1.本发明属于纺织机器技术领域,具体涉及一种旋转型三维编织机编织底盘的设计方法。
背景技术:
2.如果将三维编织机携纱器运动的平面设为xoy坐标系,编织轴向则可以设为oz。在编织轴向,做速度为v(t)的直线运动,通过xoy平面的锭子运动,形成编织结构。所以三维编织机的设计主要就是对于xoy平面上,携纱器运动路径的设计,即对底盘的设计。携纱器在底盘上的运动分为直线和圆周运动,直线运动如四步法、二步法三维编织机,圆周运动如tsuzuki 三维编织机。
3.相比直线运动,圆周运动的旋转型三维编织机更容易自动化,最早的编织机是采用拨盘与轨道结合的方式,轨道固定使得一种机器只能编织一种结构;hozerg编织机在轨道上加上离合装置,但仅稍微丰富了编织结构;tsuzuki旋转型三维编织机采用了独立电机控制角轮,大大提升了编织的灵活性,但是面临着相邻角轮不能同时运动;3tex旋转型三维编织机在角轮之间加入了离合装置,解决了相邻角轮不能同时转动的问题,但携纱量不高难以解决;六角形编织机对携纱量有一定地提高,但由于六角形的几何结构,使得编织种类受限,为了解决这个问题,第二代六角形编织加入了转换装置,但是其在携纱量与编织花型上都存在明显不足;总体来说,目前旋转型三维编织机种类还很少,能够独立控制角轮设备只有四种,因此设备种类还有很大地设计空间。
4.因此,研究一种旋转型三维编织机编织底盘的设计方法,丰富现有编织机种类,以解决现有技术中携纱量不足与编织花型单一的问题具有十分重要的意义。
技术实现要素:
5.本发明的目的是解决现有技术中存在的问题,提供一种旋转型三维编织机编织底盘的设计方法。
6.为了达到上述目的,本发明采用的技术方案如下:
7.旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个尺寸相同的n切口圆组成;
8.n为2、3或8;
9.n切口圆的形成过程为:在圆a的周围设置n个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n切口圆;
10.形状a是基于n切口圆的外接圆半径r、相邻两个n切口圆的圆心距d、n切口圆的切割角β得到的,切割角β为线段a1a0与线段a2a0的夹角;
11.r为设定值,r》0;
12.d和β为计算值,如果存在正偶数p使得pθ=2π,θ为n切口圆的内角(n切口圆在底盘中排列,所占面积可以等效为一个正n边形,这个内角θ便是该正n边形的内角),θ=π
×
(n-2)/n,则d和β的计算公式如下:
13.β≤2π/n;
14.d=2
×r×
cos(β/2);
15.r≤d
×
sin(π/n)。
16.反之,则d和β的计算公式如下:
17.β≤2π/n;
18.β≤π/2;
19.d=2
×r×
cos(β/2);
20.本发明还提供了另一种旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个n1切口圆和n2切口圆组成;
21.n1为3,n2为2;或者,n1为3,n2为4;或者,n1为3,n2为6;或者,n1为3,n2为8;或者,n1为4,n2为6;或者,n1为4,n2为8;或者,n1为6,n2为4;
22.n1或n2切口圆的形成过程为:在圆a的周围设置n1或n2个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b 与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n1或n2切口圆;
23.形状a是基于n1切口圆的外接圆半径r1、n2切口圆的外接圆半径r2、相邻两个n1切口圆与n2切口圆的圆心距d、n1切口圆的切割角β1和n2切口圆的切割角β2得到的,切割角β1或β2为线段a1a0与线段a2a0的夹角;
24.r1为设定值,r1》0;
25.r2、d、β1、β2为计算值,如果存在正偶数p和q使得pθn qθm=2π,θn为n1切口圆的内角,θn=π
×
(n
1-2)/n1,θm为n2切口圆的内角,θm=π
×
(n
2-2)/n2,或者n1=2,或者n2=2, 则r2、d、β1、β2的计算公式如下:
