1.本发明涉及养殖工船养殖舱清洁技术领域,具体的涉及一种养殖舱舱壁海洋附着物自动清洁装置及清洁方法。
背景技术:
2.深远海水域具有渔业资源丰富、水源优质、水温适宜和远离陆源性污染与病害等显著优点,具备开展海上规模化养殖与物流加工补给的优良条件,是发展现代水产养殖业和海洋经济的新空间。
3.养殖工船就相当于一个浮动网箱,养殖工船不仅能深入到普通养殖网箱无法到达的深海水域,而且养殖工船的安全性要高很多。使用养殖工船进行鱼类养殖,能够大大提高鱼类产量,通过进一步优化船载养殖系统及工艺,不断完善深远海养殖工船装备研发与试验技术体系,不断地增强养殖工船的兼容性、可靠性和适渔性,最大限度规避风险,为后续智慧渔业大型养殖工船项目的稳步开展及现代养殖的机械化、智能化、信息化提供有力支撑。
4.养殖工船是发展深远海水域养殖工程的核心装备之一,具有较高的经济价值、生态价值和社会价值。对于一艘十万吨级的养殖工船来说,每个养殖舱的养殖水体深度可达15m,养成鱼可达100多吨,由于养殖工船需要长时间在海洋中养殖,在养殖过程中,容易生产海洋生物,如藻类和贝类等,贝类长时间生长,容易产生堆积影响水质,并在鱼类游动过程中对鱼体产生损坏,因此对于一直浸泡在海水中的养殖工船养殖舱舱壁的清理成为本领域技术人员亟需解决的技术问题。
5.在现有的技术中,本领域技术人员通过使用爬壁机器人对舱壁进行其管理,如专利cn209757470u公开了一种能够除去船舶附着海生物的机器人,包括爬壁机器人,爬壁机器人的一侧固定安装横板,横板顶面的一侧固定安装正反转的电动机,电动机的顶面开设横向槽,电动机的一侧设有横杆,横杆的一端与电动机的输出轴固定连接,横杆的中部设有第一圆盘,第一圆盘的顶面开设第一螺孔,横杆的另一端穿过第一螺孔,横杆的另一端带有外螺纹,横杆的另一端与第一螺孔通过螺纹配合连接,第一圆盘的一侧设有第二圆盘,第二圆盘的直径小于第一圆盘的直径,第二圆盘的一侧与横杆的另一端通过轴承固定连接。上述专利在养殖舱内使用时,产生的噪音会影响鱼类的生产,并且刮下来的贝类会漂浮在养殖舱的水中,会再次附着或者对鱼类造成伤害,降低鱼类的品相。
6.因此,本领域技术人员亟需一种对养殖舱内的贝类或藻类附着物清理方便,产生噪音小,且清理的贝类或藻类附着物不会二次进行附着在养殖舱壁上的附着物清理装置。
技术实现要素:
7.针对上述存在的问题,本技术的目的是:提供一种具有养殖舱舱壁附着物自清洁装置的养殖工船及清洁方法,节约资源,能够有效的对附着物进行清理,减低产生的噪音,降低清理装置运动对鱼类的影响,并且能够自动识别养殖舱壁上的附着物,并对附着物清
理之后进行处理,防止清理后的附着物二次进行附着。
8.为实现上述目的,本技术采取的技术方案是:一种养殖舱舱壁海洋附着物自动清洁装置,包括船体,设置在船体上的养殖舱,以及安装有供能管并设置在船体上的供能装置,所述供能装置利用船体产生的高温废气进行供能,所述养殖舱包括潜入水面的养殖舱壁,还包括设置于养殖仓壁上的自清洁装置,所述自清洁装置包括控制器,接收控制器控制信号用于清洁养殖舱壁的清洁器,以及设置在养殖舱壁上接收控制器控制信号用于清洁器在养殖舱壁上移动的滑架,所述清洁器包括与滑架连接的底座,设置在底座上用于检测附着物位置并向控制器发送附着物信号的检测器,安装在底座上接收控制器控制信号用于对附着物进行清理的刮除装置,安装在底座上接收控制器控制信号对刮除后的附着物进行破碎研磨并将破碎后的附着物颗粒反哺入水中的粉碎装置,所述检测器检测到附着物向控制器发送信号,控制器控制滑架带动清洁器移动到附着物位置,控制器控制刮除装置对附着物进行清理,控制器控制粉碎装置对清理后的附着物进行破碎研磨后反哺入水中。
