控制器从机、分机和智能指示灯的级联,并且上位机实时接收监测单元的消防联动信号,一台上位机的主板通过总线与若干台控制器从机级联,每台控制器从机通过并行总线与若干台控制器分机级联,每台控制器分机又通过总线与若干台智能指示灯级联,从而达到监控主机实时监控多个智能指示灯的目的。
[0044]
所述的疏散单元分为四个层次,上位机、控制器从机、控制器分机和智能指示灯,上位机通过总线和并行总线实现与控制器从机、分机和智能指示灯的级联,并且上位机实时接收监测单元的消防联动信号,一台上位机的主板通过总线与若干台控制器从机级联,每台控制器从机通过并行总线与若干台控制器分机级联,而每台控制器分机又通过总线与若干台智能指示灯级联,从而达到监控主机实时监控多个智能指示灯的目的,结合疏散算法,在系统给出最优路径后,上位机控制最优路径上的智能指示灯依次亮起,为人员提供最优的撤离路线。
[0045]
所述的疏散算法包括如下步骤:s1、使用栅格法创建工厂地图模型并初始化蚁群算法各参数;s2、使用dijstra算法生成初始次优路径,然后根据τ
ij
=c d
ij
,更新对应路径初始信息素含量,并根据事故情况对gis地图各点进行更新,其中c为常数,d
ij
为通过dijstra算法计算出的当前增加信息素含量的栅格矩阵;s3、结合蚁群算法,根据η
ij
=ε1/d
it
ε2e
cosθit
ε3d
im
,更新蚁群算法的启发函数;其中d
it
为当前节点与目标终点的距离,θ
it
为行进方向与终点方向夹角,d
im
为节点与事故中心的距离,ε1、ε2和ε3为各因素的调节系数,根据路径情况适当取值;使得蚂蚁在搜寻时目标点
对其吸引力更大,并通过计算行进方向与目标方向夹角使得蚂蚁在搜索路径时方向感更强,提高了算法的搜索速度,同时可与火灾中心保持一段安全距离,保证了逃生人员的安全;s4、根据p
ij
k=[τ
ij
(t)]
α
·
[η
ij
(t)]
β
/{∑[τ
is
(t)]
α
·
[η
is
(t)]
β
·
γb},(j∈allowedm,s∈allowedk),计算转移概率确定下一行走节点;其中τ
ij
(t)为t时刻从当前节点i到下一节点j路径上信息素的含量,η
ij
(t)为s4中η
ij
的启发函数,α为信息素启发式因子,β为期望启发因子,allowedk为蚂蚁k下一步可以到达的所有节点集合,allowedm为蚂蚁下一步可以到达所有节点中含有u形陷阱的集合,b为u形陷阱中有害气体、高温及能见度低的区域和障碍物叠加在一起的个数,且4<b<9,γ为与b对应的调节系数;s5、判断所有蚂蚁是否到达终点,如果是则进行下一步,否则转到步骤s4;s6、根据ρ(t)=0.95ρ(t-1),ρ(t)≥ρ
min
,0.3≤ρ
min
≤0.5,调节信息素挥发系数,其中ρ为信息素挥发系数,根据公式τ
ij
(t n)=(1-ρ)
·
τ
ij
(t) ∑
k=1m
δτ
ijk
;δτ
ijk
1=ψ1l
min
q/l
k2
,(path
sheortest
);δτ
kij
2=ψ2q/l
k2
(path);δτ
kij
3=-ψ
3vijk
q/lk,(pathm);v
ijk
=ts ρ0 k
cs
ds,对全局信息素进行更新;其中为δτ
ijk
为蚂蚁k在本次迭代中留在路径ij上的信息素量,l
min
为截止到上一次迭代为止最短路径,lk为本次迭代中蚂蚁k到达终点的路径长度,path
sheortest
为本次迭代中路径长度为当前达到终点的最短路径,pathm为本次迭代中包含烟雾、高温、能见度低和人员密集区域的路径,path表示本地迭代中其余走到终点蚂蚁的路径,v
ijk
为本地迭代中蚂蚁k在路径ij上事故信息的综合指标,ψ1、ψ2、ψ3对应的调节系数根据具体情况进行调整,t为当前位置的环境温度,ρ0为当前位置有害气体的浓度,kc为当前位置能见度参数,d为当前位置的人员密度,s为影响因素对应的等级;s7、判断当前是否满足最大迭代次数,如果满足则输出最优路径,如果未满足则跳转到步骤s3。
[0046]
过改进蚁群算法初始信息素分布、启发函数、转移概率、信息素挥发系数和更新规则,提高了算法全局搜索能力和搜索成功率,加快了收敛速度,增强了算法稳定性,提升了最优路径质量,同时可结合事故实时信息,避开事故影响区域,在保证人员安全的前提下,提高了人员的疏散效率。
[0047]
以火灾为例,当监测单元检测到有火灾信号输入时,应急救援单元立刻对火灾信号地点进行判断,即判断火警号,然后选择疏散单元生成的疏散方案,将对应的疏散方案数组通过通信系统打包发送出去,从而实现对节点的智能疏散控制。
[0048]
以上仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的保护范围内所做的任何修改,等同替换等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