26.β1≤2π/n1;
27.β2≤2π/n2;
28.r2=r1×
sin(β1/2)/sin(β2/2);
29.d=r1×
cos(β1/2) r2×
cos(β2/2);
[0030][0031][0032]
反之,则r2、d、β1、β2的计算公式如下:
[0033]
β1 β2≤π;
[0034]
β1≤2π/n1;
[0035]
β2≤2π/n2;
[0036]
r2=r1×
sin(β1/2)/sin(β2/2);
[0037]
d=r1×
cos(β1/2) r2×
cos(β2/2);
[0038][0039]
有益效果
[0040]
本发明的旋转型三维编织机编织底盘的设计方法,通过提出切口圆内角的概念实现致密结构与空隙结构的区分,将底盘上所有切口圆的特征表征为r1、r2、d、β1、β2五个参数(或 r、d、β三个参数),建立了这几个参数之间的关系,实现了由部分参数确定剩余参数,极大地方便了后续对不同型号编织机底盘的参数化设计。
附图说明
[0041]
图1为参数r1、r2、d、β1、β2的标注图;
[0042]
图2和图3为3切口圆和2切口圆的组合设计图;
[0043]
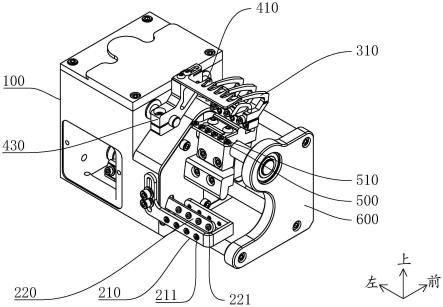
图4为实施例1的旋转型三维编织机编织底盘示意图;
[0044]
图5为实施例1的携纱器的运动路径示意图;
[0045]
图6为实施例1的编织件的空间结构示意图;
[0046]
图7为实施例1的编织件的空间结构示意图;
[0047]
图8和图9为3切口圆和4切口圆的组合设计图;
[0048]
图10和图11为3切口圆和6切口圆的组合设计图;
[0049]
图12和图13为3切口圆和8切口圆的组合设计图;
[0050]
图14和图15为4切口圆和6切口圆的组合设计图;
[0051]
图16和图17为4切口圆和8切口圆的组合设计图;
[0052]
图18和图19为6切口圆和4切口圆的组合设计图;
[0053]
图20和图21为3切口圆的组合设计图;
[0054]
图22为实施例8的旋转型三维编织机编织底盘示意图;
[0055]
图23为实施例8的携纱器的运动路径示意图;
[0056]
图24为实施例8的编织件的空间结构示意图;
[0057]
图25为实施例8的编织件的空间结构示意图;
[0058]
图26和图27为2切口圆的组合设计图;
[0059]
图28和图29为8切口圆的组合设计图。
具体实施方式
[0060]
下面结合具体实施方式,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
[0061]
一种旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个尺寸相同的n切口圆组成;
[0062]
n为2、3或8;
[0063]
n切口圆的形成过程为:在圆a的周围设置n个尺寸相同且环绕圆a的中心圆周均布
的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n切口圆;
[0064]
形状a是基于n切口圆的外接圆半径r、相邻两个n切口圆的圆心距d、n切口圆的切割角β得到的,切割角β为线段a1a0与线段a2a0的夹角;
[0065]
r为设定值,r》0;
[0066]
d和β为计算值,如果存在正偶数p使得pθ=2π,θ为n切口圆的内角,θ=π
×
(n-2)/n,则d和β的计算公式如下:
[0067]
β≤2π/n;
[0068]
d=2
×r×
cos(β/2);
[0069]
r≤d
×
sin(π/n);
[0070]
反之,则d和β的计算公式如下:
[0071]
β≤2π/n;
[0072]
β≤π/2;
[0073]
d=2
×r×
cos(β/2)。
[0074]
另一种旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个n1切口圆和n2切口圆组成;
[0075]
n1为3,n2为2;或者,n1为3,n2为4;或者,n1为3,n2为6;或者,n1为3,n2为8;或者,n1为4,n2为6;或者,n1为4,n2为8;或者,n1为6,n2为4;