9.上述的养殖舱舱壁海洋附着物自动清洁装置,所述刮除装置包括开设在底座上的刮除腔,安装在刮除腔内的刮板,挂板上连接有接收控制器控制信号并对刮板进行推动的动力装置,所述动力装置包括连接在刮板一侧的伸缩推杆,以及连接在刮板另一侧的伸缩拉杆,所述伸缩推杆的另一端连接有推杆供能管,并通过推杆控制阀与供能管连接,所述伸缩拉杆的另一端连接有拉杆供能管,并通过拉杆控制阀与供能管连接,所述推杆控制阀与拉杆控制阀在控制器的控制信号下进行启闭。
10.上述的养殖舱舱壁海洋附着物自动清洁装置,所述刮除器还包括一设置在刮除腔侧壁上的高压喷汽口,所述高压喷汽口的进气端连接喷汽管,喷汽管的另一端通过喷汽控制阀与供能管连接,喷汽控制阀在控制器的控制信号下进行启闭。
11.上述的养殖舱舱壁海洋附着物自动清洁装置,所述粉碎装置设置在刮除腔底部,所述粉碎装置包括开设在刮除腔底部的物料进口,以及开设在底座上的粉碎腔,所述粉碎腔的底部设置有物料出口,所述粉碎腔内设置有粉碎器,所述粉碎器包括一一端转动连接在物料出口处的粉碎板,粉碎板的另一端倾斜向上延伸到物料进口处,所述粉碎板上连接有用于将粉碎板向内推压的粉碎推动杆,粉碎推动杆的一端连接有粉碎供能管,并通过粉碎控制阀与供能管连接,粉碎控制阀在控制器的控制信号下进行启闭,在粉碎板与刮除腔的侧壁之间设置有用于粉碎板回位的回拉弹簧。
12.上述的养殖舱舱壁海洋附着物自动清洁装置,所述滑架包括滑架纵杆和滑架横杆,所述滑架纵杆与养殖舱壁连接,滑架横杆通过垂直移动机构安装在滑架纵杆上,底座通过水平移动机构连接在滑架横杆上。
13.上述的养殖舱舱壁海洋附着物自动清洁装置,所述滑架纵杆设置有两根,所述滑架横杆设置在两根滑架纵杆之间,所述垂直移动机构包括开设在滑架纵杆上的垂直槽,安装在垂直槽内的垂直滑块,垂直滑块与滑动横杆连接,垂直滑块的下端连接有滑块推杆,滑块推杆的另一端连接有滑块供能管,滑块供能管通过滑块控制阀与供能管连接,滑块控制阀在控制器的控制信号下进行启闭。
14.上述的养殖舱舱壁海洋附着物自动清洁装置,所述垂直滑块与滑动横杆之间设置有用于调整滑动横杆与养殖舱壁之间距离的调整器,所述调整器包括与供能管连接用于推出滑动横杆的外推气压泵,以及用于连接垂直滑块与滑动横杆的弹簧,还包括套接在滑动
横杆外侧,并与垂直滑块连接的u型固定器。
15.上述的养殖舱舱壁海洋附着物自动清洁装置,所述水平移动机构包括开设在滑架横杆内侧面的水平槽,安装在水平槽内的水平滑块,底座连接在水平滑块上,滑架横杆的外侧套接有底座套筒,底座套筒绕过滑架横杆与底座连接,水平滑块的左侧设置有左推杆,左推杆的另一端连接有左推杆供能管,左推杆供能管通过左控制阀与供能管连接,水平滑块的右侧设置有右推杆,右推杆的另一端连接有右推杆供能管,右推杆供能管通过右控制阀与供能管连接。
16.上述的养殖舱舱壁海洋附着物自动清洁装置的清洁方法,包括以下步骤:
17.步骤一:附着物检测,检测器检测附着物,向控制器发送附着物信号;
18.步骤二:滑动横杆移动,控制器控制外推气压泵将滑动横杆向外推出,控制器控制滑块控制阀打开,气体推动滑块推杆向上,将垂直滑块推到附着物的水平位置;
19.步骤三:清洁器移动,控制器控制左控制阀打开,左推杆供能管内的气体推动左推杆将水平滑块向右侧推出,到达附着物的垂直位置,控制器关闭外推气压泵,在弹簧的作用下将滑动横杆向养殖舱壁的方向拉回,使刮除腔盖在附着物上;
