技术特征:
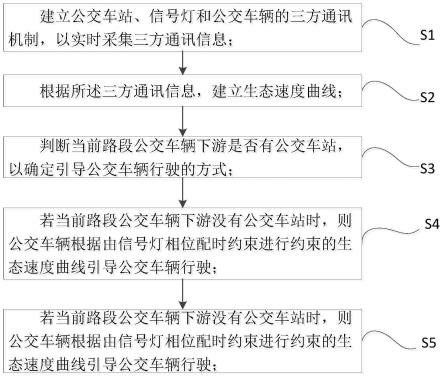
1.一种智能网联环境下的公交车生态迫近引导方法,其特征在于,包括如下步骤:s1:建立公交车站、信号灯和公交车辆的三方通讯机制,以实时采集三方通讯信息;所述三方通讯信息包括:信号灯相位配时、公交行车时刻表、驻站时间、所述公交车辆的上游公交车辆的位置、所述公交车辆的下游公交车辆的位置、路段长度信息;所述路段长度信息包括公交车站与下游信号灯之间的路段长度、上游信号灯到公交车站之间的路段长度和两个相邻信号灯之间的路段长度;s2:根据所述三方通讯信息,建立生态速度曲线;s3:判断当前路段公交车辆下游是否有公交车站,以确定引导公交车辆行驶的方式;s4:若当前路段公交车辆下游没有公交车站时,则公交车辆根据由信号灯相位配时约束进行约束的生态速度曲线引导公交车辆行驶;s5:若所述公交车辆下游有公交车站时,则当公交车辆到达公交车站完成服务时,公交车辆根据由公交驻站时间约束进行约束的生态速度曲线引导公交车辆行驶。2.根据权利要求1所述的一种智能网联环境下的公交车生态迫近引导方法,其特征在于,所述生态速度曲线的函数为:式中,j为优化目标函数,t0为初始时刻,t
s
为到达公交车站的时刻;n为公交车辆的编号,v
n
(t)表示t时刻公交车辆n的行驶速度,u
n
(t)为系统控制变量,具体为t时刻公交车辆n的行驶加速度;ω1为能源消耗的权重,ω2为加速度波动的权重,δu
n
(t)表示公交车辆n的加速度的波动,为公交车辆n在t时刻的能源消耗率;式中,α0表示公交车辆在公交车辆在怠速状态下的能源消耗系数,α1表示公交车辆在巡航状态下的能源消耗系数,α2表示公交车辆在加速状态下的能源消耗系数;g为重力加速度,m为公交车总质量,g为道路坡度;b1表示公交车辆在怠速状态下的阻力;b2表示公交车辆在巡航状态下的阻力。3.根据权利要求2所述的一种智能网联环境下的公交车生态迫近引导方法,其特征在于,所述生态速度曲线的函数需要满足的条件有物理约束条件和跟车距离约束条件;所述物理约束条件为:式中,v
max
为公交车辆最大行驶速度;v
max
=min{v
eco
,v
lim
}
ꢀꢀꢀꢀ
(4)式中,v
lim
为道路限制速度,v
eco
为以能源消耗最小为目标的生态巡航速度;
式中,为公交车辆在t时刻的巡航能耗;d为路段长度;为公交车辆在t时刻的巡航能耗;d为路段长度;为公交车辆在t时刻的巡航能耗;d为路段长度;式中,u
min
公交车辆行驶的最小加速度;u
max
为公交车辆行驶的最大加速度;k
n
(t)为公交车辆的跃度;k
min
跃度的最小值;k
max
为跃度的最大值;所述跟车距离约束条件如下:所述跟车距离约束条件如下:式中,x
n-1
(t)表示t时刻所述公交车辆的下游公交车辆的位置,x
n 1
(t)表示t时刻所述公交车辆的上游公交车辆的位置;τ
min
为跟车过程中的时间;d
min
为跟车过程中的位置偏移量;x
n
(t τ
min
)表示t τ
min
时刻公交车辆n的位置;x
n
(t-τ
min
)表示t-τ
min
时刻公交车辆n的位置。4.根据权利要求3所述的一种智能网联环境下的公交车生态迫近引导方法,其特征在于,所述s4中的信号灯相位配时约束如下:式中,t
s
为公交车辆到达交叉口的时间;t
d
为结束公交服务后在公交车站处的离站时间;t
r
为剩余绿灯时间;t
r
为一个周期内的红灯时间;t为信号灯整个周期的时间;t
g
为剩余红灯时间;t
g
一个周期内的绿灯时间。5.根据权利要求4所述的一种智能网联环境下的公交车生态迫近引导方法,其特征在于,所述s5中,公交驻站时间约束条件如下:式中,t
d,e
为避免公交车辆在交叉口处的停车等待而引入驻站时间后的离站时间;t
i,n
为在公交车站i处公交车辆规划的离站时间;为在当前信号灯为绿灯时的驻站时间;为在当前信号灯为红灯时的驻站时间;为在当前信号灯为红灯时的驻站时间;t
min
=(x
s-x
d
)/v
max
ꢀꢀꢀꢀ
(15)
t
max
=(x
s-x
d
)/v
cr
ꢀꢀꢀꢀ
(16)式中,t
min
为公交车辆从公交车站出发以最大速度行驶至交叉口的时间;t
max
为从公交车站出发以爬行速度行驶至交叉口的时间;v
max
为公交车辆最大行驶速度;v
cr
为公交车辆爬行速度;x
s
为公交车站的位置;x
d
为下游交叉口的位置。6.根据权利要求5所述的一种智能网联环境下的公交车生态迫近引导方法,其特征在于,所述步骤s5前还包括根据车头时距约束判断公交车辆是否能够稳定运营:若所述公交车辆能够稳定运营,则根据公交驻站时间约束引导公交车辆行驶;若公交车辆不能够稳定运营,则根据车头时距约束引导公交车辆行驶。7.根据权利要求6所述的一种智能网联环境下的公交车生态迫近引导方法,其特征在于,所述车头时距约束条件为:t
d
=min(t
d,e
,t
d,s
)
ꢀꢀꢀꢀ
(17)式中,t
d,s
为考虑公交运营稳定性的公交车辆离站时间;a
i,n
为公交车辆n到达站点i的时间;a
i,n-1
为公交车辆n-1到达站点i的时间;tt
i,i-1
为公交车辆在公交车站i与i 1间的行驶时间;a
i-1,n 1
tt
i,i-1-a
i,n
表示公交车辆n与公交车辆的上游公交车辆间的车头时距;a
i,n-a
i,n-1
表示公交车辆n与公交车辆的下游公交车辆间的车头时距。
技术总结
本发明公开了一种智能网联环境下的公交车生态迫近引导方法,包括:S1:建立三方通讯机制;S2:根据所述三方通讯信息,建立生态速度曲线;S3:判断当前路段公交车辆下游是否有公交车站;S4:若没有公交车站时,则根据由信号灯相位配时约束进行约束的生态速度曲线引导公交车辆行驶;S5:若有公交车站时,则当公交车辆到达公交车站完成服务时,根据由公交驻站时间约束进行约束的生态速度曲线引导公交车辆行驶。本发明的方法根据生态速度曲线对公交车辆进行生态迫近引导;解决了公交行驶过程中的高能耗驾驶行为,有效提升系统能源使用效率。同时解决现有面向社会车辆的生态迫近方法难以直接应用于公交系统的问题。接应用于公交系统的问题。接应用于公交系统的问题。
技术研发人员:李欣 徐伟汉 王天奇 袁昀 胡笳
受保护的技术使用者:重庆尔玉科技有限责任公司
技术研发日:2022.05.27
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。