[0011][0012]
其中ir,ii分别为传输线路电流的实部和虚部;k1,k2分别是电网电压vg与线路阻抗z1比值的实部和虚部;ε为关键负载电压参考值v
c-ref
与线路阻抗模值|z1|的比值,满足:
[0013][0014]
步骤3、确定传输线路电流幅值i
1m
的表达式:
[0015][0016]
其中ir,ii分别为传输线路电流的实部和虚部;
[0017]
步骤4、根据检测电网电压信号vg、线路阻抗、以及步骤2和3中的关系式和表达式,确定传输线路电流的参考值i
1m-ref
:
[0018]
(1)当电网电压模值|vg|小于关键负载电压参考值v
c-ref
时:
[0019][0020][0021]
此时传输线路电流幅值i
1m
设置为:
[0022][0023]
(2)当电网电压模值|vg|大于关键负载电压参考值v
c-ref
时:
[0024][0025]
此时传输线路电流幅值i
1m
设置为:
[0026][0027]
步骤5、确定电力弹簧输出电压的幅值参考值v
es-ref
和相角参考值θ
es-ref
:
[0028][0029][0030]
其中v
es-ref
是将步骤4中的传输线路电流的参考值i
1-ref
代入下式:
[0031][0032]
其中:
[0033]
[0034][0035]
得到的关系得到的;v
es-refr
和v
es-refi
分别为v
es-ref
的实部和虚部;
[0036]
步骤6、将电力弹簧输出电压的相角参考值θ
es-ref
,通过sin函数信号发生器生成正弦信号,并将电力弹簧输出电压的幅值参考值与正弦信号相乘得到最终的电力弹簧输出电压正弦波:
[0037][0038]
其中v
ref
为电力弹簧输出电压正弦波;
[0039]
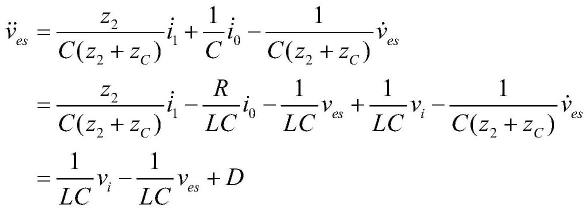
步骤7、将步骤6中电力弹簧输出电压正弦波与电力弹簧实际输出电压正弦波的误差,进行滑模控制控制,由步骤1建模可知:
[0040][0041]
其中d代表为参数摄动和电磁干扰及未知干扰之和;
[0042]
定义系统的误差变量为e,其表达式为:
[0043]
e=v
ref-v
es
[0044]
其中v
es
为电力弹簧输出电压,对其进行求导以后得到误差变量的一阶导数:
[0045][0046]
考虑最终使跟踪误差e收敛到零,将滑模变量s定义为:
[0047][0048]
其中λ(λ>0)为常数,对滑模变量求导后得到一阶导数为:
[0049][0050][0051]
步骤8、单相电力弹簧系统滑模变结构控制器采用李雅普诺夫直接法,选取李雅普诺夫函数:
[0052][0053]
对其进行求导得:
[0054][0055]
得到滑模变结构控制器表达式为:
[0056][0057]
式中,η为常数并且大于零,sign(s)为符号函数,有:
[0058][0059]
为验证控制器设计的合理性,得:
[0060][0061]
为保证收敛,需能够使η≥|d|,当时,s≡0,根据李雅普诺夫原理,闭环系统渐进稳定,在一定时间内滑模变量s收敛于滑模面s=0,闭环动态误差也会逐渐减小,限制在滑模面,逐渐收敛于0,并且收敛速度取决于参数η的大小。
[0062]
本发明与现有技术相比,其显著优点为:本发明在稳定关键负载电压的前提下,能够降低外界干扰,快速实现对关键负载电压稳定的目的。
附图说明
[0063]
图1为基于滑模控制的电力弹簧控制框图。
[0064]
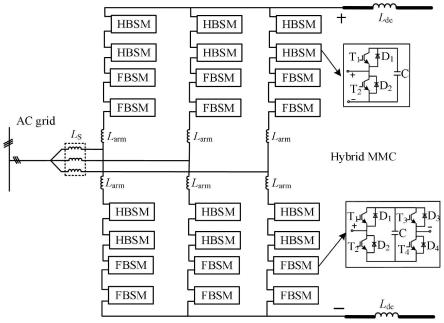
图2为电力弹簧应用系统拓扑图。
[0065]
图3为本发明控制方法下的关键负载电压的有效值与未引入es时关键负载电压的实际有效值波形。
具体实施方式
[0066]
下面结合附图和具体实施例,进一步说明本发明方案。
[0067]
如图1所示,本发明基于滑模控制的电力弹簧控制方法,包括如下步骤:
[0068]
步骤1、根据图2所示电力弹簧的电路结构图,建立电力弹簧的数学模型,该模型为:
[0069][0070]
其中:
[0071]
其中vg是电网电压;v
es
是电力弹簧输出电压;l1是传输线路等效电感;r1是传输线路等效电阻;z1是传输线路等效阻抗;zc是关键负载电阻;z2是非关键负载阻值;c是交流测滤波电容,l是交流测滤波电感;vi是逆变器交流侧输出电压;vc是电力弹簧关键负载电压;i0是电感电流;i1是传输线路电流;i2是非关键负载电流;i3是关键负载电流。
[0072]
步骤2、确定在关键负载侧电压vc达到参考值v
c-ref
时传输线路电流i1满足关系式:
[0073]
(i
r-k1)2 (i
i-k2)2=ε2[0074][0075][0076]