[0076]
n1或n2切口圆的形成过程为:在圆a的周围设置n1或n2个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b 与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n1或n2切口圆;
[0077]
形状a是基于n1切口圆的外接圆半径r1、n2切口圆的外接圆半径r2、相邻两个n1切口圆与n2切口圆的圆心距d、n1切口圆的切割角β1和n2切口圆的切割角β2得到的,切割角β1或β2为线段a1a0与线段a2a0的夹角;
[0078]
图1以n1为3、n2为2为例,对r1、r2、d、β1、β2所代表的含义进行了示意;
[0079]
r1为设定值,r1》0;
[0080]
r2、d、β1、β2为计算值,如果存在正偶数p和q使得pθn qθm=2π,θn为n1切口圆的内角,θn=π
×
(n
1-2)/n1,θm为n2切口圆的内角,θm=π
×
(n
2-2)/n2,或者n1=2,或者n2=2,则 r2、d、β1、β2的计算公式如下:
[0081]
β1≤2π/n1;
[0082]
β2≤2π/n2;
[0083]
r2=r1×
sin(0.5
×
β1)/sin(0.5
×
β2);
[0084]
d=r1×
cos(0.5
×
β1) r2×
cos(0.5
×
β2);
[0085][0086][0087]
反之,则r2、d、β1、β2的计算公式如下:
[0088]
β1 β2≤π;
[0089]
β1≤2π/n1;
[0090]
β2≤2π/n2;
[0091]
r2=r1×
sin(β1/2)/sin(β2/2);
[0092]
d=r1×
cos(β1/2) r2×
cos(β2/2);
[0093][0094]
由于生产需求的不同对于设计参数的要求可能有所差别,本发明为了保证编织时携纱器的位置尽可能大而能够放置更大的纱筒,所有实施例对于切割角在满足上述要求的取值范围中均求取最大值。
[0095]
实施例1
[0096]
旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个n1切口圆和n2切口圆组成;其中,n1为3,n2为2;
[0097]
n1或n2切口圆的形成过程为:在圆a的周围设置n1或n2个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b 与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n1或n2切口圆;
[0098]
形状a是基于n1切口圆的外接圆半径r1、n2切口圆的外接圆半径r2、相邻两个n1切口圆与n2切口圆的圆心距d、n1切口圆的切割角β1和n2切口圆的切割角β2得到的,切割角β1或β2为线段a1a0与线段a2a0的夹角;
[0099]
r1为设定值,本实施例中设定r1=r;
[0100]
r2、d、β1、β2为计算值;
[0101]
由于n2=2,因此r2、d、β1、β2的计算公式如下:
[0102]
β1≤2π/n1;
[0103]
β2≤2π/n2;
[0104]
r2=r1×
sin(β1/2)/sin(β2/2);
[0105]
d=r1×
cos(β1/2) r2×
cos(β2/2);
[0106][0107][0108]
计算结果为:r2=0.8653
×
r,d=1.03
×
r,β1=1.7604rad,β2=2.1987rad,rad即单位弧度;
[0109]
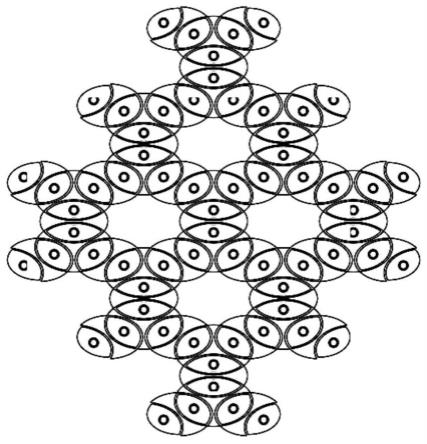
基于上述r1、r2、d、β1、β2得到的形状a如图2和图3所示。
[0110]
旋转型三维编织机编织底盘的最基本单元的运动方式是:两组切口圆交替运动,各位运动角度为各自圆心角(2π/n1、2π/n2)的整数倍。
[0111]
为了检验该旋转型三维编织机编织底盘的编织效果,本发明模拟了携纱器的运动路径以及编织件的空间结构,具体地,选取了两个相邻的3切口圆,以及周围的2切口圆,设定3 切口圆顺时针转动120
°