20.步骤四:附着物刮除,控制器控制喷汽控制阀打开,高温废气通过喷汽口喷出,将附着物高温处理,控制器控制推杆控制阀打开,推杆供能管推动伸缩推杆上的刮板,将高温处理后的附着物刮除,推杆控制阀关闭,控制器控制拉杆控制阀打开,拉杆供能管推动伸缩拉杆,将刮板推回原来的位置;
21.步骤五:附着物粉碎,刮除的附着物沿物料进口进入刮除腔,落在粉碎板上,控制器控制粉碎控制阀开启,粉碎供能管推动粉碎推动杆前端的粉碎板向内挤压附着物,控制器控制粉碎控制阀关闭,回拉弹簧将粉碎板拉回,重复上述动作,直至将附着物挤碎,从物料出口落出;
22.步骤六:清洁器归位,控制器打开外推气压泵,将滑动横杆向外推出,控制器控制右控制阀打开,右推杆供能管内的气体推动右推杆将水平滑块向左侧推出,推至清洁器原始垂直位置,控制器控制滑块控制阀关闭,在重力的作用下,滑动横杆沿垂直槽向下运动至清洁器原始水平位置,控制器关闭外推气压泵,在弹簧的作用下将滑动横杆向养殖舱壁的方向拉回。
23.本发明一种养殖舱舱壁海洋附着物自动清洁装置及清洁方法的有益效果是:通过使用高温废气进行供能,能够做到资源利用最大化,对资源进行二次利用,且使用高温废气提供动力,降低能源消耗,通过使用滑架与底座,能够确保清洁器在养殖舱侧壁上移动,确保养殖舱侧面没有清理死角;通过使用刮除装置,以及在刮除之间进行高温蒸汽喷射,能够有效彻底的将附着物进行清理并杀死,防止附着物二次附着;通过使用粉碎装置,对贝类附着物进行挤压粉碎,能够将贝类附着物上的棱角抹掉,防止鱼类吞服或划伤鱼鳞,并且通过粉碎装置的粉碎,粉碎成细小颗粒,也能够为鱼类提供天然食物;通过检测器,能够及时检测出附着物的情况,方便自清洁装置及时对附着物进行清理;通过使用推杆控制阀、拉杆控制阀、粉碎控制阀、滑块控制阀,能够充分利用高温废气的高温高压特性,为刮除装置、粉碎装置和移动装置提供动力。
24.通过使用养殖舱舱壁海洋附着物自动清洁装置的清洁方法对养殖舱壁进行清理,能够及时的对附着物进行发现,并利用高温废气提供驱动动力,移动自清洁装置,对附着物
进行刮除粉碎,通过高温废气推动伸缩杆以及滑动移动自清洁装置,能够有效的降低自清洁装置产生的噪音,减少噪音对鱼类的影响,提高鱼类生长质量。
附图说明
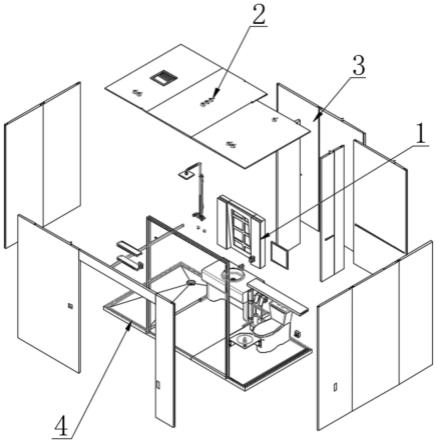
25.图1为本发明整体安装结构示意图;
26.图2为本发明自清洁装置结构示意图;
27.图3为本发明底座结构侧视示意图;
28.图4为本发明滑架纵杆结构剖面示意图;
29.图5为本发明滑架纵杆立体结构示意图;
30.图6为本发明左推杆结构示意图;
31.图7为本发明a部结构示意图;
32.图8为本发明b部结构示意图。
具体实施方式
33.为使本领域技术人员更好的理解本发明的技术方案,下面结合具体实施方式及附图对本技术的技术方案进行说明。
34.如图1-8所示,一种养殖舱舱壁海洋附着物自动清洁装置,与常规的大型船相比,养殖工船在船体上设置有用于鱼类养殖的养殖舱,以及安装有供能管并设置在船体上的供能装置,供能装置利用船体产生自身的动力装置产生的高温废气进行供能,养殖舱包括潜入水面的养殖舱壁1,养殖舱至少包括4面养殖舱壁,也可以使用6面养殖舱壁进行设置,养殖舱的底部由养殖舱底壁和连接板构成,连接板与养殖舱侧壁连接,连接板向内收敛,与养殖舱壁构成锥形,养殖舱内出水口设置在养殖舱底壁的中间,通常在至少一侧的养殖舱壁的底部设置有进水孔,通过进水电机向养殖舱内供水,进水电机沿着养殖舱壁向侧面进水,使养殖舱内的水呈旋转状,在养殖仓壁上设置有用于清理养殖舱壁的自清洁装置,自清洁装置包括控制器,控制器使用plc控制器或者是能够执行设置程序的控制器,接收控制器控制信号用于清洁养殖舱壁的清洁器2,以及设置在养殖舱壁上接收控制器控制信号用于清洁器在养殖舱壁上移动的滑架3,滑架包括滑架纵杆31和滑架横杆32,滑架纵杆与养殖舱壁连接,滑架横杆通过垂直移动机构安装在滑架纵杆上,清洁器包括与滑架连接的底座21,。