其中ir,ii分别为传输线路电流的实部和虚部;k1,k2分别是电网电压vg与线路阻抗z1比值的实部和虚部;ε为关键负载电压参考值v
c-ref
与线路阻抗模值|z1|的比值,满足:
[0077][0078]
步骤3、确定传输线路电流幅值i
1m
的表达式:
[0079][0080]
其中ir,ii分别为传输线路电流的实部和虚部;
[0081]
步骤4、根据检测电网电压信号vg、线路阻抗、以及步骤2和3中表达式,确定传输线路电流的参考值i
1m-ref
:
[0082]
(1)当电网电压模值|vg|小于关键负载电压参考值v
c-ref
时:
[0083][0084][0085]
此时传输线路电流幅值i
1m
设置为:
[0086][0087]
(2)当电网电压模值|vg|大于关键负载电压参考值v
c-ref
时:
[0088][0089]
此时传输线路电流幅值i
1m
设置为:
[0090][0091]
步骤5、确定电力弹簧输出电压的幅值参考值v
es-ref
和相角参考值θ
es-ref
:
[0092]
[0093][0094]
其中v
es-ref
是将步骤4中的传输线路电流的参考值i
1-ref
代入下式:
[0095][0096]
其中:
[0097][0098][0099]
得到的关系得到的;v
es-refr
和v
es-refi
分别为v
es-ref
的实部和虚部。
[0100]
步骤6、将电力弹簧输出电压的相角参考值θ
es-ref
,通过sin函数信号发生器生成正弦信号,并将电力弹簧输出电压的幅值参考值与正弦信号相乘得到最终的电力弹簧输出电压正弦波:
[0101][0102]
其中v
ref
为电力弹簧输出电压正弦波;
[0103]
步骤7、将步骤6中电力弹簧输出电压正弦波与电力弹簧实际输出电压正弦波的误差,进行滑模控制控制,由步骤1建模可知:
[0104][0105]
其中d代表为参数摄动和电磁干扰及未知干扰之和。
[0106]
定义系统的误差变量为e,其表达式为:
[0107]
e=v
ref-v
es
[0108]
其中v
es
为电力弹簧输出电压,对其进行求导以后得到误差变量的一阶导数:
[0109][0110]
考虑最终使跟踪误差e收敛到零,可将滑模变量s定义为:
[0111][0112]
其中λ(λ>0)为常数,对滑模变量求导后得到一阶导数为:
[0113][0114][0115]
上述完成了滑模控制器滑模面的选取,接下来根据滑模面推导变结构控制器的具
体表达式。
[0116]
步骤8、为了验证滑模控制单相电力弹簧系统控制系统的稳定性,要选择适当的李雅普诺夫能量函数,通过设计单相电力弹簧系统滑模变结构控制器,保证能量函数是收敛的即可证明系统是稳定的。本文的单相电力弹簧系统滑模变结构控制器采用李雅普诺夫直接法,选取的李雅普诺夫函数:
[0117][0118]
对其进行求导可得:
[0119][0120]
得到滑模变结构控制器表达式为:
[0121][0122]
式中,η为常数并且大于零,sign(s)为符号函数,有:
[0123][0124]
为验证控制器设计的合理性,得:
[0125][0126]
为保证收敛,需要可以使η≥|d|,也就是需要η满足大于等于系统干扰之和绝对值的最大值。当时,s≡0,根据李雅普诺夫原理,闭环系统渐进稳定,在一定时间内滑模变量s收敛于滑模面s=0,闭环动态误差也会逐渐减小,限制在滑模面,逐渐收敛于0,并且收敛速度取决于参数η的大小。
[0127]
通过上述的理论分析可知,本发明设计的滑模变结构控制器的设计是合理、正确性,为后面的仿真实验分析提供了理论依据。
[0128]
实施例
[0129]
为了验证本发明方案的有效性,在matlab/simulink搭建仿真模型,采用离散时间、固定步长的仿真模式进行仿真实验。
[0130]
采样时间为5e-5s,仿真中采用的元器件参数如表1所示。
[0131]
表1仿真元器件参数
[0132][0133]
本发明提出的传输线路电流和关键负载电压补偿电力弹簧控制方法,与传统的电力弹簧控制方法相比,当电网侧电压波动时,采用本发明提出的控制方法,当可再生能源系统注入电网有功功率低于工况,使电网电压低于220v,我们将电网电压设置为210v,在此状态下进行仿真实验验证其支撑作用,得到在电力弹簧作用下关键负载电压有效值波形,逐渐到达220v参考电压值。
[0134]
采用本发明提出基于传输线路电流和关键负载电压补偿电力弹簧控制方法,能够保证关键负载侧电压稳定至参考值,实现电力系统的稳定。
[0135]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。