,2切口圆逆时针转动180
°
,两组切口圆交替转动,旋转型三维编织机编织底盘如图4所示,携纱器的运动路径如图5所示,编织件的空间结构如图6和图7所示。
[0112]
实施例2
[0113]
旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个n1切口圆和n2切口圆组成;其中,n1为3,n2为4;
[0114]
n1或n2切口圆的形成过程为:在圆a的周围设置n1或n2个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b 与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n1或n2切口圆;
[0115]
形状a是基于n1切口圆的外接圆半径r1、n2切口圆的外接圆半径r2、相邻两个n1切口圆与n2切口圆的圆心距d、n1切口圆的切割角β1和n2切口圆的切割角β2得到的,切割角β1或β2为线段a1a0与线段a2a0的夹角;
[0116]
r1为设定值,本实施例中设定r1=r;
[0117]
r2、d、β1、β2为计算值;
[0118]
由于不存在正偶数p和q使得pθn qθm=2π,θn为n1切口圆的内角,θn=π
×
(n
1-2)/n1,θm为n2切口圆的内角,θm=π
×
(n
2-2)/n2,因此r2、d、β1、β2的计算公式如下:
[0119]
β1 β2≤π;
[0120]
β1≤2π/n1;
[0121]
β2≤2π/n2;
[0122]
r2=r1×
sin(β1/2)/sin(β2/2);
[0123]
d=r1×
cos(β1/2) r2×
cos(β2/2);
[0124][0125]
计算结果为:d=2
×
r,β1=2π/3rad,β2=π/3rad;
[0126]
基于上述r1、r2、d、β1、β2得到的形状a如图8和图9所示。
[0127]
旋转型三维编织机编织底盘的最基本单元的运动方式是:两组切口圆交替运动,各位运动角度为各自圆心角(2π/n1、2π/n2)的整数倍。
[0128]
实施例3
[0129]
旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个n1切口圆和n2切口圆组成;其中,n1为3,n2为6;
[0130]
n1或n2切口圆的形成过程为:在圆a的周围设置n1或n2个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b 与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n1或n2切口圆;
[0131]
形状a是基于n1切口圆的外接圆半径r1、n2切口圆的外接圆半径r2、相邻两个n1切口圆与n2切口圆的圆心距d、n1切口圆的切割角β1和n2切口圆的切割角β2得到的,切割角β1或β2为线段a1a0与线段a2a0的夹角;
[0132]
r1为设定值,本实施例中设定r1=r;
[0133]
r2、d、β1、β2为计算值;
[0134]
由于存在正偶数p和q使得pθn qθm=2π,θn为n1切口圆的内角,θn=π
×
(n
1-2)/n1,θm为n2切口圆的内角,θm=π
×
(n
2-2)/n2,因此r2、d、β1、β2的计算公式如下:
[0135]
β1≤2π/n1;
[0136]
β2≤2π/n2;
[0137]
r2=r1×
sin(β1/2)/sin(β2/2);
[0138]
d=r1×
cos(β1/2) r2×
cos(β2/2);
[0139][0140][0141]
计算结果为:d=2
×
r,β1=2π/3rad,β2=π/3rad;
[0142]
基于上述r1、r2、d、β1、β2得到的形状a如图10和图11所示。
[0143]
旋转型三维编织机编织底盘的最基本单元的运动方式是:两组切口圆交替运动,各位运动角度为各自圆心角(2π/n1、2π/n2)的整数倍。
[0144]
实施例4
[0145]
旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个n1切口圆和n2切口圆组成;其中,n1为3,n2为8;