35.进一步,滑架纵杆设置有两根,滑架横杆设置在两根滑架纵杆之间,垂直移动机构包括开设在滑架纵杆上的垂直槽33,安装在垂直槽内的垂直滑块34,垂直滑块与滑动横杆连接,垂直滑块的下端连接有滑块推杆35,滑块推杆的另一端连接有滑块供能管,滑块供能管通过滑块控制阀与供能管连接,滑块控制阀在控制器的控制信号下进行启闭。
36.垂直滑块与滑动横杆之间设置有用于调整滑动横杆与养殖舱壁之间距离的调整器,所述调整器包括与供能管连接用于推出滑动横杆的外推气压泵36,以及用于连接垂直滑块与滑动横杆的弹簧,还包括套接在滑动横杆外侧,并与垂直滑块连接的u型固定器37。u型固定器的底端开设有外推气压泵入口30,u型固定器的前端内侧设置有弹簧38,外推气压泵向外推动滑动横杆,滑动横杆将弹簧挤压,停止外推气压泵推动时,弹簧将滑动横杆推回原位置。
37.水平移动机构包括开设在滑架横杆内侧面的水平槽,安装在水平槽内的水平滑
块,滑架横杆的外侧套接有底座套39,底座套筒绕过滑架横杆与底座连接,水平滑块的左侧设置有左推杆22,左推杆的另一端连接有左推杆供能管23,左推杆供能管通过左控制阀24与供能管连接,水平滑块的右侧设置有右推杆,右推杆的另一端连接有右推杆供能管,右推杆供能管通过右控制阀与供能管连接。左控制阀和右控制阀使用进气出气一体阀,即右控制阀关闭时,不能向有推杆供能管中供气,但是右推杆供能管中的气体可以排除,当打开右控制阀时,功能装置向右推杆供能管中供气,右推杆供能管中的气体不能排出。左控制阀同右控制阀原理,以下方案中的控制阀采用同样原理。
38.左推杆使用伸缩杆,具体的,可以使用设置在左推杆供能管中的橡胶杆25,橡胶杆与左推杆供能管之间密接,需要推动水平滑块时,左控制阀打开,向左推杆供能管中进入高温高压气体,高温高压气体推动橡胶杆向外推出,在橡胶杆推出的过程中,沿水平槽的方向推动水平滑块。橡胶杆的长度与滑架横杆的长度相同,左推杆供能管的长度与橡胶杆的长度相同,向左推杆供能管中推入橡胶杆时,左推杆供能管能够将橡胶杆纳入。右推杆与左推杆原理相同。
39.底座通过水平移动机构连接在滑架横杆上,底座与水平滑块连接,清洁器还包括设置在底座上用于检测附着物位置并向控制器发送附着物信号的检测器,检测器使用红外检测器,红外检测器贴近养殖舱壁设置,防止因鱼类游动影响检测结果,红外检测器检测底座的原点与最远位置之间的距离,设定为初始值,即养殖舱壁四周到红外检测器之间的距离,红外检测器连续几次检测到的距离相同并且小于设定的初始值的距离时,控制器即判定该处有附着物,检测次数设置为2-10次。
40.在底座上安装有接收控制器控制信号用于对附着物进行清理的刮除装置,刮除装置包括开设在底座上的刮除腔41,安装在刮除腔内的刮板42,刮板上连接有接收控制器控制信号并对刮板进行推动的动力装置,动力装置包括连接在刮板一侧的伸缩推杆43,以及连接在刮板另一侧的伸缩拉杆44,伸缩推杆的另一端连接有推杆供能管,并通过推杆控制阀45与供能管连接,伸缩拉杆的另一端连接有拉杆供能管,并通过拉杆控制阀46与供能管连接,推杆控制阀与拉杆控制阀在控制器的控制信号下进行启闭。伸缩推杆与伸缩拉杆的工作原理与左推杆的工作原理相同。