[0146]
n1或n2切口圆的形成过程为:在圆a的周围设置n1或n2个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b 与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n1或n2切口圆;
[0147]
形状a是基于n1切口圆的外接圆半径r1、n2切口圆的外接圆半径r2、相邻两个n1切口圆与n2切口圆的圆心距d、n1切口圆的切割角β1和n2切口圆的切割角β2得到的,切割角β1或β2为线段a1a0与线段a2a0的夹角;
[0148]
r1为设定值,本实施例中设定r1=r;
[0149]
r2、d、β1、β2为计算值;
[0150]
由于不存在正偶数p和q使得pθn qθm=2π,θn为n1切口圆的内角,θn=π
×
(n
1-2)/n1,θm为n2切口圆的内角,θm=π
×
(n
2-2)/n2,因此r2、d、β1、β2的计算公式如下:
[0151]
β1 β2≤π;
[0152]
β1≤2π/n1;
[0153]
β2≤2π/n2;
[0154]
r2=r1×
sin(β1/2)/sin(β2/2);
[0155]
d=r1×
cos(β1/2) r2×
cos(β2/2);
[0156][0157]
计算结果为:r2=2.2376
×
r,d=2.5838
×
r,β1=2.0561rad,β2=π/4rad;
[0158]
基于上述r1、r2、d、β1、β2得到的形状a如图12和图13所示。
[0159]
旋转型三维编织机编织底盘的最基本单元的运动方式是:两组切口圆交替运动,各位运动角度为各自圆心角(2π/n1、2π/n2)的整数倍。
[0160]
实施例5
[0161]
旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个n1切口圆和n2切口圆
组成;其中,n1为4,n2为6;
[0162]
n1或n2切口圆的形成过程为:在圆a的周围设置n1或n2个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b 与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n1或n2切口圆;
[0163]
形状a是基于n1切口圆的外接圆半径r1、n2切口圆的外接圆半径r2、相邻两个n1切口圆与n2切口圆的圆心距d、n1切口圆的切割角β1和n2切口圆的切割角β2得到的,切割角β1或β2为线段a1a0与线段a2a0的夹角;
[0164]
r1为设定值,本实施例中设定r1=r;
[0165]
r2、d、β1、β2为计算值;
[0166]
由于不存在正偶数p和q使得pθn qθm=2π,θn为n1切口圆的内角,θn=π
×
(n
1-2)/n1,θm为n2切口圆的内角,θm=π
×
(n
2-2)/n2,因此r2、d、β1、β2的计算公式如下:
[0167]
β1 β2≤π;
[0168]
β1≤2π/n1;
[0169]
β2≤2π/n2;
[0170]
r2=r1×
sin(β1/2)/sin(β2/2);
[0171]
d=r1×
cos(β1/2) r2×
cos(β2/2);
[0172][0173]
计算结果为:r2=1.3477
×
r,d=1.9061
×
r,β1=1.4789rad,β2=π/3rad;
[0174]
基于上述r1、r2、d、β1、β2得到的形状a如图14和图15所示。
[0175]
旋转型三维编织机编织底盘的最基本单元的运动方式是:两组切口圆交替运动,各位运动角度为各自圆心角(2π/n1、2π/n2)的整数倍。
[0176]
实施例6
[0177]
旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个n1切口圆和n2切口圆组成;其中,n1为4,n2为8;
[0178]