41.在刮除腔的两侧开始有用于限定刮板位置及确保刮板移动方形的刮板槽47,刮板的两端滑动放置在刮板槽内。
42.进一步,刮除器还包括一设置在刮除腔侧壁上的高压喷汽口48,高压喷汽口的进气端连接喷汽管,喷汽管的另一端通过喷汽控制阀49与供能管连接,喷汽控制阀在控制器的控制信号下进行启闭。
43.在底座上还安装有接收控制器控制信号对刮除后的附着物进行破碎研磨并将破碎后的附着物颗粒反哺入水中的粉碎装置,粉碎装置设置在刮除腔底部,粉碎装置包括开设在刮除腔底部的物料进口51,以及开设在底座上的粉碎腔52,粉碎腔的底部设置有物料出口53,粉碎腔内设置有粉碎器,粉碎器包括一一端转动连接在物料出口处的粉碎板54,粉碎板使用坚硬的金属材质,粉碎板的另一端倾斜向上延伸到物料进口处,粉碎板的上端使用橡胶材质的橡胶垫55,防止与物料进口的底端发生硬性摩擦,造成损坏,粉碎板上连接有用于将粉碎板向内推压的粉碎推动杆56,粉碎推动杆的一端连接有粉碎供能管,并通过粉碎控制阀57与供能管连接,粉碎控制阀在控制器的控制信号下进行启闭,粉碎推动杆与粉
碎板之间通过转动器59连接,便于粉碎推动杆直线推动粉碎板,粉碎板围绕物料出口出的转动连接转动,在粉碎板与刮除腔的侧壁之间设置有用于粉碎板回位的回拉弹簧58,粉碎后的附着物残渣排放到养殖舱内,重的随养殖舱内的水流排出养殖舱,轻的细小颗粒可被鱼类吞食,提供养料。
44.检测器检测到附着物向控制器发送信号,控制器控制滑架带动清洁器移动到附着物位置,控制器控制刮除装置对附着物进行清理,控制器控制粉碎装置对清理后的附着物进行破碎研磨后反哺入水中。
45.一种养殖舱舱壁海洋附着物自动清洁装置的清洁方法,包括以下步骤:
46.步骤一:附着物检测,检测器检测附着物,向控制器发送附着物信号;
47.步骤二:滑动横杆移动,控制器控制外推气压泵将滑动横杆向外推出,控制器控制滑块控制阀打开,气体推动滑块推杆向上,将垂直滑块推到附着物的水平位置;
48.步骤三:清洁器移动,控制器控制左控制阀打开,左推杆供能管内的气体推动左推杆将水平滑块向右侧推出,到达附着物的垂直位置,控制器关闭外推气压泵,在弹簧的作用下将滑动横杆向养殖舱壁的方向拉回,使刮除腔盖在附着物上;
49.步骤四:附着物刮除,控制器控制喷汽控制阀打开,高温废气通过喷汽口喷出,将附着物高温处理,控制器控制推杆控制阀打开,推杆供能管推动伸缩推杆上的刮板,将高温处理后的附着物刮除,推杆控制阀关闭,控制器控制拉杆控制阀打开,拉杆供能管推动伸缩拉杆,将刮板推回原来的位置;
50.步骤五:附着物粉碎,刮除的附着物沿物料进口进入刮除腔,落在粉碎板上,控制器控制粉碎控制阀开启,粉碎供能管推动粉碎推动杆前端的粉碎板向内挤压附着物,控制器控制粉碎控制阀关闭,回拉弹簧将粉碎板拉回,重复上述动作,直至将附着物挤碎,从物料出口落出;
51.步骤六:清洁器归位,控制器打开外推气压泵,将滑动横杆向外推出,控制器控制右控制阀打开,右推杆供能管内的气体推动右推杆将水平滑块向左侧推出,推至清洁器原始垂直位置,控制器控制滑块控制阀关闭,在重力的作用下,滑动横杆沿垂直槽向下运动至清洁器原始水平位置,控制器关闭外推气压泵,在弹簧的作用下将滑动横杆向养殖舱壁的方向拉回。
52.当然,上述说明并非对本发明的限制,本发明也并不局限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。