n1或n2切口圆的形成过程为:在圆a的周围设置n1或n2个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b 与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n1或n2切口圆;
[0179]
形状a是基于n1切口圆的外接圆半径r1、n2切口圆的外接圆半径r2、相邻两个n1切口圆与n2切口圆的圆心距d、n1切口圆的切割角β1和n2切口圆的切割角β2得到的,切割角β1或β2为线段a1a0与线段a2a0的夹角;
[0180]
r1为设定值,本实施例中设定r1=r;
[0181]
r2、d、β1、β2为计算值;
[0182]
由于不存在正偶数p和q使得pθn qθm=2π,θn为n1切口圆的内角,θn=π
×
(n
1-2)/n1,θm为n2切口圆的内角,θm=π
×
(n
2-2)/n2,因此r2、d、β1、β2的计算公式如下:
[0183]
β1 β2≤π;
[0184]
β1≤2π/n1;
[0185]
β2≤2π/n2;
[0186]
r2=r1×
sin(β1/2)/sin(β2/2);
[0187]
d=r1×
cos(β1/2) r2×
cos(β2/2);
[0188][0189]
计算结果为:r2=1.6077
×
r,d=2.2737
×
r,β1=1.3254rad,β2=π/4rad;
[0190]
基于上述r1、r2、d、β1、β2得到的形状a如图16和图17所示。
[0191]
旋转型三维编织机编织底盘的最基本单元的运动方式是:两组切口圆交替运动,各位运动角度为各自圆心角(2π/n1、2π/n2)的整数倍。
[0192]
实施例7
[0193]
旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个n1切口圆和n2切口圆组成;其中,n1为6,n2为4;
[0194]
n1或n2切口圆的形成过程为:在圆a的周围设置n1或n2个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b 与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n1或n2切口圆;
[0195]
形状a是基于n1切口圆的外接圆半径r1、n2切口圆的外接圆半径r2、相邻两个n1切口圆与n2切口圆的圆心距d、n1切口圆的切割角β1和n2切口圆的切割角β2得到的,切割角β1或β2为线段a1a0与线段a2a0的夹角;
[0196]
r1为设定值,本实施例中设定r1=r;
[0197]
r2、d、β1、β2为计算值;
[0198]
由于不存在正偶数p和q使得pθn qθm=2π,θn为n1切口圆的内角,θn=π
×
(n
1-2)/n1,θm为n2切口圆的内角,θm=π
×
(n
2-2)/n2,因此r2、d、β1、β2的计算公式如下:
[0199]
β1 β2≤π;
[0200]
β1≤2π/n1;
[0201]
β2≤2π/n2;
[0202]
r2=r1×
sin(β1/2)/sin(β2/2);
[0203]
d=r1×
cos(β1/2) r2×
cos(β2/2);
[0204][0205]
计算结果为:r2=0.6748
×
r,d=1.3560
×
r,β1=0.9948rad,β2=1.5708rad;
[0206]
基于上述r1、r2、d、β1、β2得到的形状a如图18和图19所示。
[0207]
旋转型三维编织机编织底盘的最基本单元的运动方式是:两组切口圆交替运动,各位运动角度为各自圆心角(2π/n1、2π/n2)的整数倍。
[0208]
实施例8
[0209]
一种旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个尺寸相同的n切口圆组成;n为3;
[0210]
n切口圆的形成过程为:在圆a的周围设置n个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n切口圆;
[0211]
形状a是基于n切口圆的外接圆半径r、相邻两个n切口圆的圆心距d、n切口圆的切割角β得到的,切割角β为线段a1a0与线段a2a0的夹角;
[0212]
r为设定值;
[0213]
d和β为计算值,由于存在正偶数p使得pθ=2π,θ为n切口圆的内角,θ=π
×
(n-2)/n,因此d和β的计算公式如下:
[0214]
β≤2π/n;
[0215]
d=2
×r×
cos(β/2);
[0216]
r≤d
×
sin(π/n)。
[0217]
计算结果为:d=1.1547
×
r,β=1.9106rad;
[0218]
基于上述r、d、β得到的形状a如图20和图21所示。
[0219]
旋转型三维编织机编织底盘的最基本单元的运动方式是:底盘中任一切口圆转动时,相邻的切口圆必须保持静止,据此将整个底盘上的切口圆分为两组,这两组中一组转动2π/3 的整数倍角度后,另一组反向转动2π/3的整数倍角度。
[0220]
为了检验该旋转型三维编织机编织底盘的编织效果,本发明模拟了携纱器的运动路径以及编织件的空间结构,具体地,选取了10个3切口圆,设定一组3切口圆顺时针转动2π/3,另一组3切口圆逆时针转动2π/3,两组切口圆交替转动,旋转型三维编织机编织底盘如图 22所示,携纱器的运动路径如图23所示,编织件的空间结构如图24和图25所示。
[0221]
实施例9
[0222]
一种旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个尺寸相同的n切口圆组成;n为2;
[0223]
n切口圆的形成过程为:在圆a的周围设置n个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n切口圆;
[0224]
形状a是基于n切口圆的外接圆半径r、相邻两个n切口圆的圆心距d、n切口圆的切割角β得到的,切割角β为线段a1a0与线段a2a0的夹角;
[0225]
r为设定值;
[0226]
d和β为计算值,由于不存在正偶数p使得pθ=2π,θ为n切口圆的内角,θ=π
×
(n-2)/n,因此d和β的计算公式如下:
[0227]
β≤2π/n;
[0228]
β≤π/2;
[0229]
d=2
×r×
cos(β/2);
[0230]
计算结果为:β=π/2rad;
[0231]
基于上述r、d、β得到的形状a如图26和图27所示。
[0232]
旋转型三维编织机编织底盘的最基本单元的运动方式是:底盘中任一切口圆转动时,相邻的切口圆必须保持静止,据此将整个底盘上的切口圆分为三组,图26中5个切口圆,中间切口圆一组,左右切口圆一组,上下切口圆一组,运动的基本方式是,中间切口圆转动π/2,上下切口圆反方向转动π,中间切口圆转动π/2,左右切口圆反方向转动π,完成一个循环。
[0233]
实施例10
[0234]
一种旋转型三维编织机编织底盘的设计方法,旋转型三维编织机编织底盘包括底盘、角轮和拨盘,角轮和拨盘组成的整体的俯视图记为形状a,形状a由多个尺寸相同的n切口圆组成;n为8;
[0235]
n切口圆的形成过程为:在圆a的周围设置n个尺寸相同且环绕圆a的中心圆周均布的圆b,圆b与圆a部分相交,交点记为a1和a2,圆a的圆心记为a0,不同的圆b与圆a相交的区域都不重叠,在圆a中去除其与圆b相交的部分后,剩余的形状即为n切口圆;
[0236]
形状a是基于n切口圆的外接圆半径r、相邻两个n切口圆的圆心距d、n切口圆的切割角β得到的,切割角β为线段a1a0与线段a2a0的夹角;
[0237]
r为设定值;
[0238]
d和β为计算值,由于不存在正偶数p使得pθ=2π,θ为n切口圆的内角,θ=π
×
(n-2)/n,因此d和β的计算公式如下:
[0239]
β≤2π/n;
[0240]
β≤π/2;
[0241]
d=2
×r×
cos(β/2);
[0242]
计算结果为:d=1.8478
×
r,β=π/4rad;
[0243]
基于上述r、d、β得到的形状a如图28和图29所示。
[0244]
旋转型三维编织机编织底盘的最基本单元的运动方式是:底盘中任一切口圆转动时,相邻的切口圆必须保持静止,据此将整个底盘上的切口圆分为两组,这两组中一组转动π/4的整数倍角度后,另一组反向转动π/4的整数倍角度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。